Downloaded 77 times

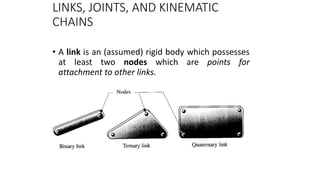
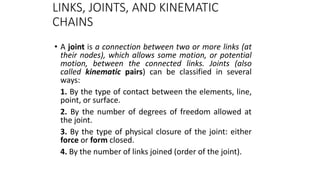
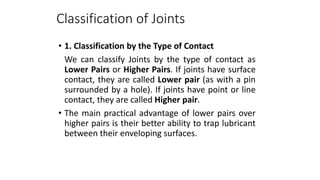
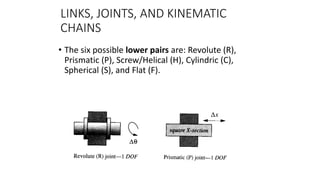
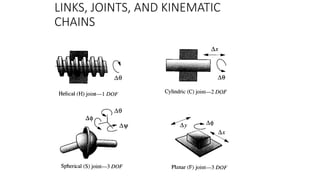
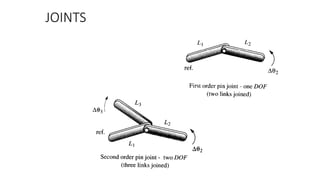

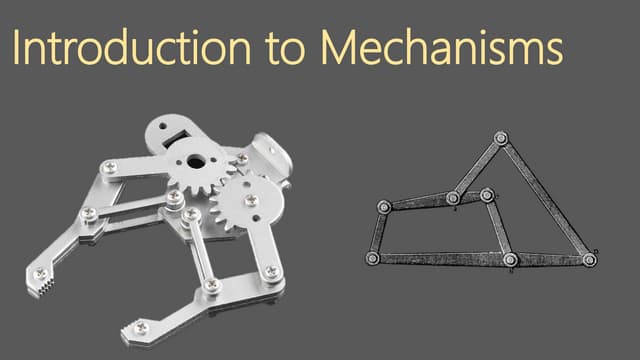
The document discusses the concepts of links, joints, and kinematic chains, defining links as rigid bodies with nodes for attachment to other links. Joints, which connect links and allow motion, are classified by various criteria including contact type, degrees of freedom, physical closure, and joint order. Specific types of joints and their characteristics, such as lower and higher pairs, are also outlined.