10
1. Camera Calibration
•Directな手法ではこの部分がかなり大事
– Indirectな手法では特徴抽出器・記述子は測光の変動に頑強性を
持つのでこの操作の大部分は無視することができる
– Geometric CalibrationとPhotometric Calibrationの2種類で
モデル化する
• Geometric Calibration
– よく知られたピンホールカメラモデル
– 3D点 𝑥, 𝑦, 𝑧 ∈ ℝ3
から画像点 𝑢 𝑑, 𝑣 𝑑 ∈ Ωへ
(投影関数であり, Π 𝑐 ∶ ℝ3 → Ω と表記)
(1)[1]
[1] J. Engel, V. Usenko, D. Cremers. A Photometrically Calibrated Benchmark For Monocular Visual Odometry, In arXiv:1607.02555, 2016.
12.
11
1. Camera Calibration
–今回は歪みあり画像点 𝑢 𝑑, 𝑣 𝑑 から歪みなし画像点 𝑢 𝑢, 𝑣 𝑢 へ変換
– この点を三次元へ変換する際には以下の変換を行う
(逆投影関数であり, Π 𝑐
−1 ∶ ℝ × Ω → ℝ3 と表記)
– 今回のcalibrationはPTAM[2]の実装を使い,チェックボードを用
いることで [𝑓𝑥, 𝑓𝑦, 𝑐 𝑥, 𝑐 𝑦, 𝜔]を推定
[1] J. Engel, V. Usenko, D. Cremers. A Photometrically Calibrated Benchmark For Monocular Visual Odometry, In arXiv:1607.02555, 2016.
[2] G. Klein and D. Murray. Parallel tracking and mapping for small AR workspaces. In International Symposium on Mixed and Augmented Reality (ISMAR), 2007.
(2,3) [1]
19
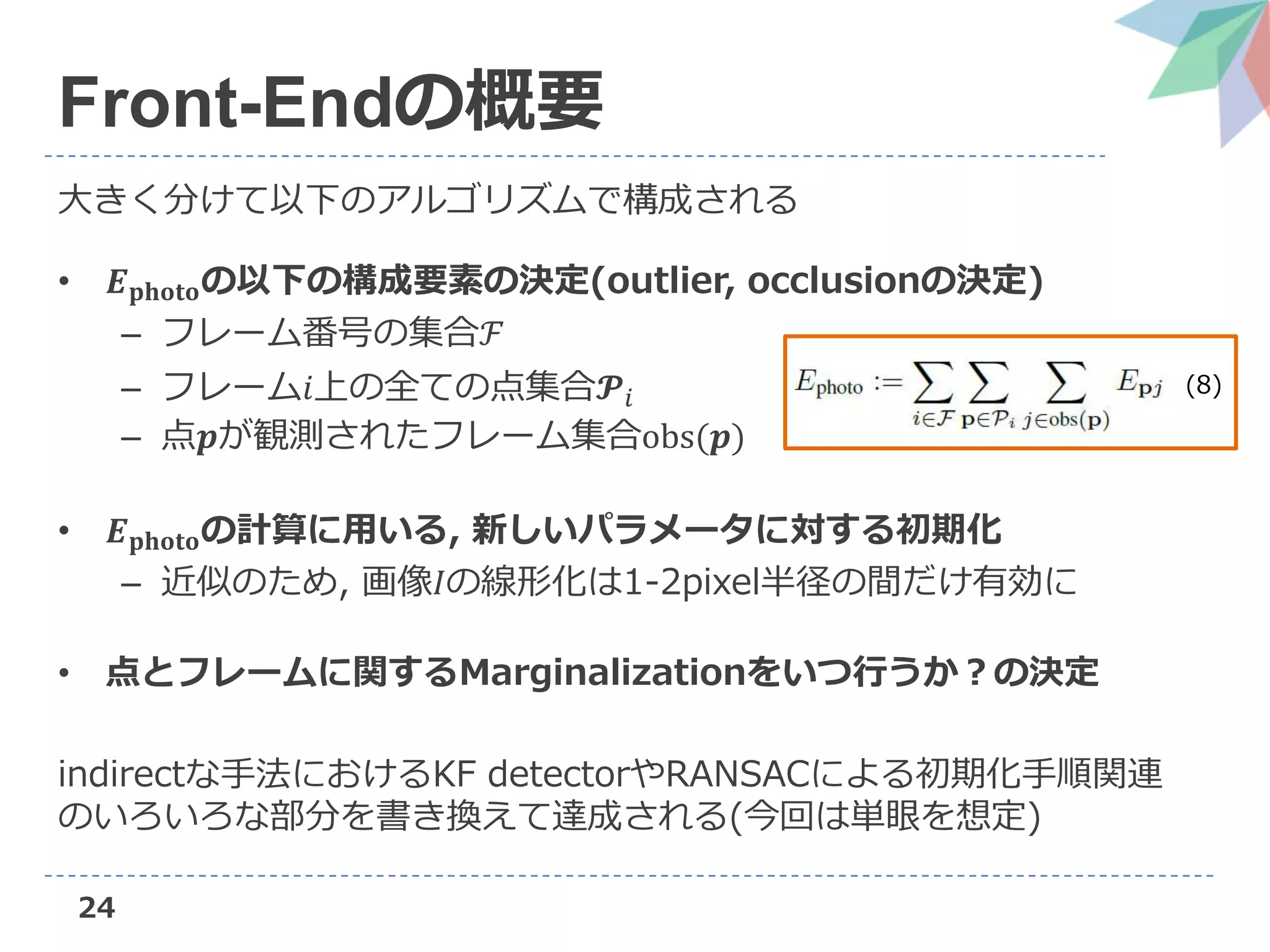
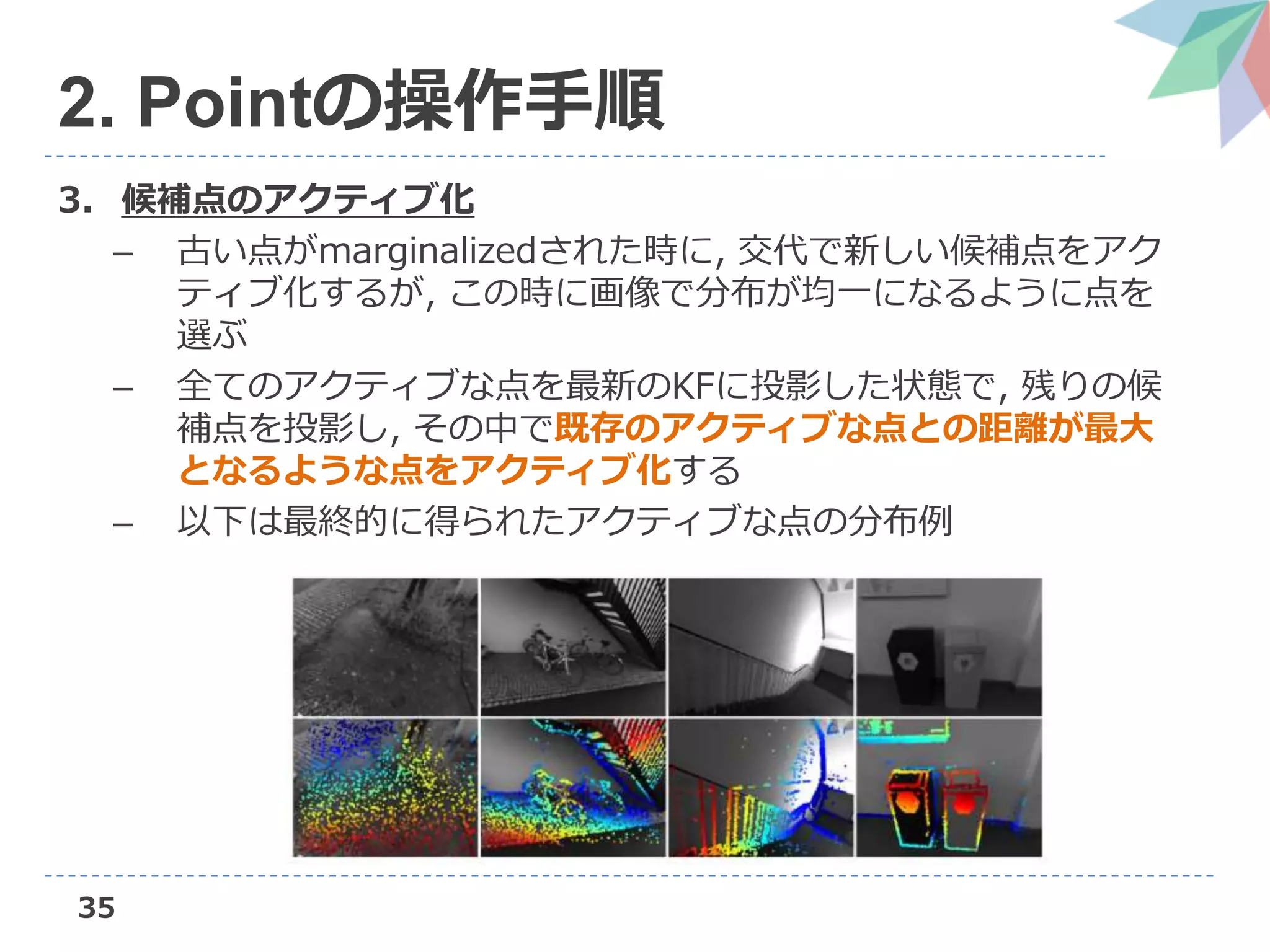
3. Windowベースの最適化
• Jacob行列𝐽𝑘の定義
– Gauss-Newton法において𝒙を動かす方向(勾配を降りる)となる
– Jacob行列は𝛿geo = 𝐓𝑖, 𝐓𝑗, 𝑑, 𝒄 , 𝛿photo = (𝑎𝑖, 𝑎𝑗, 𝑏𝑖, 𝑏𝑗)で分割
– これにより以下2つの近似を行うことができる
• First Estimate Jacobians [4]による安定性の確保?
– 𝐽geo, 𝐽photoは𝒙に対してsmoothな空間になっている
• 𝐽geoは𝒩𝑝全体で等しくなるので中央画素だけ計算する(削減)
(12)
(13)
[4] G. P. Huang, A. I. Mourikis, and S. I. Roumeliotis. A first-estimates Jacobian EKF for improving SLAM consistency. In International Symposium on Experimental Robotics, 2008.
6
57
参考文献
• J. Engel,V. Koltun, D. Cremers. Direct sparse odometry. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 2017.
- 本論文
• J. Engel, V. Usenko, D. Cremers. A Photometrically Calibrated Benchmark For
Monocular Visual Odometry, In arXiv:1607.02555, 2016.
- Photometric Calibrationの詳細(本スライド引用[1])
• E. Ethan. Gauss-Newton / Levenberg-Marquardt optimization. 2013.
- Gauss-Newton法の説明資料(本スライド引用[5])
• B. Jose-Luis. A tutorial on se (3) transformation parameterizations and on-m
anifold optimization. University of Malaga, 2010.
- CVにおけるLie代数の説明資料(本スライド引用[3])
• 岡谷貴之, et al. バンドルアジャストメント. 研究報告コンピュータビジョンとイ
メージメディア (CVIM), 2009, 2009.37: 1-16.
- BAの最適化に関する入門資料(本スライド引用[6])
• B. Simon, I. MATTHEWS. Lucas-Kanade 20 Years On: A Unifying Framewor
k. International journal of computer vision, 2004, 56.3: 221-255.
- DirectなSLAMの最適化に使われるLucas-Kanade法の説明資料(Gauss-Ne
wton法, Levenberg-Marquardt法の部分が参考になった)


![6
Contribution
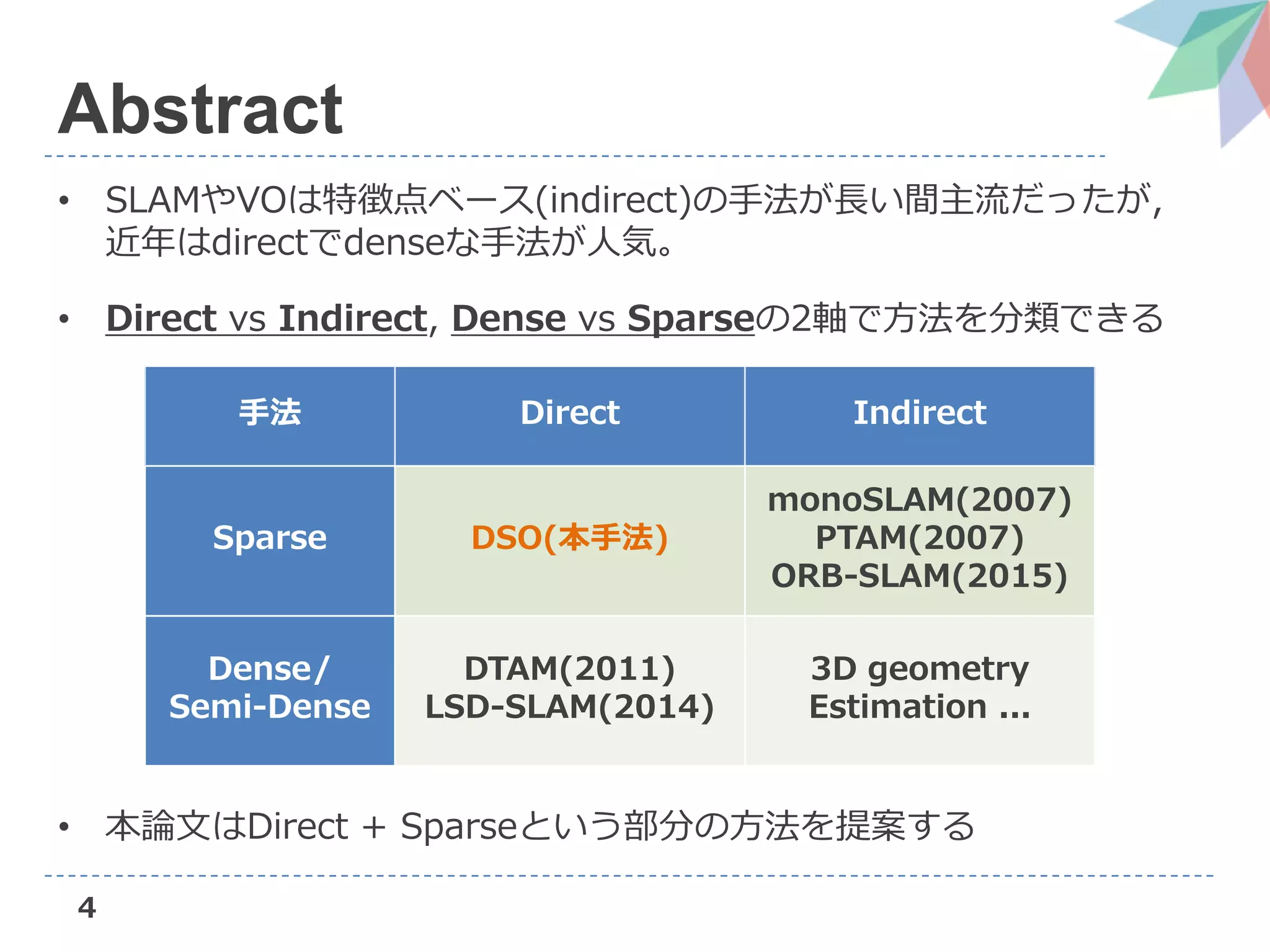
• 全てのモデルパラメータの完全尤度の最適化は一般的にDirectな手
法で行われているため, Direct + Sparseな手法を提案
– Cameraの位置, 内部パラメータ, および幾何学パラメータ等
• 最適化はsliding windowベースで行い, 古いカメラの位置は除外
• 既存の手法と異なり, カメラのphotometric calibrationを十分に
活用することで正確さと頑強性を向上させる
• CPUベースの実装であり, かつLSD-SLAM[1]と同じ密度のモデルを
作りながら, 既存の手法を上回る精度と頑強性 + 5倍の速さ
[1] J. Engel, T. Schops, and D. Cremers. LSD-SLAM: Largescale direct monocular SLAM. In European Conference on Computer Vision (E
CCV), 2014.](https://image.slidesharecdn.com/directsparseodometry-180113103145/75/Direct-Sparse-Odometry-7-2048.jpg)


![10
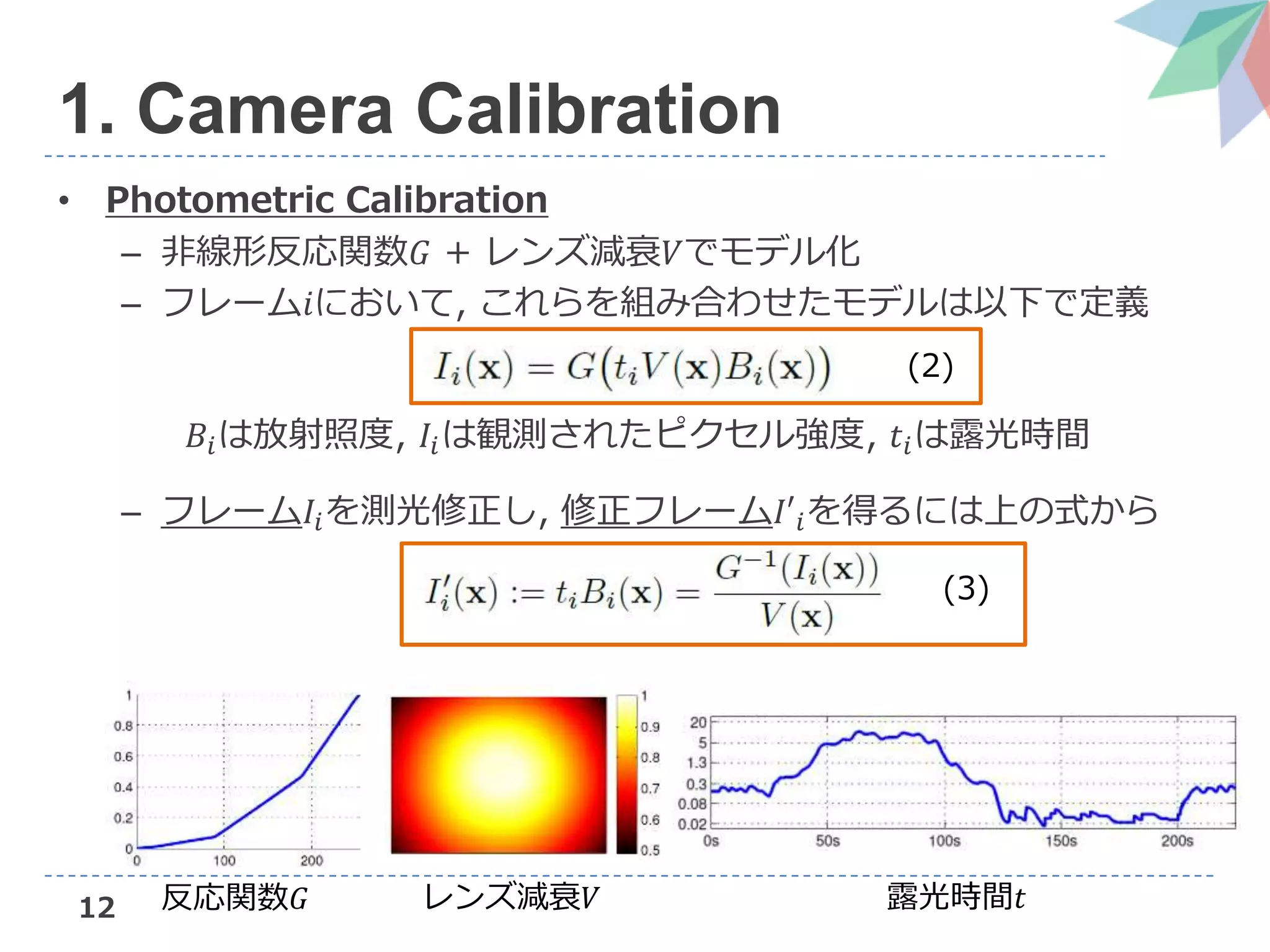
1. Camera Calibration
• Directな手法ではこの部分がかなり大事
– Indirectな手法では特徴抽出器・記述子は測光の変動に頑強性を
持つのでこの操作の大部分は無視することができる
– Geometric CalibrationとPhotometric Calibrationの2種類で
モデル化する
• Geometric Calibration
– よく知られたピンホールカメラモデル
– 3D点 𝑥, 𝑦, 𝑧 ∈ ℝ3
から画像点 𝑢 𝑑, 𝑣 𝑑 ∈ Ωへ
(投影関数であり, Π 𝑐 ∶ ℝ3 → Ω と表記)
(1)[1]
[1] J. Engel, V. Usenko, D. Cremers. A Photometrically Calibrated Benchmark For Monocular Visual Odometry, In arXiv:1607.02555, 2016.](https://image.slidesharecdn.com/directsparseodometry-180113103145/75/Direct-Sparse-Odometry-11-2048.jpg)
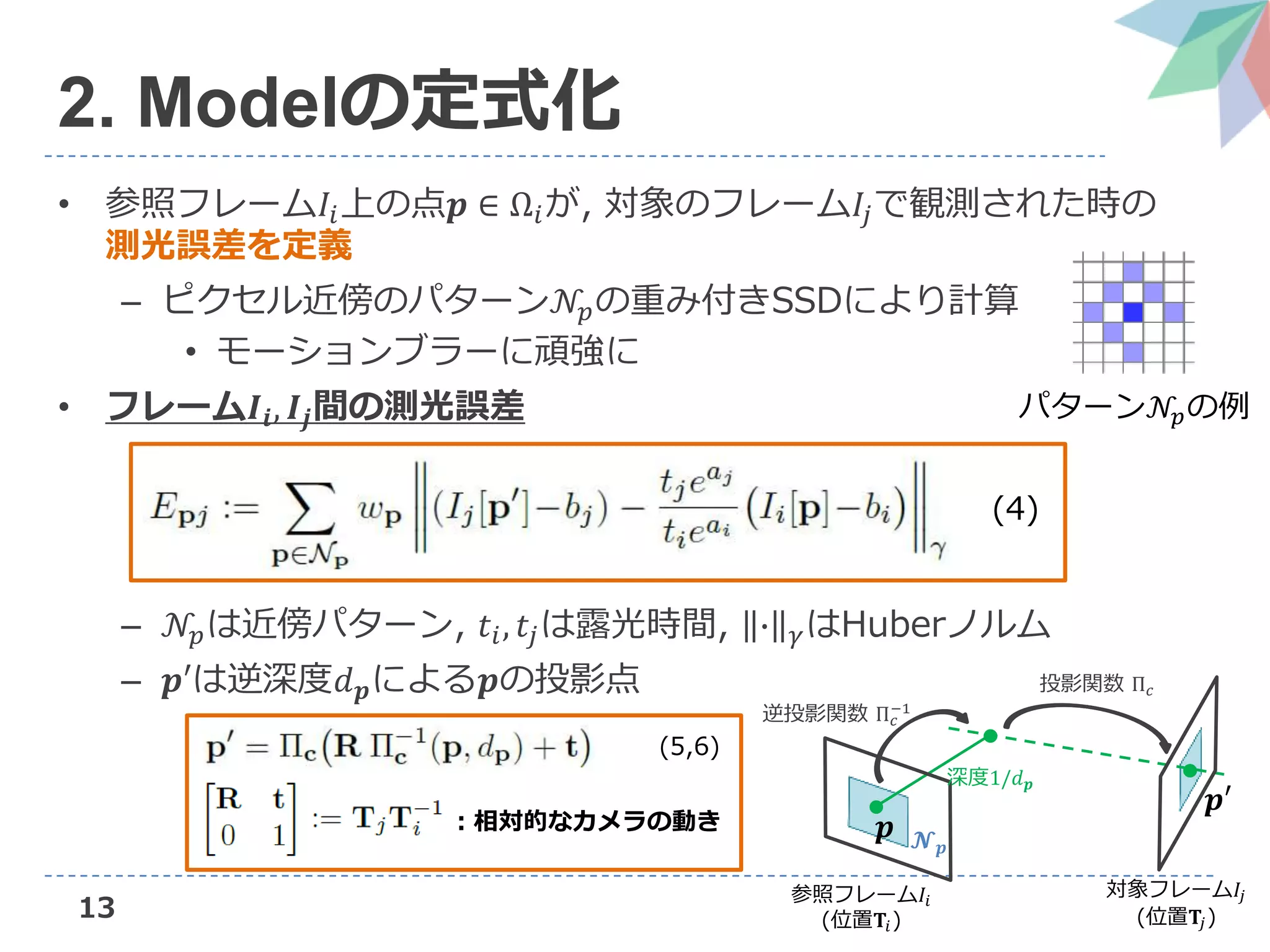
![11
1. Camera Calibration
– 今回は歪みあり画像点 𝑢 𝑑, 𝑣 𝑑 から歪みなし画像点 𝑢 𝑢, 𝑣 𝑢 へ変換
– この点を三次元へ変換する際には以下の変換を行う
(逆投影関数であり, Π 𝑐
−1 ∶ ℝ × Ω → ℝ3 と表記)
– 今回のcalibrationはPTAM[2]の実装を使い,チェックボードを用
いることで [𝑓𝑥, 𝑓𝑦, 𝑐 𝑥, 𝑐 𝑦, 𝜔]を推定
[1] J. Engel, V. Usenko, D. Cremers. A Photometrically Calibrated Benchmark For Monocular Visual Odometry, In arXiv:1607.02555, 2016.
[2] G. Klein and D. Murray. Parallel tracking and mapping for small AR workspaces. In International Symposium on Mixed and Augmented Reality (ISMAR), 2007.
(2,3) [1]](https://image.slidesharecdn.com/directsparseodometry-180113103145/75/Direct-Sparse-Odometry-12-2048.jpg)
![17
3. Windowベースの最適化
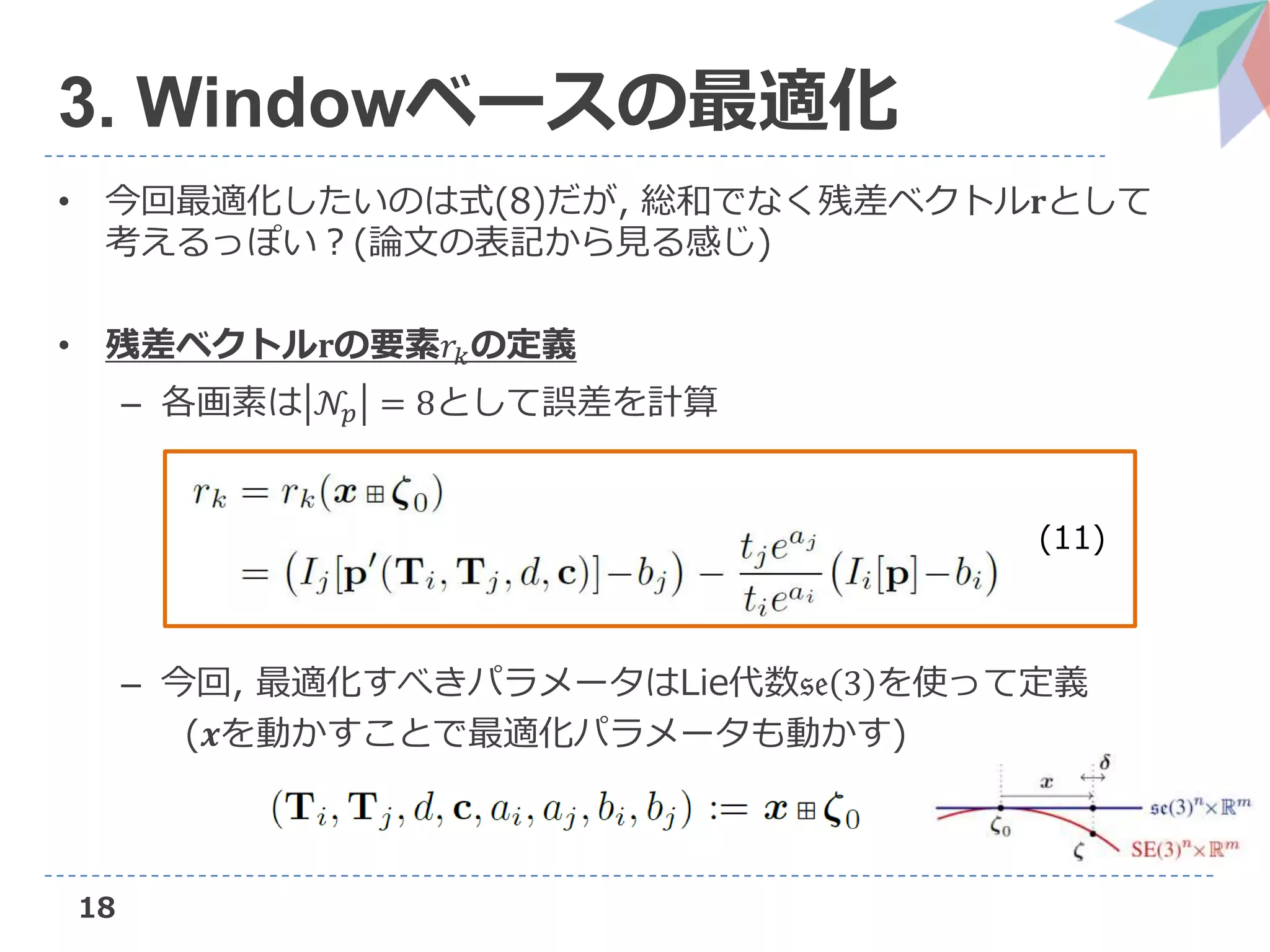
• 式(8)をsliding windowでGauss-Newton法を使うことで最適化
– 速度と柔軟さで良い性能を持つ
• [定義] 表記としてLie代数 𝔰𝔢 3 とLie群 SE(3)を用いる(詳細は[3])
– パラメータ 𝒙 ∈ 𝔰𝔢 3 𝑛 × ℝ 𝑚 とその行列表記 𝜁 ∈ SE 3 𝑛 × ℝ 𝑚
互いの空間の写像は
exp: 𝔰𝔢 3 ↦ SE 3 , log: SE(3) ↦ 𝔰𝔢(3)
– 演算子⊞: 𝔰𝔢 3 × SE(3) → SE(3)
直接パラメータから行列表記を更新する演算子
𝜁 = 𝒙 ⊞ 𝜁0 ≡ 𝑒 𝑥 ⋅ 𝜁0
• 接ベクトル空間(パラメータ空間)を動かし最適化
– Gauss-Newton法で𝛿ずつ動かす
[3] B. Jose-Luis. A tutorial on se (3) transformation parameterizations and on-manifold optimization. University of Malaga, 2010.](https://image.slidesharecdn.com/directsparseodometry-180113103145/75/Direct-Sparse-Odometry-18-2048.jpg)
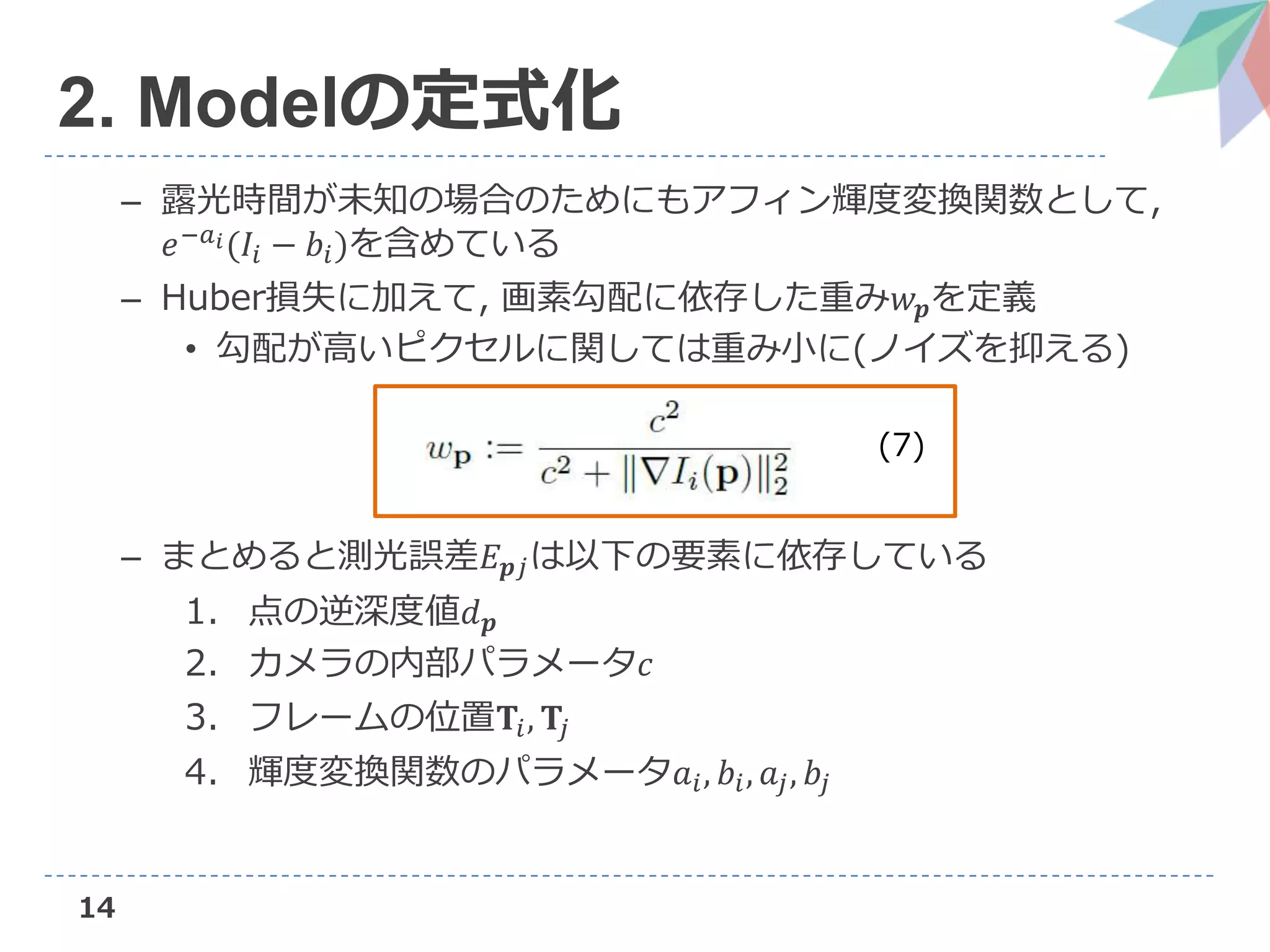
![19
3. Windowベースの最適化
• Jacob行列𝐽 𝑘の定義
– Gauss-Newton法において𝒙を動かす方向(勾配を降りる)となる
– Jacob行列は𝛿geo = 𝐓𝑖, 𝐓𝑗, 𝑑, 𝒄 , 𝛿photo = (𝑎𝑖, 𝑎𝑗, 𝑏𝑖, 𝑏𝑗)で分割
– これにより以下2つの近似を行うことができる
• First Estimate Jacobians [4]による安定性の確保?
– 𝐽geo, 𝐽photoは𝒙に対してsmoothな空間になっている
• 𝐽geoは𝒩𝑝全体で等しくなるので中央画素だけ計算する(削減)
(12)
(13)
[4] G. P. Huang, A. I. Mourikis, and S. I. Roumeliotis. A first-estimates Jacobian EKF for improving SLAM consistency. In International Symposium on Experimental Robotics, 2008.
6](https://image.slidesharecdn.com/directsparseodometry-180113103145/75/Direct-Sparse-Odometry-20-2048.jpg)
![20
3. Windowベースの最適化
• Gauss-Newton法による最適化
1. パラメータ𝒙の更新(何をやっているかは[5]が参考になる)
1. First Estimate Jacobiansにより𝒙 = 0からスタート
2. 式(11),式(12)からパラメータ𝒙における以下の要素を計算
3. 上式から𝒙から勾配を降りる幅𝜹を計算
4. パラメータ𝒙を更新する
(式(12)を 𝜹 + 𝒙 ⊞ 𝜻0 ⟶ 𝜹 ⊞ (𝒙 ⊞ 𝜻0)にした場合は次式)
2. 行列表記𝜻0の更新
上の1iterationが終わったら, Marginalizationの項でない変数
を更新し, 𝒙 = 0からスタートできるようにする
(10)
(14)
[5] E. Ethan. Gauss-Newton / Levenberg-Marquardt optimization. 2013.](https://image.slidesharecdn.com/directsparseodometry-180113103145/75/Direct-Sparse-Odometry-21-2048.jpg)
![21
3. Windowベースの最適化
• Marginalizationの方法
– 変数が増加し過ぎるとヤバいのでHessianの疎な構造に影響を与
える古い変数を除外する
– フレーム𝑖を除外する時にはまず最新の2枚のKFで観測されない
点を除外してから, 残りの点を除外する
– 手順としては以下(何をやっているかは[6]が参考になる)
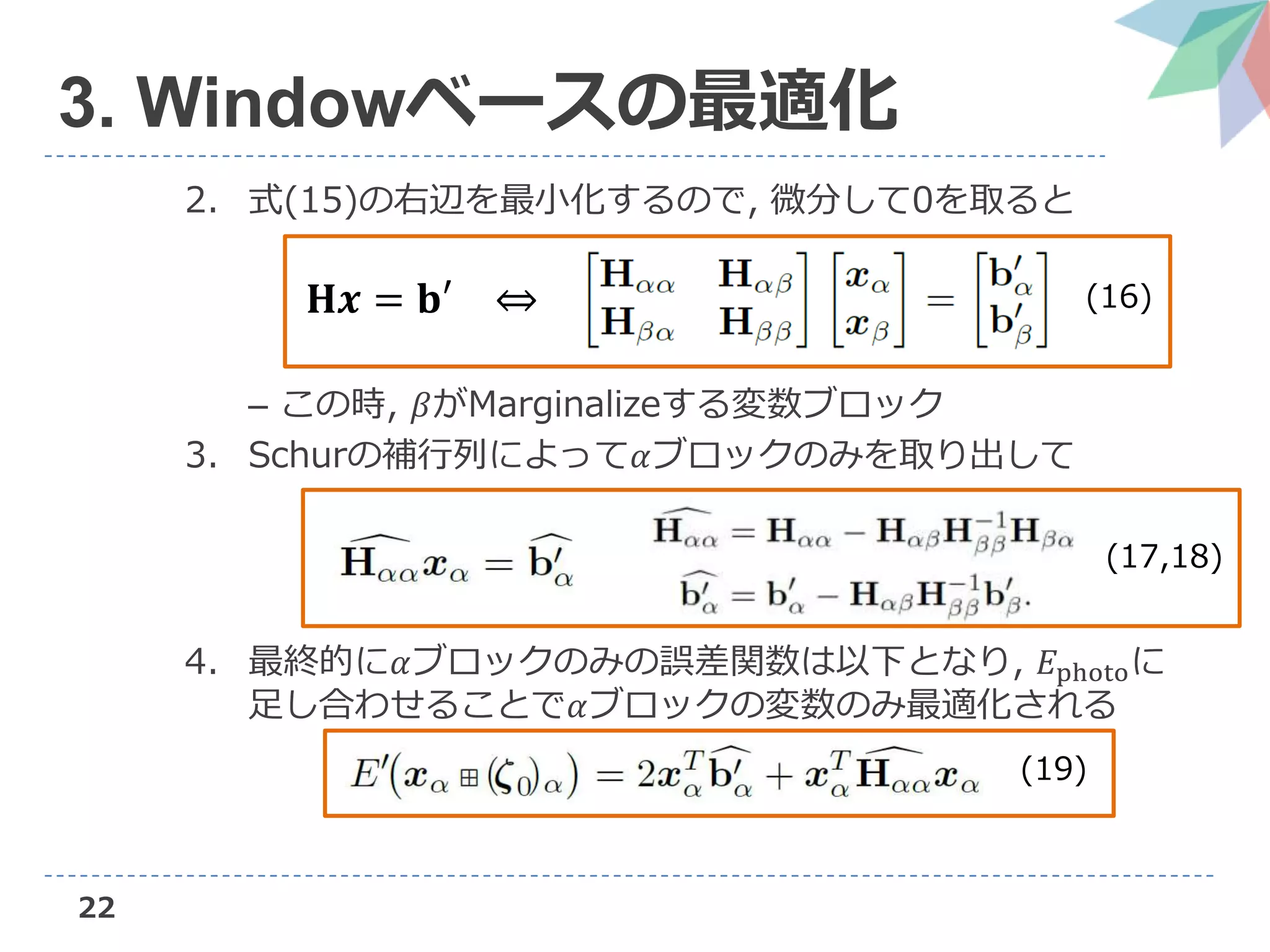
1. Marginalizeする変数を全て含んだ誤差関数𝐸′を展開
– 𝐇 や bに関しては前ページで定義したもの.
(15)
[6] 岡谷貴之, et al. バンドルアジャストメント. 研究報告コンピュータビジョンとイメージメディア (CVIM), 2009, 2009.37: 1-16.](https://image.slidesharecdn.com/directsparseodometry-180113103145/75/Direct-Sparse-Odometry-22-2048.jpg)

![57
参考文献
• J. Engel, V. Koltun, D. Cremers. Direct sparse odometry. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 2017.
- 本論文
• J. Engel, V. Usenko, D. Cremers. A Photometrically Calibrated Benchmark For
Monocular Visual Odometry, In arXiv:1607.02555, 2016.
- Photometric Calibrationの詳細(本スライド引用[1])
• E. Ethan. Gauss-Newton / Levenberg-Marquardt optimization. 2013.
- Gauss-Newton法の説明資料(本スライド引用[5])
• B. Jose-Luis. A tutorial on se (3) transformation parameterizations and on-m
anifold optimization. University of Malaga, 2010.
- CVにおけるLie代数の説明資料(本スライド引用[3])
• 岡谷貴之, et al. バンドルアジャストメント. 研究報告コンピュータビジョンとイ
メージメディア (CVIM), 2009, 2009.37: 1-16.
- BAの最適化に関する入門資料(本スライド引用[6])
• B. Simon, I. MATTHEWS. Lucas-Kanade 20 Years On: A Unifying Framewor
k. International journal of computer vision, 2004, 56.3: 221-255.
- DirectなSLAMの最適化に使われるLucas-Kanade法の説明資料(Gauss-Ne
wton法, Levenberg-Marquardt法の部分が参考になった)](https://image.slidesharecdn.com/directsparseodometry-180113103145/75/Direct-Sparse-Odometry-58-2048.jpg)













![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]YOLOv4: Optimal Speed and Accuracy of Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/200515dlseminar-200515082345-thumbnail.jpg?width=640&height=640&fit=bounds)






![SSII2020 [O3-01] Extreme 3D センシング](https://cdn.slidesharecdn.com/ss_thumbnails/200612-ssii-extreme3dsensing-print3-200608114658-thumbnail.jpg?width=640&height=640&fit=bounds)















![論文読み会@AIST (Deep Virtual Stereo Odometry [ECCV2018])](https://cdn.slidesharecdn.com/ss_thumbnails/dvsoslideshare-181104042256-thumbnail.jpg?width=640&height=640&fit=bounds)



