![Urban Traffic Optimization
• Through routing of vehicles
- [Traffic Optimization in Transport Networks Based on Local Routing,
The European Physical Journal, 2010]
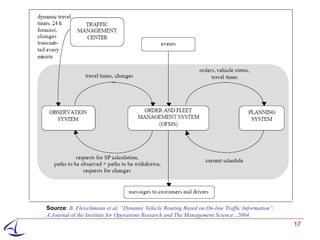
- [Dynamic Vehicle Routing Based on On-line Traffic Information, A
Journal of the Institute for Operations Research & The Management
Science, 2004]
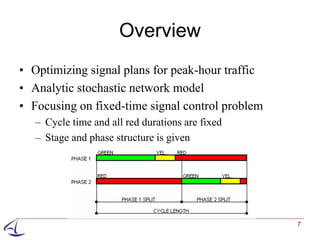
• Through traffic signal control
– Fixed-time method
[A Surrogate Model for Traffic Optimization of Congested Networks:
an Analytic Queueing Network Approach”, 2009]
– Traffic-responsive method
4](https://image.slidesharecdn.com/urbantrafficestim-optim-overview-v2-121004123040-phpapp01/85/Urban-Traffic-Estimation-Optimization-An-Overview-4-320.jpg)
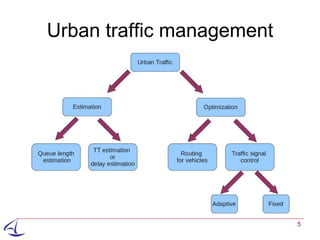
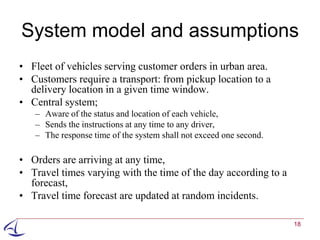


This document discusses several methods for urban traffic estimation and optimization. It describes two categories of traffic estimation - queue length and travel time estimation. Methods mentioned include using mobile phones, GPS data from mobile phones, and vehicle-to-vehicle communication. The document also discusses optimizing traffic through vehicle routing and traffic signal control, and references models for traffic optimization, signal control, and dynamic vehicle routing based on real-time traffic information.