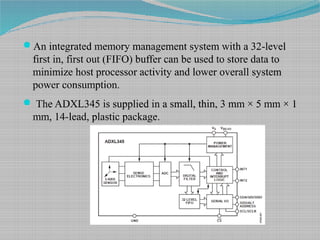
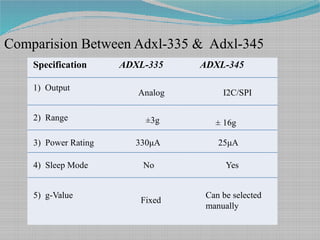
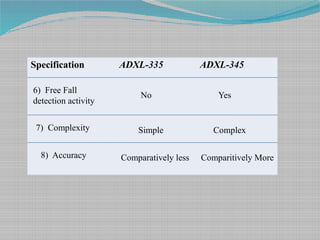
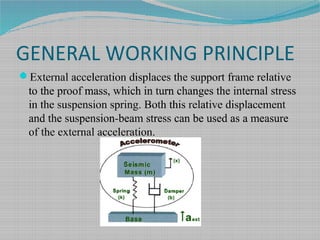
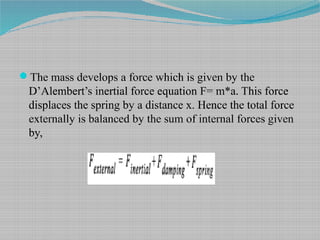
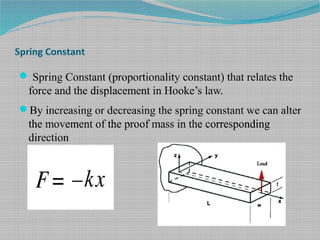
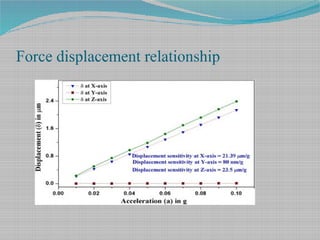
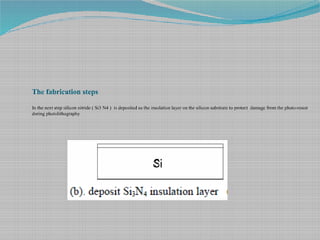
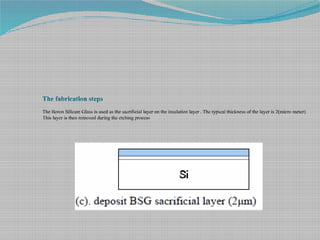
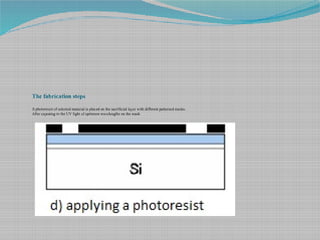
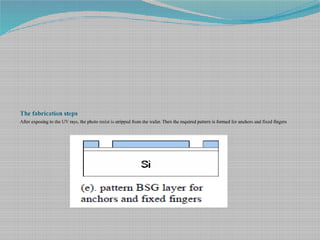
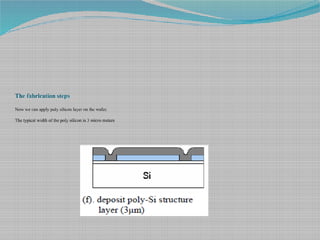
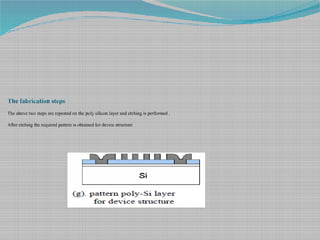
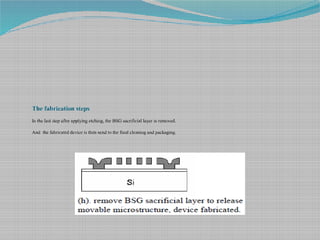
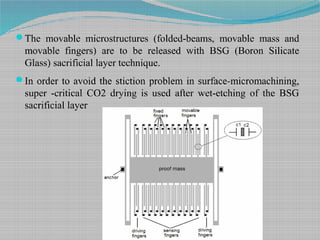
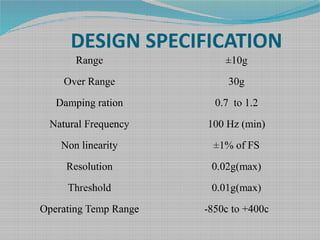
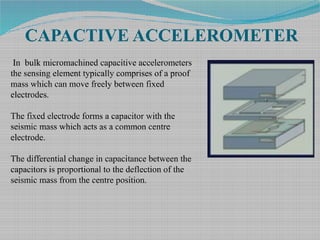
The document discusses MEMS capacitive accelerometers. It begins by introducing MEMS technology and materials used. It then explains that a MEMS capacitive accelerometer uses a movable proof mass suspended by beams between fixed electrodes, so that external acceleration causes the capacitance between electrodes to change proportionally. The document provides details on the working principles, fabrication process, design considerations like cross-axis sensitivity, and equations for capacitive variation and beam deflection under acceleration.


![Capacitive variation
C1 is the capacitance formed between the upper electrode
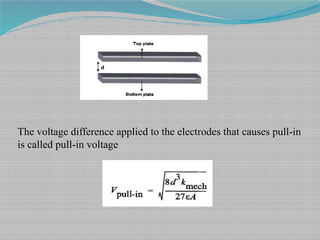
and the mass.C2 is the capacitance between the lower
electrode and the mass
C1=C2=C3 when the mass is at rest
With acceleration movement of the mass is like a fan and
the capacitance between the fixed electrode and movable
electrode can be found out by integration along the length
of the mass.
C1= ∫ εb2/(d0-A-B(x-a1)) dx C2=∫ εb2/(d0+A+B(x-a1)) dx
• The net change in capacitance can be found by finding C1-C2 and can be
expressed as
ΔC=C1-C2=C0(2A+(a2–a1)B)/d0[1+a2/d02]
The above equation has a linear and non linear part](https://image.slidesharecdn.com/acc-180506122818/85/MEMS-CAPACITIVE-ACCELEROMETER-41-320.jpg)
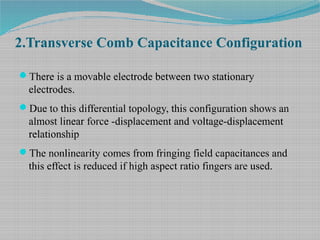
![Damping Analysis
The basic mechanism for micro mechanical
structures is squeeze film air damping.
Damping coefficient for a square mass can be
expressed in terms of the device dimensions in the
following form
Damping coefficient (c)=2[0.42µa24
/d03 ]
Natural Frequency and Damping Coefficient
d0=10
Beam
h1=90 , b1=240 , a1=600
Mass
h2=575, b2=4000, a2-a1=4000
Coventorware Analytical
Natural Frequency 842 Hz 854 Hz
Damping Coefficient 3.83 3.87](https://image.slidesharecdn.com/acc-180506122818/85/MEMS-CAPACITIVE-ACCELEROMETER-42-320.jpg)