Downloaded 109 times
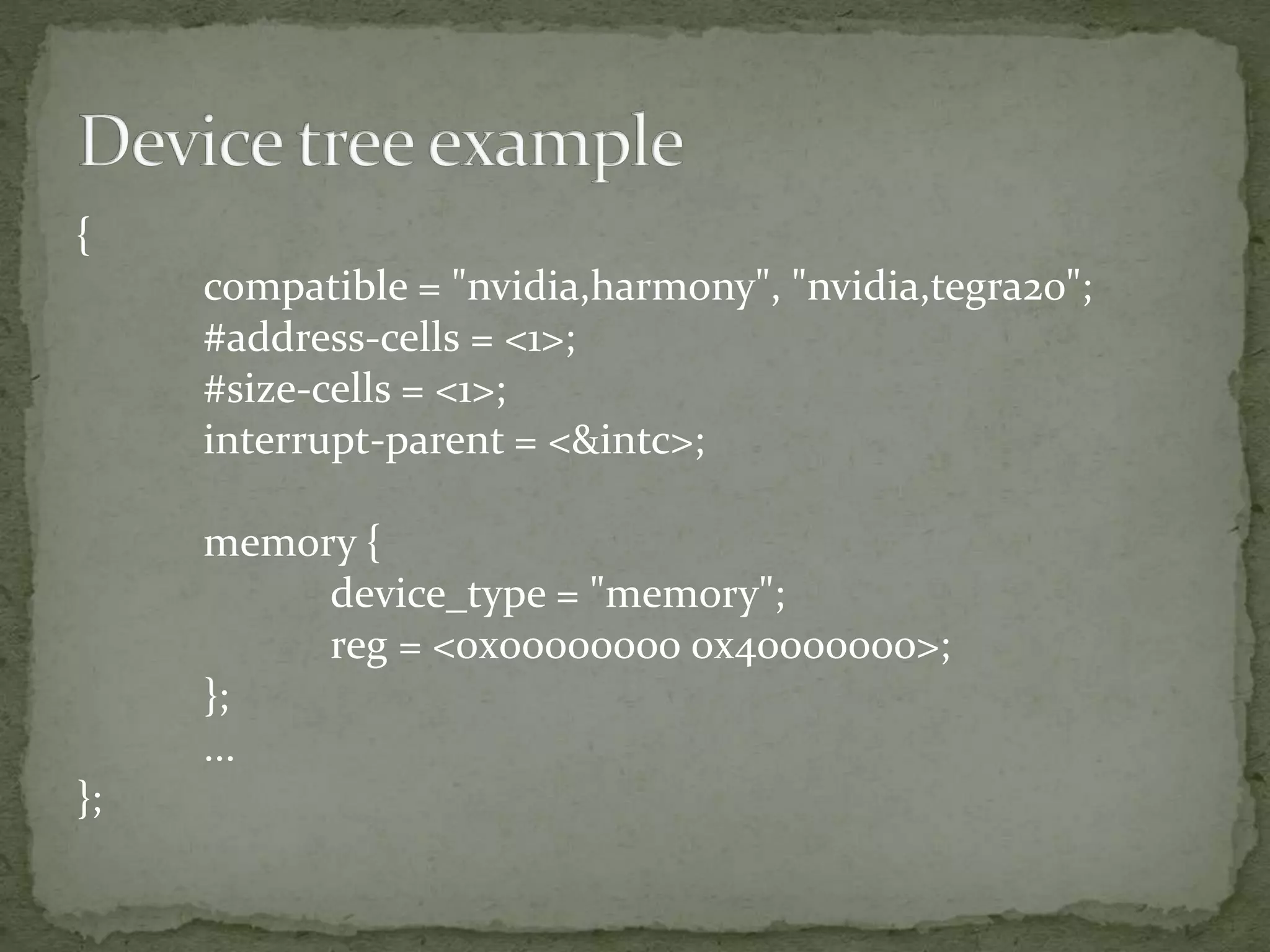
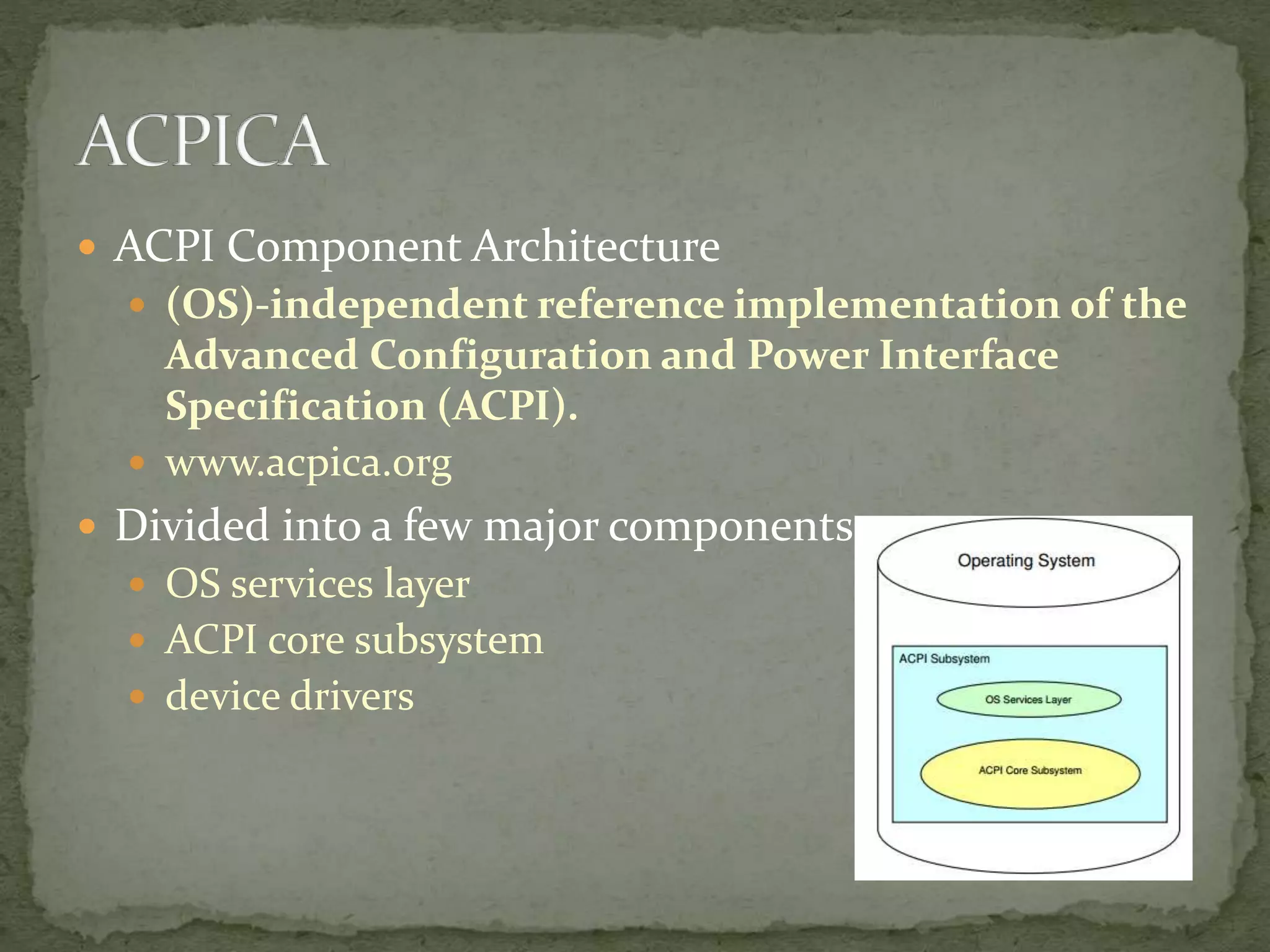

The document discusses different approaches used by operating systems to detect hardware components during system boot. It describes methods like hardcoding details, using static configuration, device trees, and dynamic configuration via ACPI and bus-based detection. ACPI is covered in depth, including its components, tables, and complexity. Platform and PCI devices are also briefly explained.




































![Linuxdd[1]](https://cdn.slidesharecdn.com/ss_thumbnails/linuxdd1-110927015846-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
















































