Download as PDF, PPTX





![What if Linux Kernel Panics
● Kexec: system call to load and boot into another kernel from the currently
running kernel (4.9.74).
○ crashkernel=128M [normal kernel cmdline]
○ irqpoll, nosmp, reset_devices [crash kernel
cmdline]
○ --load-panic option
● Kdump: Linux mechanism to dump machine memory content on kernel
panic.
● Kexec/Kdump support on ARM platforms is still experimental](https://image.slidesharecdn.com/amp-kyneticselc2018portland-180314232800/85/AMP-Kynetics-ELC-2018-Portland-23-320.jpg)

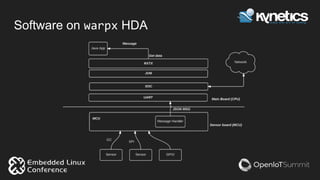
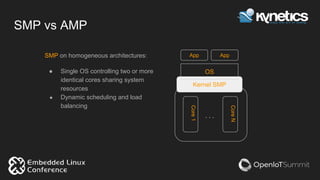
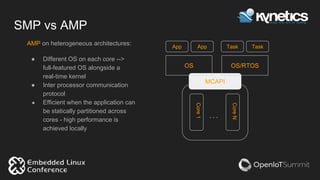
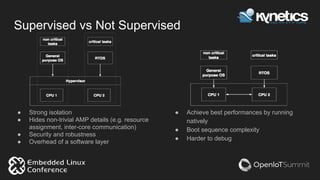
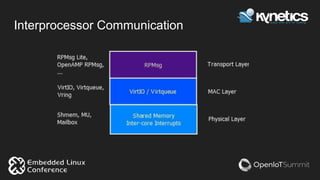
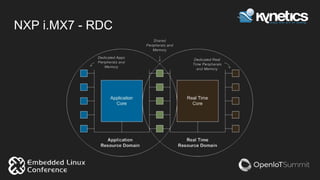
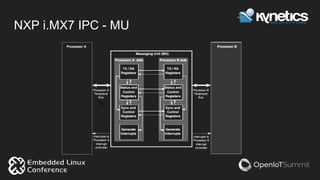
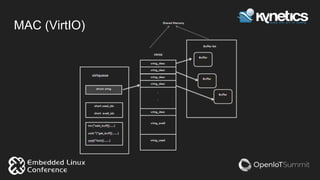
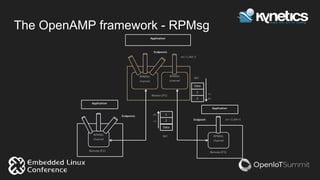
The document discusses asymmetric multiprocessing (AMP) and its benefits in hybrid architecture, particularly using the NXP i.MX7 processor. It covers the differences between symmetric and asymmetric multiprocessing, including the use of multiple operating systems and inter-processor communication protocols. Additionally, it outlines the software setup, hardware requirements, and debugging processes for implementing a demo application utilizing the OpenAMP framework.