
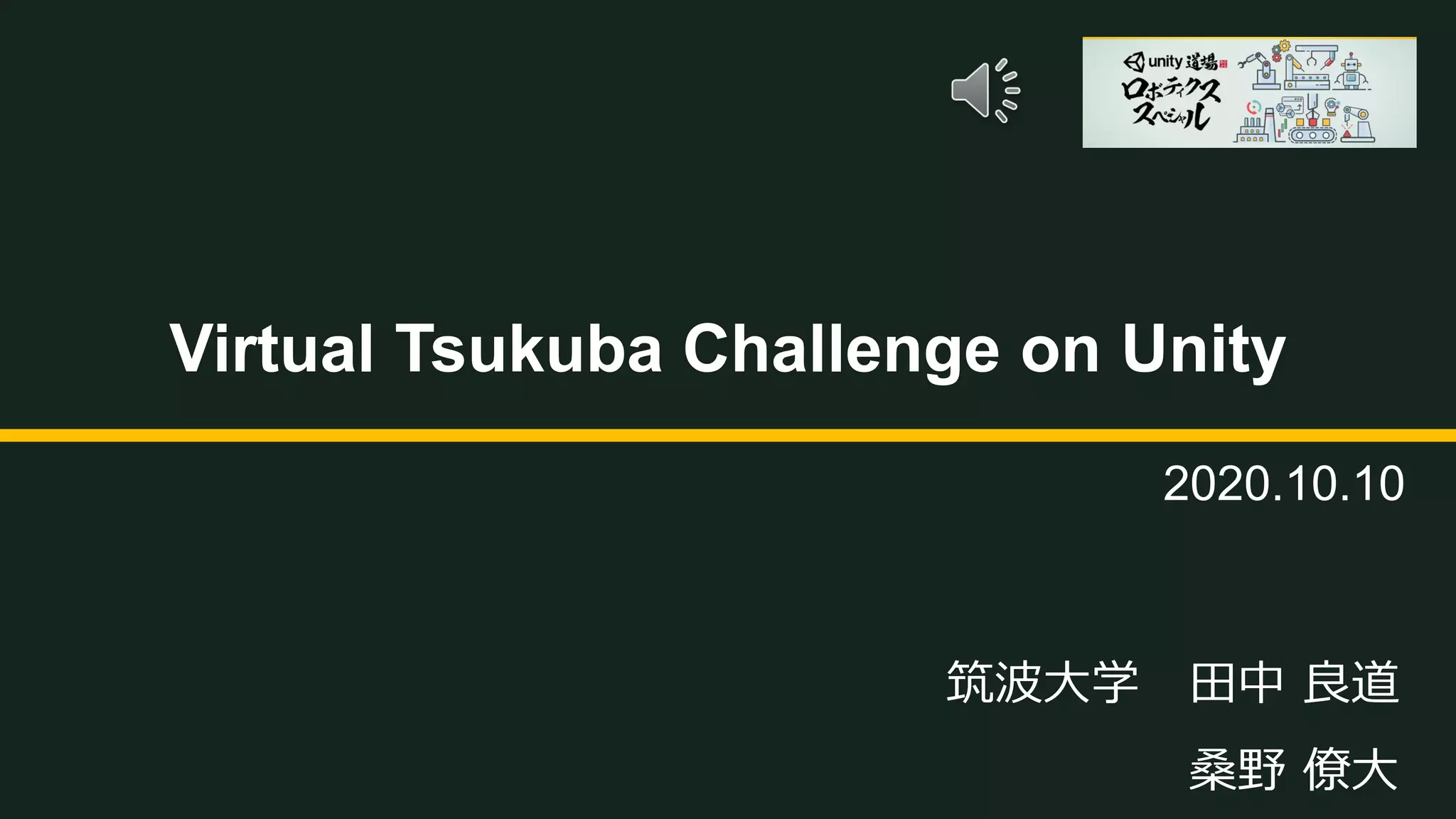

![9ロボットモデルの構築
• xml記法のファイル
• あらゆるプログラムが参照
URDF
(Unified Robot Description Format)
• テクスチャ
• 衝突モデル
• Joint設定
は自動生成
• 質量情報
• センサモデル
は手動生成
[1] https://github.com/siemens/ros-sharp/wiki/User_App_ROS_TransferURDFFromROS
API[1]](https://image.slidesharecdn.com/20201010unitydojotanakaryodo-201019074244/85/Virtual-Tsukuba-Challenge-on-Unity-10-320.jpg)
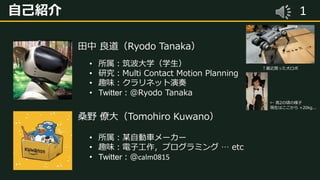
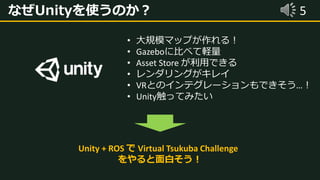
![10センサモデルの構築
3D LiDAR
[2] https://github.com/Field-Robotics-Japan/sensors_unit
6Axis IMU RGB Camera RGBD Camera
sensors_unity[2]
[3] Inamura, T. and Mizuchi, Y., 2020. SIGVerse: A cloud-based VR platform for research on social and embodied human-robot
interaction. arXiv preprint arXiv:2005.00825.
Inamura, T et. at. al [3] Figure.3 より引用
2D LiDAR・Wheel Odometry
は近日実装予定](https://image.slidesharecdn.com/20201010unitydojotanakaryodo-201019074244/85/Virtual-Tsukuba-Challenge-on-Unity-11-320.jpg)
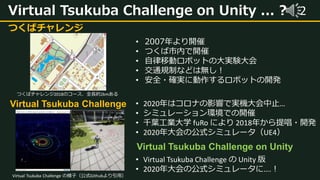
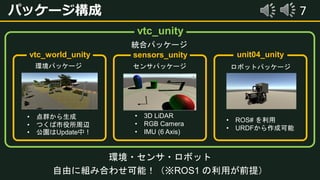
![16シミュレータ構築の難所(LiDAR)
• 通信速度が遅い(前述)
• 葉っぱなどのモデルが単調
• レーザー強度モデル無し
VTC (UE4) by fuRo
VTC on Unity
• 通信速度が速い(並列処理)
• レーザー強度モデル有り[4]
[4] 吉田 智章, 原 祥尭, “移動ロボットシミュレータにおける 3D Lidar の受光強度シ
ミュレーション”, ROBOMECH 2020, 2020.
平面プレート
の形状を観測…](https://image.slidesharecdn.com/20201010unitydojotanakaryodo-201019074244/85/Virtual-Tsukuba-Challenge-on-Unity-17-320.jpg)

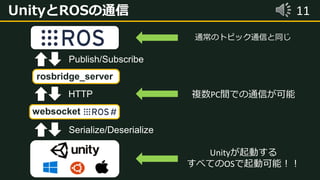
自律移動ロボットの公開実験大会である「つくばチャレンジ」は2020年,コロナウイルスの影響によりオンラインでの開催が決定し,シミュレータを用いた実験(Virtual Tsukuba Challenge(VTC))が案内されています.本講演では,VTCをUnity上に再現し,かつRobot Operating System(ROS)との連携を行うための方法をご紹介します.ロボットモデルの再現,センサのシミュレート,Unityとの通信方法についてご紹介し,Unityにおける利点や課題,将来展望について発表します。







![[DL輪読会]Deep Face Recognition: A Survey](https://cdn.slidesharecdn.com/ss_thumbnails/20181221-181221023935-thumbnail.jpg?width=640&height=640&fit=bounds)










![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Attention Is All You Need](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacks170714-170714005330-thumbnail.jpg?width=640&height=640&fit=bounds)





























