More Related Content
Similar to Evaluating the effect of rotor-driven yaw control on2 (20)
Evaluating the effect of rotor-driven yaw control on2
- 1. Evaluating the effect of rotor-driven yaw control on wind
turbine drivetrain loads
• In today’s world, wind turbines are one of the best
methods of harnessing renewable energy because of their
design simplicity and relevant efficiency. It produces
around 2 MW of power which enough to power around
2000 homes.
• Figure 1: Traditional Wind turbine
• To protect the gearbox bearings, large misalignments
on the order of 15° are tolerated before correcting
the yaw angle; this misalignment reduces efficiency.
• To close this gap of inefficiency, this project is
embarked.
Jay Bhatt, Dr. David Burris
University of DelawareIntroduction
Objectives
“The objective of this pilot is to demonstrate that
cyclic pitch control can be used for blade-driven
wind turbine yaw to significantly improve the
response to changes in wind direction while
significantly reducing drivetrain loads.”- Dr. Burris
Aims of this project include:
To demonstrate that cyclic pitch is a viable
means to control wind turbine yaw
To show that the use of cyclic pitch to
control yaw significantly decreases the non-
torque loads on the drivetrain, which have
implicated in premature bearing failure.
The Prototype
Conclusions/Results
References
Acknowledgements
• Ronald E. McNair scholars program
• Dr. Burris and his panel of graduate students
• Mr. Scott Nelson
• Bottasso, C. (2014). Cyclic pitch control for the reduction of ultimate loads on wind turbines. Journal of
Physics.Conference Series, 524(1)
• Boxwell, M. (2015). Wind turbines vs solar panels. Retrieved 7/19, 2015, from
http://solarelectricityhandbook.com/Solar-Articles/wind-turbines.html
• Boxwell, M. (2015). Wind turbines vs solar panels.http://solarelectricityhandbook.com/Solar-Articles/wind-
turbines.html
• Geyler, M., & Caselitz, P. (2007). Individual blade pitch control design for load reduction on large wind turbines.
European Wind Energy Conference (EWEC 2007), Milano, Italy, may, pp. 7-10.
• Kragh, K. (2014). Sensor comparison study for load alleviating wind turbine pitch control. Wind Energy
(Chichester, England), 17(12), 1891; 1891-1904; 1904.
• Larsen, T. J., Madsen, H. A., & Thomsen, K. (2005). Active load reduction using individual pitch, based on local
blade flow measurements. Wind Energy, 8(1), 67-80.
• Schlipf, D., Schuler, S., Grau, P., Allgöwer, F., & Kühn, M. (2010). Look-ahead cyclic pitch control using lidar.
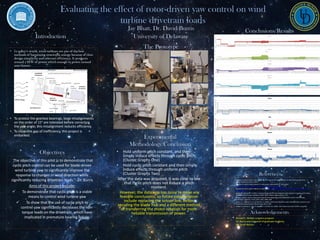
• Hold uniform pitch constant, and then
simply induce effects through cyclic pitch
(Cluster Graphs One)
• Hold cyclic pitch constant and then simply
induce effects through uniform pitch
(Cluster Graphs Two)
After the data was acquired, it was clear to see
that cyclic pitch does not induce a pitch
moment.
However, the data was too noisy to make any
feasible conclusions, so future consideration
include replacing the scissor link, better
securing the blade hub and a different method
of transferring the motor rotation for more
reliable transmission of power.
Experimental
Methodology/Conclusion
-150
-100
-50
0
50
100
150
200
250
time(s)
0.151
0.284
0.416
0.55
0.687
0.819
0.952
1.085
1.218
1.352
1.488
1.621
1.755
1.889
2.022
2.156
2.29
2.423
2.557
2.69
2.824
2.959
3.093
3.226
3.361
3.495
3.631
3.765
3.9
4.036
4.171
4.304
4.439
4.573
4.708
4.842
4.977
5.113
5.247
5.382
5.516
5.651
5.784
5.919
6.053
6.186
6.321
6.455
6.59
6.725
6.859
6.994
7.127
7.262
7.398
7.532
7.667
7.801
7.936
8.07
8.204
8.339
8.474
8.609
8.743
8.878
9.012
9.146
9.281
9.416
9.551
9.685
9.82
9.954
10.089
10.223
10.357
10.492
10.627
10.761
10.896
11.031
11.165
11.3
11.435
11.569
11.704
11.839
11.974
12.109
12.244
12.379
12.513
12.648
12.782
12.917
13.052
13.187
Pitch
Pitch
-100
0
100
200
time(s)
0.151
0.284
0.416
0.55
0.687
0.819
0.952
1.085
1.218
1.352
1.488
1.621
1.755
1.889
2.022
2.156
2.29
2.423
2.557
2.69
2.824
2.959
3.093
3.226
3.361
3.495
3.631
3.765
3.9
4.036
4.171
4.304
4.439
4.573
4.708
4.842
4.977
5.113
5.247
5.382
5.516
5.651
5.784
5.919
6.053
6.186
6.321
6.455
6.59
6.725
6.859
6.994
7.127
7.262
7.398
7.532
7.667
7.801
7.936
8.07
8.204
8.339
8.474
8.609
8.743
8.878
9.012
9.146
9.281
9.416
9.551
9.685
9.82
9.954
10.089
10.223
10.357
10.492
10.627
10.761
10.896
11.031
11.165
11.3
11.435
11.569
11.704
11.839
11.974
12.109
12.244
12.379
12.513
12.648
12.782
12.917
13.052
13.187
Yaw
Yaw
-4
-2
0
2
4
6
time(s)
0.148
0.276
0.405
0.534
0.667
0.796
0.925
1.054
1.183
1.313
1.443
1.574
1.704
1.834
1.963
2.093
2.223
2.352
2.482
2.612
2.742
2.872
3.002
3.132
3.262
3.392
3.523
3.654
3.785
3.916
4.048
4.179
4.308
4.439
4.569
4.7
4.83
4.961
5.093
5.223
5.354
5.484
5.615
5.745
5.875
6.006
6.135
6.265
6.396
6.527
6.657
6.788
6.918
7.049
7.179
7.31
7.441
7.572
7.703
7.833
7.964
8.094
8.224
8.355
8.485
8.616
8.747
8.878
9.008
9.139
9.27
9.4
9.531
9.662
9.792
9.923
10.053
10.184
10.314
10.445
10.575
10.706
10.837
10.967
11.098
11.229
11.36
11.49
11.621
11.752
11.883
12.013
12.145
12.275
12.406
12.537
12.668
12.798
12.929
13.06
Torque
Torque
-30
-20
-10
0
10
20
30
time(s)
0.151
0.284
0.416
0.55
0.687
0.819
0.952
1.085
1.218
1.352
1.488
1.621
1.755
1.889
2.022
2.156
2.29
2.423
2.557
2.69
2.824
2.959
3.093
3.226
3.361
3.495
3.631
3.765
3.9
4.036
4.171
4.304
4.439
4.573
4.708
4.842
4.977
5.113
5.247
5.382
5.516
5.651
5.784
5.919
6.053
6.186
6.321
6.455
6.59
6.725
6.859
6.994
7.127
7.262
7.398
7.532
7.667
7.801
7.936
8.07
8.204
8.339
8.474
8.609
8.743
8.878
9.012
9.146
9.281
9.416
9.551
9.685
9.82
9.954
10.089
10.223
10.357
10.492
10.627
10.761
10.896
11.031
11.165
11.3
11.435
11.569
11.704
11.839
11.974
12.109
12.244
12.379
12.513
12.648
12.782
12.917
13.052
13.187
Thrust
Thrust
-150
-100
-50
0
50
100
150
200
250
time(s)
0.0882
0.1736
0.262
0.3484
0.4354
0.5223
0.6083
0.6943
0.7803
0.8668
0.9523
1.0386
1.1252
1.211
1.2975
1.3872
1.4729
1.5594
1.6493
1.7358
1.8232
1.9133
1.9995
2.0868
2.1729
2.2604
2.3462
2.433
2.5197
2.6068
2.6929
2.7793
2.866
2.9525
3.0408
3.1278
3.2147
3.301
3.3877
3.4735
3.5598
3.6469
3.7349
3.823
3.9115
3.9983
4.0836
4.1723
4.2612
4.3479
4.4341
4.521
4.6083
4.6947
4.783
4.871
4.9572
5.0436
5.1305
5.2176
5.3037
5.3905
5.4774
5.5649
5.6513
5.7383
5.8254
5.9113
5.9999
6.0899
6.1797
6.27
6.3605
6.4508
6.541
6.6314
6.7208
6.811
6.9014
6.9916
7.0823
7.173
7.2633
7.354
7.444
7.5344
7.6245
7.7146
Pitch
-40
-20
0
20
40
60
80
100
time(s)
0.0882
0.1736
0.262
0.3484
0.4354
0.5223
0.6083
0.6943
0.7803
0.8668
0.9523
1.0386
1.1252
1.211
1.2975
1.3872
1.4729
1.5594
1.6493
1.7358
1.8232
1.9133
1.9995
2.0868
2.1729
2.2604
2.3462
2.433
2.5197
2.6068
2.6929
2.7793
2.866
2.9525
3.0408
3.1278
3.2147
3.301
3.3877
3.4735
3.5598
3.6469
3.7349
3.823
3.9115
3.9983
4.0836
4.1723
4.2612
4.3479
4.4341
4.521
4.6083
4.6947
4.783
4.871
4.9572
5.0436
5.1305
5.2176
5.3037
5.3905
5.4774
5.5649
5.6513
5.7383
5.8254
5.9113
5.9999
6.0899
6.1797
6.27
6.3605
6.4508
6.541
6.6314
6.7208
6.811
6.9014
6.9916
7.0823
7.173
7.2633
7.354
7.444
7.5344
7.6245
7.7146
Yaw
-2
-1
0
1
2
3
4
5
6
time(s)
0.0882
0.1736
0.262
0.3484
0.4354
0.5223
0.6083
0.6943
0.7803
0.8668
0.9523
1.0386
1.1252
1.211
1.2975
1.3872
1.4729
1.5594
1.6493
1.7358
1.8232
1.9133
1.9995
2.0868
2.1729
2.2604
2.3462
2.433
2.5197
2.6068
2.6929
2.7793
2.866
2.9525
3.0408
3.1278
3.2147
3.301
3.3877
3.4735
3.5598
3.6469
3.7349
3.823
3.9115
3.9983
4.0836
4.1723
4.2612
4.3479
4.4341
4.521
4.6083
4.6947
4.783
4.871
4.9572
5.0436
5.1305
5.2176
5.3037
5.3905
5.4774
5.5649
5.6513
5.7383
5.8254
5.9113
5.9999
6.0899
6.1797
6.27
6.3605
6.4508
6.541
6.6314
6.7208
6.811
6.9014
6.9916
7.0823
7.173
7.2633
7.354
7.444
7.5344
7.6245
7.7146
Torque
-10
-8
-6
-4
-2
0
2
4
6
8
time(s)
0.0882
0.1736
0.262
0.3484
0.4354
0.5223
0.6083
0.6943
0.7803
0.8668
0.9523
1.0386
1.1252
1.211
1.2975
1.3872
1.4729
1.5594
1.6493
1.7358
1.8232
1.9133
1.9995
2.0868
2.1729
2.2604
2.3462
2.433
2.5197
2.6068
2.6929
2.7793
2.866
2.9525
3.0408
3.1278
3.2147
3.301
3.3877
3.4735
3.5598
3.6469
3.7349
3.823
3.9115
3.9983
4.0836
4.1723
4.2612
4.3479
4.4341
4.521
4.6083
4.6947
4.783
4.871
4.9572
5.0436
5.1305
5.2176
5.3037
5.3905
5.4774
5.5649
5.6513
5.7383
5.8254
5.9113
5.9999
6.0899
6.1797
6.27
6.3605
6.4508
6.541
6.6314
6.7208
6.811
6.9014
6.9916
7.0823
7.173
7.2633
7.354
7.444
7.5344
7.6245
7.7146
Thrust