Downloaded 14 times
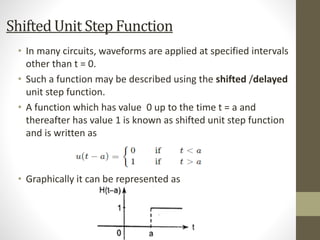
![Laplace transform of Unit Step function H(t)
By definition of Laplace transform
𝐿 𝑓 𝑡 = 𝑓 𝑠 = 0
∞
𝑒−𝑠𝑡 𝑓 𝑡 𝑑𝑡
𝐿[𝑢 𝑡 ] = 𝑢̅ 𝑠 = 0
∞
𝑒−𝑠𝑡 𝑢 𝑡 𝑑𝑡
= 0
∞
𝑒−𝑠𝑡
1𝑑𝑡
= −
1
𝑠
0 − 1
=
1
𝑠
∴ 𝑳 𝒖 𝒕 = 𝒖 𝒔 =
𝟏
𝒔](https://image.slidesharecdn.com/heavisidesfunction-201204113858/85/Heaviside-s-function-4-320.jpg)
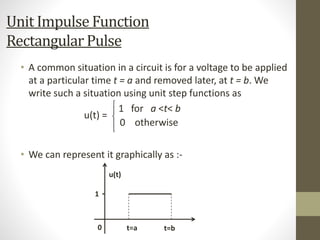
![Laplace Transform of Shifted
Unit Step Function H(t - a)
• 𝐿 𝐻 𝑡 − 𝑎 = 0
∞
𝑒−𝑠𝑡 𝐻 𝑡 − 𝑎 𝑑𝑡
= 0
𝑎
𝑒−𝑠𝑡 𝐻 𝑡 − 𝑎 𝑑𝑡 + 𝑎
∞
𝑒−𝑠𝑡 𝐻 𝑡 − 𝑎 𝑑𝑡
= 𝑎
∞
𝑒−𝑠𝑡
1 𝑑𝑡
= −
1
𝑠
(0 − 𝑒−𝑠𝑎)
∴ 𝑳[𝑯 𝒕 − 𝒂 ] =
𝒆−𝒂𝒔
𝒔](https://image.slidesharecdn.com/heavisidesfunction-201204113858/85/Heaviside-s-function-6-320.jpg)
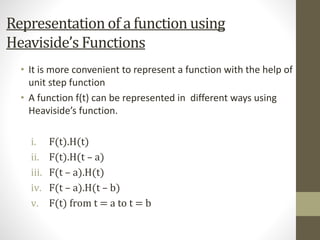
![Laplace Transform of Impulse Function
• 𝐿[𝑢 𝑡 ] = 0
∞
𝑒−𝑠𝑡 𝑓 𝑡 𝑑𝑡
= 0
𝑎
𝑒−𝑠𝑡
𝑢 𝑡 𝑑𝑡 + 𝑎
𝑏
𝑒−𝑠𝑡
𝑢 𝑡 𝑑𝑡 + 𝑏
∞
𝑒−𝑠𝑡
𝑢 𝑡 𝑑𝑡
= 0
𝑎
𝑒−𝑠𝑡 (0) + 𝑎
𝑏
𝑒−𝑠𝑡 𝑢 𝑡 𝑑𝑡 + 𝑏
∞
𝑒−𝑠𝑡 (0)
= 𝑎
𝑏
𝑒−𝑠𝑡
∴ 𝑳[𝒖 𝒕 ] = −
𝟏
𝒔
[𝒆−𝒔𝒕 − 𝒆−𝒂𝒔]](https://image.slidesharecdn.com/heavisidesfunction-201204113858/85/Heaviside-s-function-8-320.jpg)
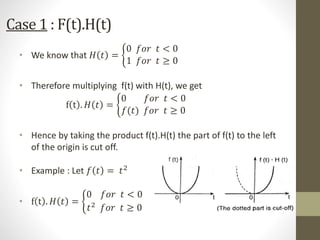
![Case 5 : Representation of the part of the
curve f(t) from t = a to t = b
• We see that H(t-a) is a unit function on the right of t=a and H(t-b)
on the right of t=b.
• So the function [H(t-a)- H(t-b)] is zero before t=a and after t=b.
• Therefore here H(t)= 𝐻 𝑡 =
1 𝑓𝑜𝑟 𝑎 < 𝑡 < 𝑏
0 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
Hence the only remaining part of f(t). [H(t-a)- H(t-b)] is between
t=a and t=b called as filter function.](https://image.slidesharecdn.com/heavisidesfunction-201204113858/85/Heaviside-s-function-14-320.jpg)

The document discusses Heaviside's unit step function, which is used to model abrupt changes in functions at specific times. It has a value of 0 for negative time and 1 for positive time. Shifted and delayed step functions are also discussed. The Laplace transform of various step functions is provided. Applications include modeling the switching on/off of voltages in electrical circuits and representing signals that switch at a given time.


























![Digital Signal Processing[ECEG-3171]-Ch1_L04](https://cdn.slidesharecdn.com/ss_thumbnails/dspl4-180427094424-thumbnail.jpg?width=640&height=640&fit=bounds)








































