Download as PDF, PPTX
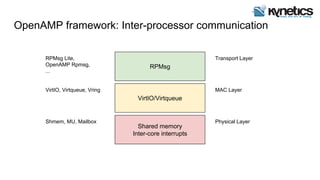
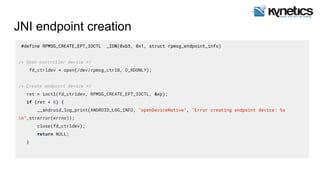
![Hybrid Android/FreeRTOS Demo - Goal
● FreeRTOS binary running on Cortex-M4
○ Sample IMU sensor
○ Send data upon configuration:
➢ VECTOR mode - raw acc, mag, gyro data
➢ NORM mode - norm of acc, mag, gyro vectors
● Android executable running on Cortex-A7 [i.e. “headless” mode]
○ Check inter-core communication and log received data on a text file
● Android app running on Cortex-A7 [i.e. “headful” mode]
○ Sensor data plotting](https://image.slidesharecdn.com/heterogeneousmultiprocessingonandrodandi-180614185221/85/Heterogeneous-multiprocessing-on-androd-and-i-mx7-17-320.jpg)
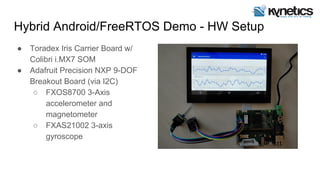
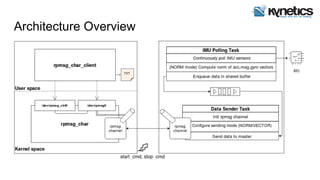

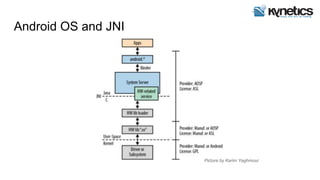






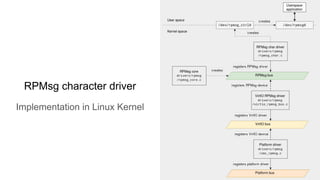
The document discusses heterogeneous multiprocessing with Android on the NXP i.MX 7, detailing Kynetics' approach to custom Android OS development for various industries. It covers topics such as the openAMP framework, integration of the rpmsg character driver in the Linux kernel, and demonstrates the use of hybrid Android/Freertos systems for sensor data processing. The document outlines performance advantages and implications for real-time applications in embedded systems.



































![Embedded Os [Linux & Co.]](https://cdn.slidesharecdn.com/ss_thumbnails/embedded-os-linux-co-1210967191310913-8-thumbnail.jpg?width=640&height=640&fit=bounds)