Download as PDF, PPTX

 = s↵
F(s)
m 1X
k=0
s↵ k 1
f(k)
(0)
R. Hilfer. Applications Of Fractional Calculus In Physics. World Scientific, 2000. ISBN 978-981-02-3457-7.](https://image.slidesharecdn.com/fractionalifacpresentation-140819050430-phpapp02/85/Amiodarone-administration-7-320.jpg)
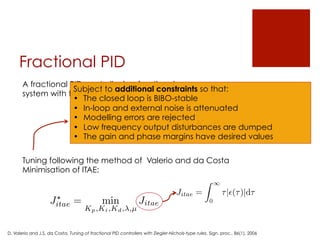
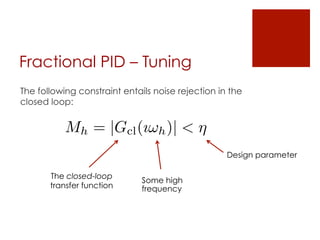
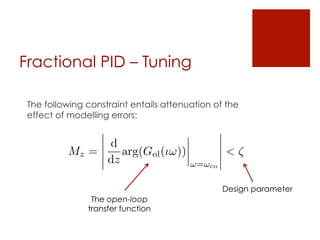
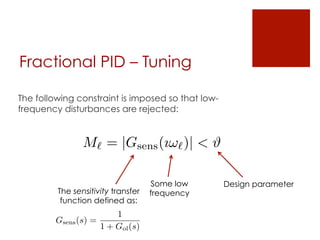
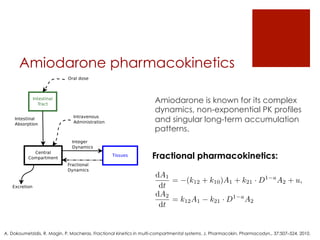
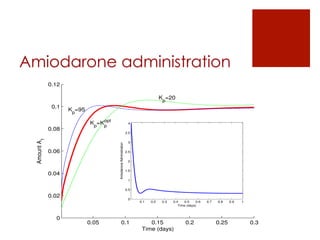
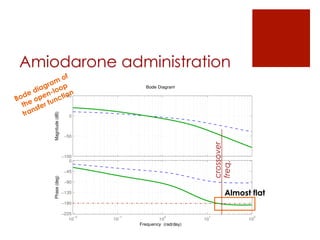
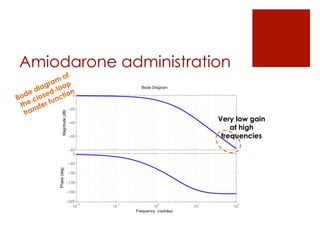
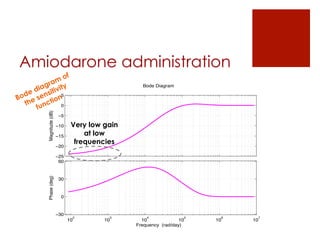
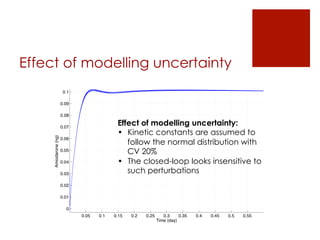



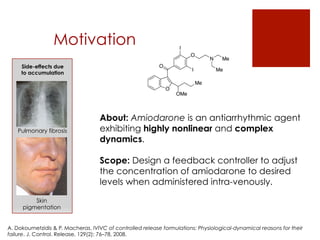
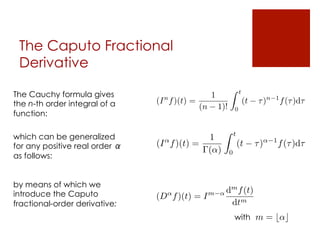
This document summarizes the design of a fractional PID controller to adjust amiodarone concentration levels intravenously. Amiodarone exhibits complex, fractional pharmacokinetics. A fractional PID controller was tuned using constraints to ensure stability, noise rejection, and insensitivity to modeling errors. Simulations showed the closed-loop system was stable and resilient to disturbances with the controller able to filter noise and be insensitive to uncertainties in kinetic parameters.
















































![Polymer [ बहुलक ] Chemistry Notes PDF - Irfanullah Mehar - JJ Sir Chemistry.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/polymerchemistrynotespdf-irfanullahmehar-jjsirchemistry-260210172118-3f9b37f7-thumbnail.jpg?width=640&height=640&fit=bounds)









