Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
TY
Uploaded by
Tomoaki Yoshida
1,372 views
VTC: Virtual Tsukuba Challenge
2020年8月1日 つくばチャレンジ説明会向けVTCシミュレータ紹介資料 (URLに間違いがあったので修正)
Software
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Downloaded 10 times
1
/ 29
2
/ 29
3
/ 29
4
/ 29
5
/ 29
6
/ 29
7
/ 29
8
/ 29
9
/ 29
10
/ 29
11
/ 29
12
/ 29
13
/ 29
14
/ 29
15
/ 29
16
/ 29
17
/ 29
18
/ 29
19
/ 29
20
/ 29
21
/ 29
22
/ 29
23
/ 29
24
/ 29
25
/ 29
26
/ 29
27
/ 29
28
/ 29
29
/ 29
More Related Content
PDF
Oldtalk - あのころの処理系は今
by
Masashi Umezawa
PDF
つくばチャレンジ2020 第二回LT大会発表資料 : つくばじゃないVTC
by
Tomoaki Yoshida
PDF
つくばチャレンジ2018技術調査報告
by
Yoshitaka HARA
PDF
つくばチャレンジ2020運営の活動報告
by
Yoshitaka HARA
PDF
つくばチャレンジ2019技術調査報告
by
Yoshitaka HARA
PPTX
Si2016 発表スライド
by
Robotics Engineer
PPTX
FutureKreateロボットシミュレータ
by
Kensei Demura
PDF
【つくばチャレンジ2020 LT2大会】KARAKAZE産学隊2020
by
HaohaoZhang2
Oldtalk - あのころの処理系は今
by
Masashi Umezawa
つくばチャレンジ2020 第二回LT大会発表資料 : つくばじゃないVTC
by
Tomoaki Yoshida
つくばチャレンジ2018技術調査報告
by
Yoshitaka HARA
つくばチャレンジ2020運営の活動報告
by
Yoshitaka HARA
つくばチャレンジ2019技術調査報告
by
Yoshitaka HARA
Si2016 発表スライド
by
Robotics Engineer
FutureKreateロボットシミュレータ
by
Kensei Demura
【つくばチャレンジ2020 LT2大会】KARAKAZE産学隊2020
by
HaohaoZhang2
Featured
PDF
2024 Trend Updates: What Really Works In SEO & Content Marketing
by
Search Engine Journal
PDF
Storytelling For The Web: Integrate Storytelling in your Design Process
by
Chiara Aliotta
PDF
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis...
by
OECD Directorate for Financial and Enterprise Affairs
PDF
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR...
by
SocialHRCamp
PDF
2024 State of Marketing Report – by Hubspot
by
Marius Sescu
PDF
Everything You Need To Know About ChatGPT
by
Expeed Software
PDF
Product Design Trends in 2024 | Teenage Engineerings
by
Pixeldarts
PDF
How Race, Age and Gender Shape Attitudes Towards Mental Health
by
ThinkNow
PDF
AI Trends in Creative Operations 2024 by Artwork Flow.pdf
by
marketingartwork
PDF
Skeleton Culture Code
by
Skeleton Technologies
PDF
PEPSICO Presentation to CAGNY Conference Feb 2024
by
Neil Kimberley
PDF
Content Methodology: A Best Practices Report (Webinar)
by
contently
PPTX
How to Prepare For a Successful Job Search for 2024
by
Albert Qian
PDF
Social Media Marketing Trends 2024 // The Global Indie Insights
by
Kurio // The Social Media Age(ncy)
PDF
Trends In Paid Search: Navigating The Digital Landscape In 2024
by
Search Engine Journal
PDF
5 Public speaking tips from TED - Visualized summary
by
SpeakerHub
PDF
ChatGPT and the Future of Work - Clark Boyd
by
Clark Boyd
PDF
Getting into the tech field. what next
by
Tessa Mero
PDF
Google's Just Not That Into You: Understanding Core Updates & Search Intent
by
Lily Ray
PDF
How to have difficult conversations
by
Rajiv Jayarajah, MAppComm, ACC
2024 Trend Updates: What Really Works In SEO & Content Marketing
by
Search Engine Journal
Storytelling For The Web: Integrate Storytelling in your Design Process
by
Chiara Aliotta
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis...
by
OECD Directorate for Financial and Enterprise Affairs
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR...
by
SocialHRCamp
2024 State of Marketing Report – by Hubspot
by
Marius Sescu
Everything You Need To Know About ChatGPT
by
Expeed Software
Product Design Trends in 2024 | Teenage Engineerings
by
Pixeldarts
How Race, Age and Gender Shape Attitudes Towards Mental Health
by
ThinkNow
AI Trends in Creative Operations 2024 by Artwork Flow.pdf
by
marketingartwork
Skeleton Culture Code
by
Skeleton Technologies
PEPSICO Presentation to CAGNY Conference Feb 2024
by
Neil Kimberley
Content Methodology: A Best Practices Report (Webinar)
by
contently
How to Prepare For a Successful Job Search for 2024
by
Albert Qian
Social Media Marketing Trends 2024 // The Global Indie Insights
by
Kurio // The Social Media Age(ncy)
Trends In Paid Search: Navigating The Digital Landscape In 2024
by
Search Engine Journal
5 Public speaking tips from TED - Visualized summary
by
SpeakerHub
ChatGPT and the Future of Work - Clark Boyd
by
Clark Boyd
Getting into the tech field. what next
by
Tessa Mero
Google's Just Not That Into You: Understanding Core Updates & Search Intent
by
Lily Ray
How to have difficult conversations
by
Rajiv Jayarajah, MAppComm, ACC
VTC: Virtual Tsukuba Challenge
1.
つくばチャレンジ説明会 2020-08-01 Virtual Tsukuba
Challenge シミュレー タ 吉田智章 千葉工業大学 未来ロボット技術研究センター
2.
つくばチャレンジ説明会 2020-08-01 VTCの紹介 •問題意識 •構成 •シミュレートするもの •想定ユースケース •対象としないこと •今後の予定
3.
つくばチャレンジ説明会 2020-08-01 問題意識 リアルワールドは難しい なぜ難しいのか? 実験室/シミュレータで代用できない本質は?
4.
つくばチャレンジ説明会 2020-08-01 問題意識 リアルワールドの難しさ •環境が複雑 •何が起こるかわからない •実物を扱う •再現性を確保しにくい •試行回数を増やしにくい
5.
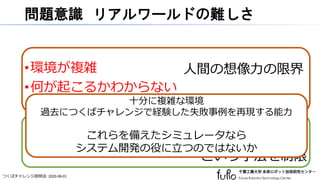
つくばチャレンジ説明会 2020-08-01 問題意識 リアルワールドの難しさ •環境が複雑 •何が起こるかわからない •実物を扱う •再現性を確保しにくい •試行回数を増やしにくい 人間の想像力の限界
6.
つくばチャレンジ説明会 2020-08-01 問題意識 リアルワールドの難しさ •環境が複雑 •何が起こるかわからない •実物を扱う •再現性を確保しにくい •試行回数を増やしにくい 人間の想像力の限界 実際に試してみる という手法を制限
7.
つくばチャレンジ説明会 2020-08-01 問題意識 リアルワールドの難しさ •環境が複雑 •何が起こるかわからない •実物を扱う •再現性を確保しにくい •試行回数を増やしにくい 人間の想像力の限界 実際に試してみる という手法を制限 十分に複雑な環境 過去につくばチャレンジで経験した失敗事例を再現する能力 これらを備えたシミュレータなら システム開発の役に立つのではないか
8.
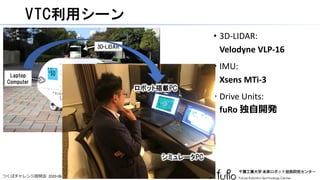
つくばチャレンジ説明会 2020-08-01 VTC利用シーン • 3D-LIDAR: Velodyne
VLP-16 • IMU: Xsens MTi-3 • Drive Units: fuRo 独自開発 8 Drive Units (Motor Encoders) IMU 3D-LIDAR Laptop Computer シミュレータPC ロボット搭載PC
9.
つくばチャレンジ説明会 2020-08-01 動作環境 シミュレータ側PC • Windows10 •
速いCPU Core i7 7700HQ等で確認 • Unreal Engine4 が動く速いGPU GTX1050, GTX1060等で確認 • 十分なRAM • 有線LAN ロボット側PC • 基本的にはロボットに乗せる PCそのものが良い • Linux Ubuntu 18.04, 20.04 等で確認 • 実機用Velodyne受信機 • ROS Bridge [cage_ros_stack] ROS melodic, noeticで確認 • もしくはCageClient ライブラリを使った 仮想車両インタフェース
10.
つくばチャレンジ説明会 2020-08-01 VTCがシミュレートするもの 確認走行区間を模擬した環境 PhysXで駆動する 車輪型移動ロボット 目標回転数 回転数 加速度 角速度 スキャンベクトル生成姿勢補間/トレース PhysX Scene PhysX
Visual Debugger Scan方位/時刻列Velodyne相当のプロトコル 距離/方位/時刻列 VeloView 点群 Intensity付き3D Lidar (VLP16相当)
11.
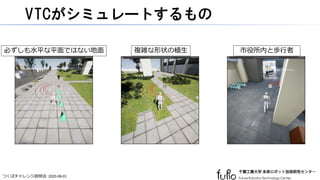
つくばチャレンジ説明会 2020-08-01 VTCがシミュレートするもの 必ずしも水平な平面ではない地面 複雑な形状の植生
市役所内と歩行者
12.
つくばチャレンジ説明会 2020-08-01
13.
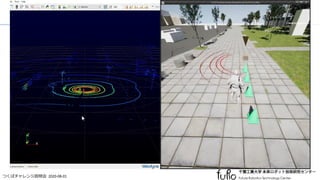
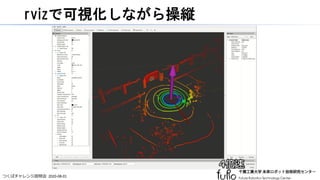
つくばチャレンジ説明会 2020-08-01 rvizで可視化しながら操縦
14.
つくばチャレンジ説明会 2020-08-01 VTCが想定するユースケース •各種上位アルゴリズムの検討検証デバッグ • 経路走行,
障害物回避, 位置推定, 地図なし走行 •確認走行区間ナビゲーションシステム開発 • 地図作成, 走行経路指示作成, 動作確認 • これらワークフローの改善 •視野や分解能の異なるLidarでの挙動変化の検証 •オドメトリだけじゃ無理、という事実の体験 • (多様な環境での検証)
15.
つくばチャレンジ説明会 2020-08-01 VTCでできないこと/対象としないこと •実世界での現象を扱うための 具体的なパラメータ決定 • 速度指示に対する車体の挙動を精密に観測したい •
物体検出のためのLidar Intensityの閾値を決定したい •実世界を走るための地図等の構築 • 確認走行区間を走るためのWaypoint座標列を決めたい • Lidar点群を記録して実世界走行用地図構築したい • 短い周期の応答を必要とする制御等 • 30~100Hz程度で動作するので、例えば1KHzで何かしたい場合そのままでは無理
16.
つくばチャレンジ説明会 2020-08-01 今後の予定 • 国土地理院基盤地図を利用した環境 •
そのワークフロー • ロボット位置の緯度経度取得 • CLIの拡充 • その他センサの実装 国土地理院基盤地図情報を利用して作成中の環境のスクリーンショット [国土地理院コンテンツ利用規約に基づく表示] 出典: 国土地理院ウェブサイト(https://fgd.gsi.go.jp/download/menu.php)
17.
つくばチャレンジ説明会 2020-08-01 付録
18.
つくばチャレンジ説明会 2020-08-01 公開ページURL • VTC
本体 https://github.com/furo-org/VTC • ROS 対応 https://github.com/furo-org/cage_ros_stack • クライアントライブラリ https://github.com/furo-org/CageClient • UE4用移動ロボット関連機能プラグイン https://github.com/furo-org/CagePlugin • UE4用ZeroMQプラグイン https://github.com/furo-org/ZMQUE • UE4用PhysX Articulation プラグイン https://github.com/yosagi/PxArticulationLink
19.
つくばチャレンジ説明会 2020-08-01 参考文献 • 吉田
智章, 原 祥尭: "移動ロボットシミュレータにおける 3D Lidar の受光強度シミュレーション", ROBOMECH 2020. • 吉田 智章, 入江 清, 原 祥尭, 鈴木 太郎, 西村 健志, 大和 秀彰, 友納 正裕: "つくばチャレンジ2019の事前検証が困難な環境のための 移動ロボットシミュレータ", SI 2019. • 吉田 智章, 入江 清, 原 祥尭, 西村 健志: "Unreal Engine4 を利用し たつくばチャレンジシミュレータ", ROBOMECH 2019.
20.
つくばチャレンジ説明会 2020-08-01 参考動画URL • VTC
(Virtual Tsukuba Challenge) with lidar intensity enabled (x2) https://youtu.be/gb9t7RFmgpc • Lidar simulation with intensity response used in VTC (Virtual Tsukuba Challenge) [short version] https://youtu.be/1deEoRJNBL4
21.
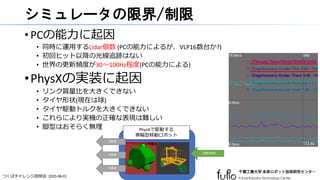
つくばチャレンジ説明会 2020-08-01 シミュレータの限界/制限 •PCの能力に起因 • 同時に運用するLidar個数
(PCの能力によるが、VLP16数台か?) • 初回ヒット以降の光線追跡はない • 世界の更新頻度が30~100Hz程度(PCの能力による) •PhysXの実装に起因 • リンク質量比を大きくできない • タイヤ形状(現在は球) • タイヤ駆動トルクを大きくできない • これらにより実機の正確な表現は難しい • 脚型はおそらく無理 PhysXで駆動する 車輪型移動ロボット 目標回転数 回転数 加速度 角速度
22.
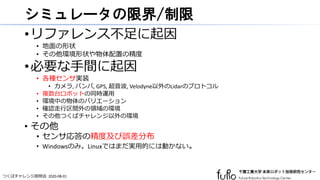
つくばチャレンジ説明会 2020-08-01 シミュレータの限界/制限 •リファレンス不足に起因 • 地面の形状 •
その他環境形状や物体配置の精度 •必要な手間に起因 • 各種センサ実装 • カメラ, バンパ, GPS, 超音波, Velodyne以外のLidarのプロトコル • 複数台ロボットの同時運用 • 環境中の物体のバリエーション • 確認走行区間外の領域の環境 • その他つくばチャレンジ以外の環境 • その他 • センサ応答の精度及び誤差分布 • Windowsのみ。Linuxではまだ実用的には動かない。
23.
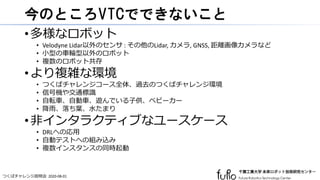
つくばチャレンジ説明会 2020-08-01 今のところVTCでできないこと •多様なロボット • Velodyne
Lidar以外のセンサ : その他のLidar, カメラ, GNSS, 距離画像カメラなど • 小型の車輪型以外のロボット • 複数のロボット共存 •より複雑な環境 • つくばチャレンジコース全体、過去のつくばチャレンジ環境 • 信号機や交通標識 • 自転車、自動車、遊んでいる子供、ベビーカー • 降雨、落ち葉、水たまり •非インタラクティブなユースケース • DRLへの応用 • 自動テストへの組み込み • 複数インスタンスの同時起動
24.
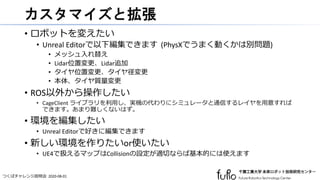
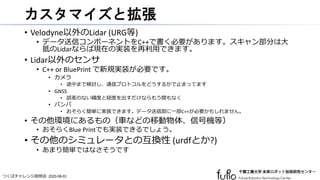
つくばチャレンジ説明会 2020-08-01 カスタマイズと拡張 • ロボットを変えたい •
Unreal Editorで以下編集できます (PhysXでうまく動くかは別問題) • メッシュ入れ替え • Lidar位置変更、Lidar追加 • タイヤ位置変更、タイヤ径変更 • 本体、タイヤ質量変更 • ROS以外から操作したい • CageClient ライブラリを利用し、実機の代わりにシミュレータと通信するレイヤを用意すれば できます。あまり難しくないはず。 • 環境を編集したい • Unreal Editorで好きに編集できます • 新しい環境を作りたいor使いたい • UE4で扱えるマップはCollisionの設定が適切ならば基本的には使えます
25.
つくばチャレンジ説明会 2020-08-01 カスタマイズと拡張 • Velodyne以外のLidar
(URG等) • データ送信コンポーネントをC++で書く必要があります。スキャン部分は大 抵のLidarならば現在の実装を再利用できます。 • Lidar以外のセンサ • C++ or BluePrint で新規実装が必要です。 • カメラ • 途中まで検討し、通信プロトコルをどうするかで止まってます • GNSS • 誤差のない緯度と経度を出すだけならもう間もなく • バンパ • おそらく簡単に実装できます。データ送信部に一部C++が必要かもしれません。 • その他環境にあるもの(車などの移動物体、信号機等) • おそらくBlue Printでも実装できるでしょう。 • その他のシミュレータとの互換性 (urdfとか?) • あまり簡単ではなさそうです
26.
つくばチャレンジ説明会 2020-08-01 つくばチャレンジで見かける失敗要因 ⚫ 自己位置推定 ⚫
開けた場所で乏しい特徴により自己位 置推定失敗 ⚫ 大きな角速度で旋回しスキャンが歪ん で位置推定失敗 ⚫ 群衆に囲まれて自己位置推定失敗 ⚫ 落ち葉等でスリップして自己位置推定 失敗 ⚫ 走行 ⚫ 経路走行パラメータの問題でスピンや 振動的挙動が発生し失敗 ⚫ 縁石に乗り上げて失敗 ⚫ 落ち葉等でスリップして自己位置推定 失敗 ⚫ 地図データ ⚫ 古いバージョンの地図をロードして失 敗 ⚫ 狭い環境において適切に経路が引けて なくて走行不能 ⚫障害物 ⚫ Lidar至近に障害物が入り見えなくなり衝突 ⚫ 障害物で停止する機能しか作ってなく、 静止障害物に正対して失敗 ⚫ 障害物回避経路が障害物至近に設定され衝突 ⚫ 障害物に接近しすぎて回避経路を生成できず 失敗 ⚫ 回避経路が歩道外に設定され失敗 ⚫システム, オペレーション ⚫ (メモリ周りの)バグでクラッシュ ⚫ システムの一部の起動を忘れ走行不能 ⚫ 古いバージョンの地図をロードして失敗 ⚫ ノートPCがバッテリ駆動でCPUクロックが低 下し、処理間に合わず ⚫ 振動でコネクタの接続不良が発生 ⚫ センサが故障 ⚫ 直射日光でセンサが動作不良 ⚫ 雨でセンサデータのノイズが増える
27.
つくばチャレンジ説明会 2020-08-01 VTCが想定する主な失敗要因 ⚫ 自己位置推定 ⚫
開けた場所で乏しい特徴により自己位 置推定失敗 ⚫ 大きな角速度で旋回しスキャンが歪ん で位置推定失敗 ⚫ 群衆に囲まれて自己位置推定失敗 ⚫ 落ち葉等でスリップして自己位置推定 失敗 ⚫ 走行 ⚫ 経路走行パラメータの問題でスピンや 振動的挙動が発生し失敗 ⚫ 縁石に乗り上げて失敗 ⚫ 落ち葉等でスリップして自己位置推定 失敗 ⚫ 地図データ ⚫ 古いバージョンの地図をロードして失 敗 ⚫ 狭い環境において適切に経路が引けて なくて走行不能 ⚫障害物 ⚫ Lidar至近に障害物が入り見えなくなり衝突 ⚫ 障害物で停止する機能しか作ってなく、 静止障害物に正対して失敗 ⚫ 障害物回避経路が障害物至近に設定され衝突 ⚫ 障害物に接近しすぎて回避経路を生成できず 失敗 ⚫ 回避経路が歩道外に設定され失敗 ⚫システム, オペレーション ⚫ (メモリ周りの)バグでクラッシュ ⚫ システムの一部の起動を忘れ走行不能 ⚫ 古いバージョンの地図をロードして失敗 ⚫ ノートPCがバッテリ駆動でCPUクロックが低 下し、処理間に合わず ⚫ 振動でコネクタの接続不良が発生 ⚫ センサが故障 ⚫ 直射日光でセンサが動作不良 ⚫ 雨でセンサデータのノイズが増える現状のままではできないが、多少の 作業で対応できると思われる項目
28.
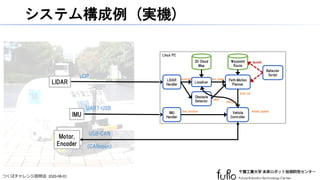
つくばチャレンジ説明会 2020-08-01 システム構成例 (実機) 28 LIDAR UDP IMU UART-USB Motor, Encoder Motor, Encoder USB-CAN (CANopen) Linux
PC LIDAR Handler IMU Handler Vehicle Controller Localizer 3D Cloud Map Obstacle Detector Path-Motion Planner Waypoint Route Behavior Script scan3d imu_motion wheel_speed odom cmd_vel est_pose obst launch
29.
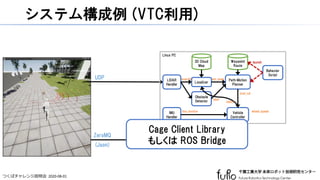
つくばチャレンジ説明会 2020-08-01 システム構成例 (VTC利用) 29 LIDAR Ethernet IMU UART-USB Motor, Encoder Motor, Encoder USB-CAN (CANopen) Linux
PC LIDAR Handler IMU Handler Vehicle Controller Localizer 3D Cloud Map Obstacle Detector Path-Motion Planner Waypoint Route Behavior Script scan3d imu_motion wheel_speed odom cmd_vel est_pose obst launch Cage Client Library もしくは ROS Bridge UDP ZeroMQ (Json)
Download


![つくばチャレンジ説明会 2020-08-01
動作環境
シミュレータ側PC
• Windows10
• 速いCPU
Core i7 7700HQ等で確認
• Unreal Engine4 が動く速いGPU
GTX1050, GTX1060等で確認
• 十分なRAM
• 有線LAN
ロボット側PC
• 基本的にはロボットに乗せる
PCそのものが良い
• Linux
Ubuntu 18.04, 20.04 等で確認
• 実機用Velodyne受信機
• ROS Bridge [cage_ros_stack]
ROS melodic, noeticで確認
• もしくはCageClient ライブラリを使った
仮想車両インタフェース](https://image.slidesharecdn.com/2020-08virtualtsukubachallenge-200801045700/85/VTC-Virtual-Tsukuba-Challenge-9-320.jpg)

![つくばチャレンジ説明会 2020-08-01
今後の予定
• 国土地理院基盤地図を利用した環境
• そのワークフロー
• ロボット位置の緯度経度取得
• CLIの拡充
• その他センサの実装
国土地理院基盤地図情報を利用して作成中の環境のスクリーンショット
[国土地理院コンテンツ利用規約に基づく表示]
出典: 国土地理院ウェブサイト(https://fgd.gsi.go.jp/download/menu.php)](https://image.slidesharecdn.com/2020-08virtualtsukubachallenge-200801045700/85/VTC-Virtual-Tsukuba-Challenge-16-320.jpg)
![つくばチャレンジ説明会 2020-08-01
参考動画URL
• VTC (Virtual Tsukuba Challenge) with lidar intensity
enabled (x2)
https://youtu.be/gb9t7RFmgpc
• Lidar simulation with intensity response used in VTC
(Virtual Tsukuba Challenge) [short version]
https://youtu.be/1deEoRJNBL4](https://image.slidesharecdn.com/2020-08virtualtsukubachallenge-200801045700/85/VTC-Virtual-Tsukuba-Challenge-20-320.jpg)