Progress report for research paper
•Download as DOCX, PDF•
1 like•465 views

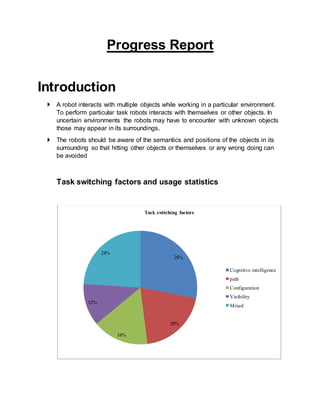
A robot interacts with multiple objects while working in a particular environment. To perform particular task robots interacts with themselves or other objects. In uncertain environments the robots may have to encounter with unknown objects those may appear in its surroundings. The robots should be aware of the semantics and positions of the objects in its surrounding so that hitting other objects or themselves or any wrong doing can be avoided

Recommended
Recommended
More Related Content
Similar to Progress report for research paper
Similar to Progress report for research paper (20)
More from Shobhit Saxena
More from Shobhit Saxena (19)
Recently uploaded
Recently uploaded (20)
Progress report for research paper
- 1. Progress Report Introduction A robot interacts with multiple objects while working in a particular environment. To perform particular task robots interacts with themselves or other objects. In uncertain environments the robots may have to encounter with unknown objects those may appear in its surroundings. The robots should be aware of the semantics and positions of the objects in its surrounding so that hitting other objects or themselves or any wrong doing can be avoided Task switching factors and usage statistics 28% 20% 16% 12% 24% Task switching factors Cognitive intelligence path Configuration Visibility Mixed
- 2. In the review we have discussed about task switching. Depending upon the nature of task like static and dynamic different frame works have been analyzed. When autonomous robots switch from one task to other, the task switching criterias like time, path, visibility, configuration etc are taken into consideration. Task regrouping helps in accomplishing the task easily with less time and cost. Multi tasking done by a single robot and by a group of robots are also analyzed. Multi tasking in uncertain environment is discussed and we have also reviewed the natural language interfaces to robots and cognitive message exchange. Multi tasking with cognitive intelligence of robots have been studied and application of natural language, human facial emotion and body gesture analysis have been done while multi tasking. Different types of robots like service robots, industrial robots, under water and aerial robots have been discussed as case studies for multi tasking. This review guarantees the following findings about task switching applying cognitive capabilities in a multi object and multi tasking environment. It is evident that the robots learn to predict future tasks and actions in uncertain dynamic environments. Robots are trained about the semantics of the environments and can predict and manipulate dynamic objects those interfere in their work environment. This helps the robots to avoid hitting themselves or other objects