Downloaded 406 times
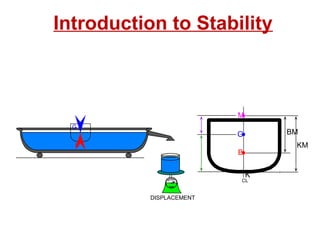

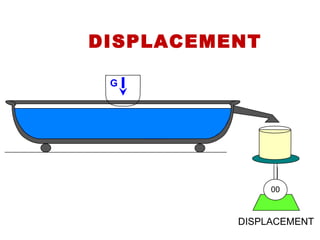
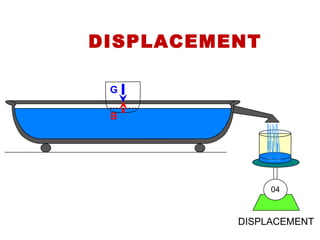
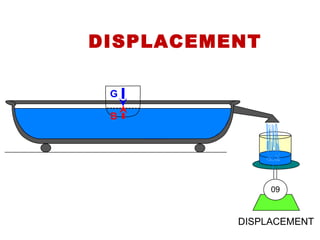
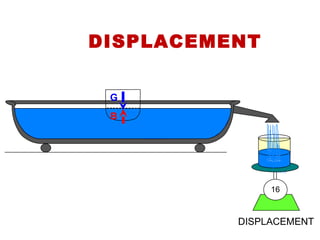
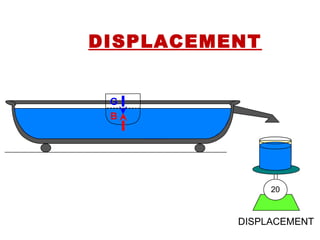
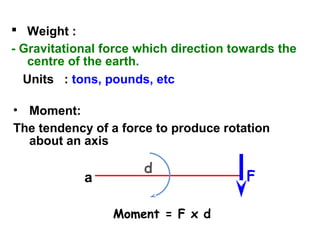
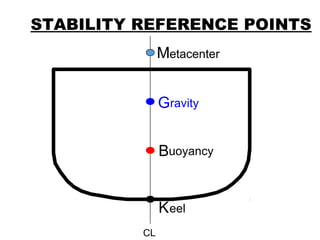
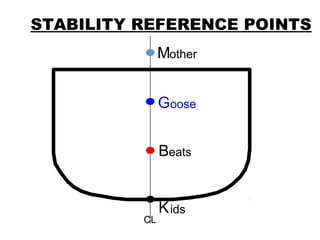
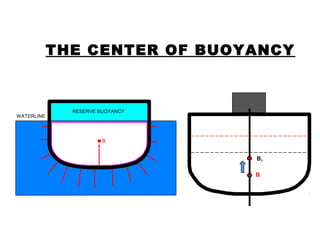
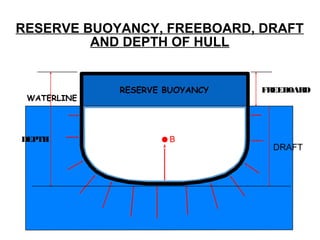
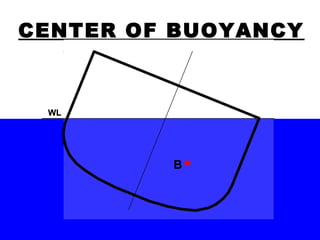
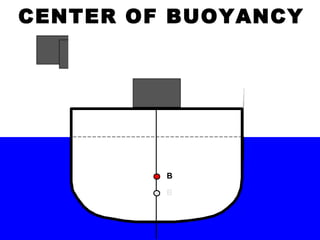
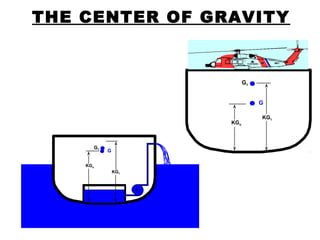
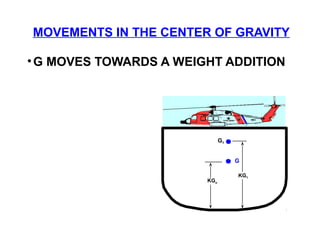
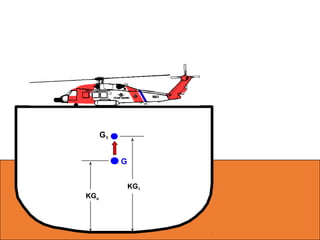
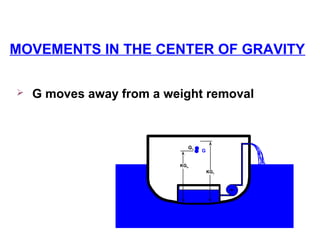
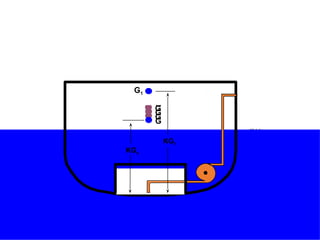
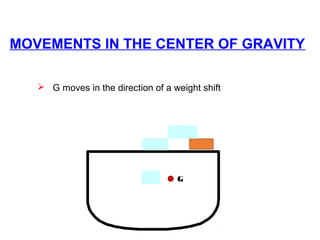
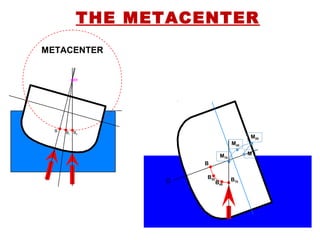
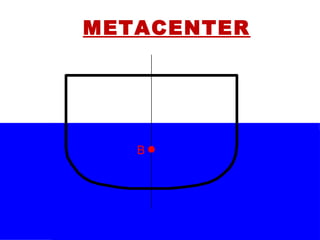
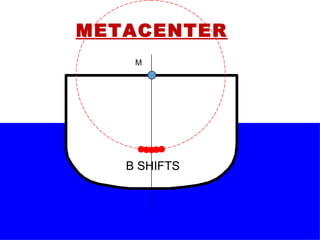
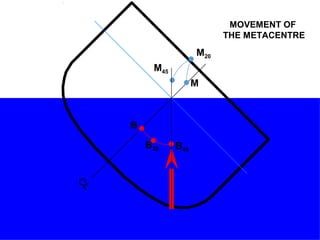
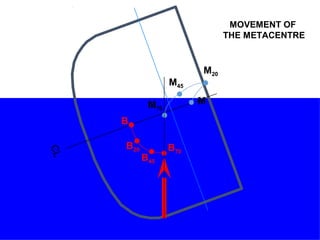
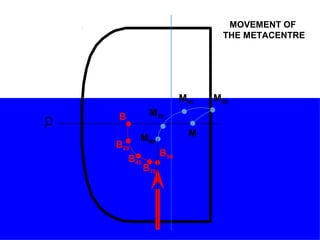
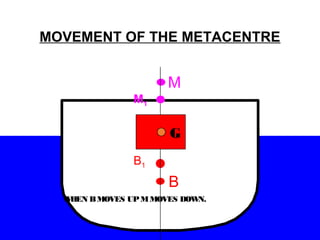
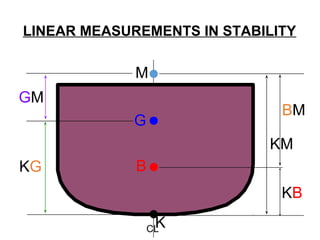
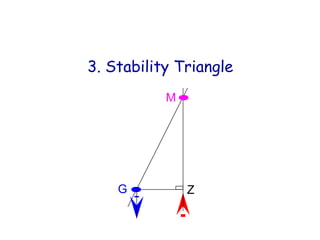
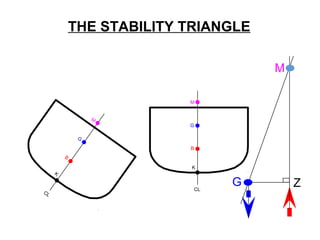
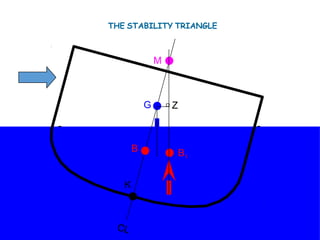
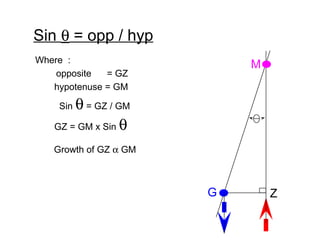
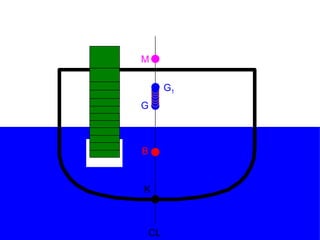
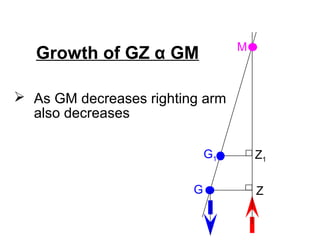
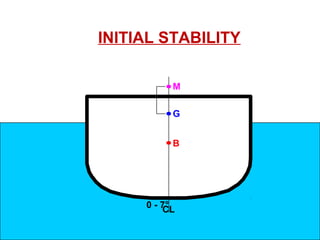
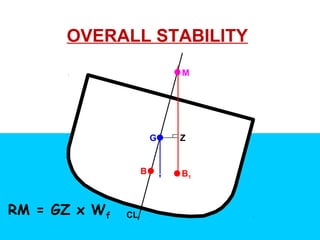
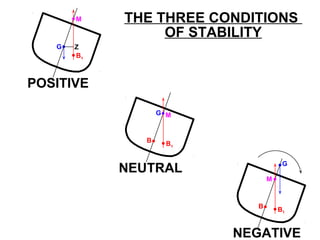
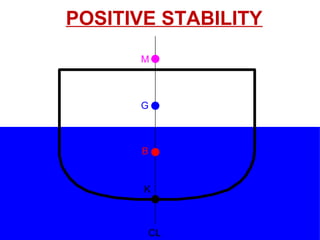
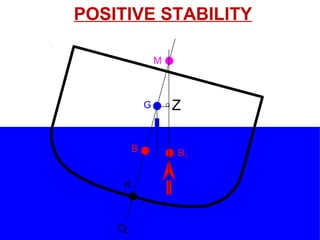
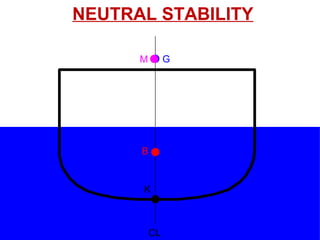
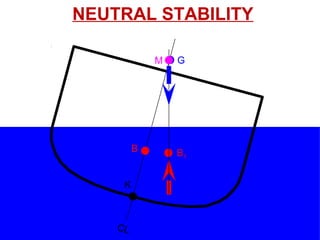
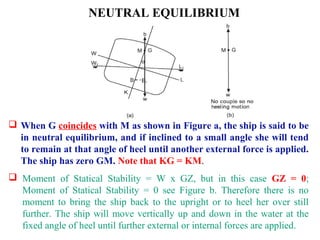

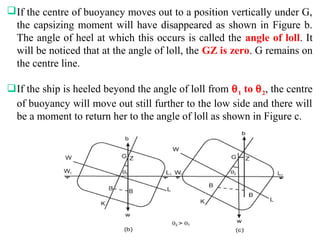
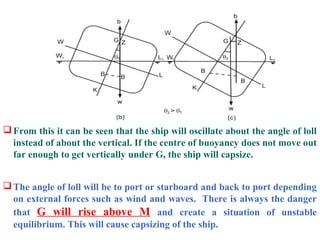
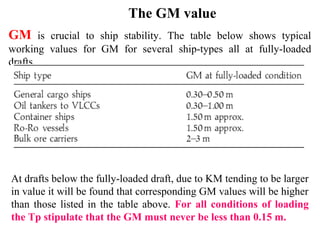
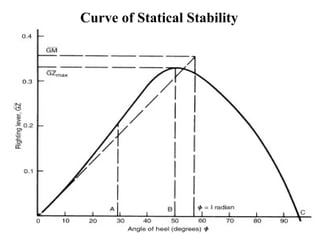
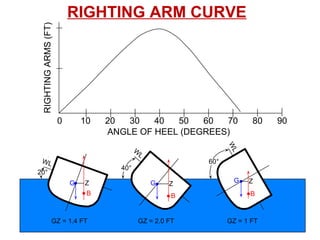
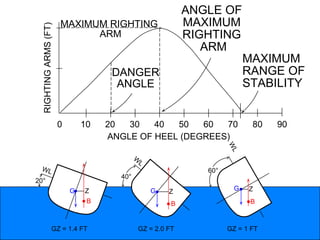
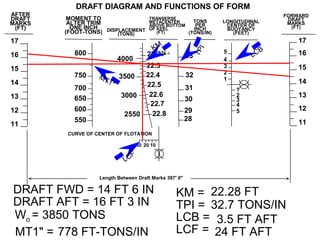
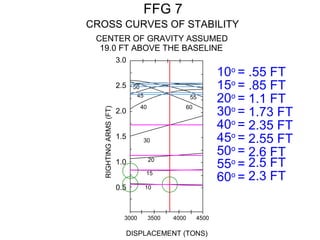
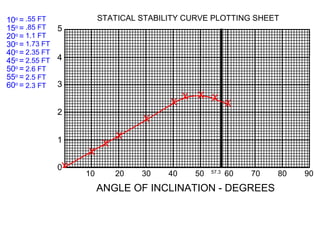

This document provides definitions and explanations of key concepts related to a ship's transverse stability. It discusses heel and list, stability reference points like the metacenter, center of buoyancy, and center of gravity. It introduces the stability triangle and explains positive, neutral, and negative stability. Key terms are defined, such as displacement, draft, and the laws of buoyancy. Graphs demonstrate concepts like the righting arm curve and how stability changes with angle of heel. The roles of factors like GM, GZ, and the angle of loll in capsizing are also summarized.






![[7] trim](https://cdn.slidesharecdn.com/ss_thumbnails/7trim-120403043947-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)