Downloaded 45 times



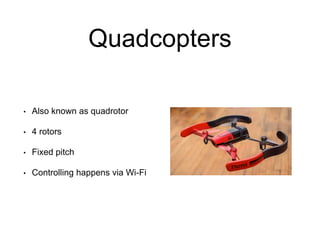










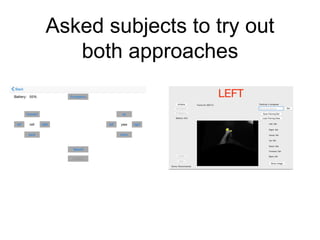

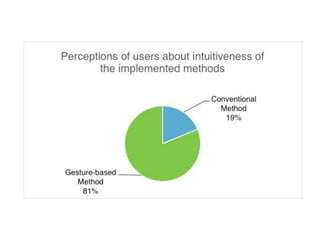
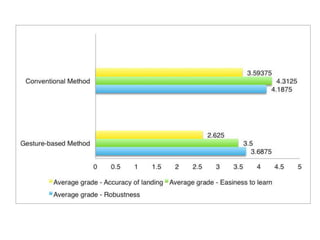
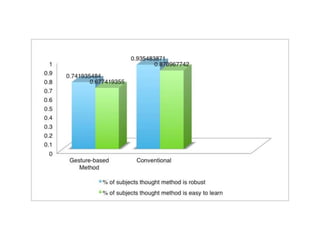

This thesis explores alternative control modalities for unmanned aerial vehicles (UAVs) to reduce the steep learning curve faced by inexperienced users. The research proposes a gesture-based control interface using motion sensing input devices, specifically a Leap Motion controller, to enhance the piloting experience and efficiency of quadcopters. The findings indicate that while users generally find the gesture-based approach more intuitive, challenges such as variability in sensor performance and training data quality need to be addressed in future work.


























































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)







