Robotics ch 4 robot dynamics
•Download as PPTX, PDF•
1 like•1,444 views

1) The document discusses robot dynamics and defines equations for velocity and kinetic energy. 2) It presents equations to calculate the velocity of points on robot links using transformation matrices and derivatives with respect to joint variables. 3) Equations are provided to calculate the kinetic energy of elements of mass on robot links as a function of linear and angular velocities, allowing the total kinetic energy to be determined by summing over all links.

Recommended
More Related Content
What's hot
What's hot (20)
Similar to Robotics ch 4 robot dynamics
Similar to Robotics ch 4 robot dynamics (20)
More from Charlton Inao
More from Charlton Inao (20)
Recently uploaded
Recently uploaded (20)
Robotics ch 4 robot dynamics
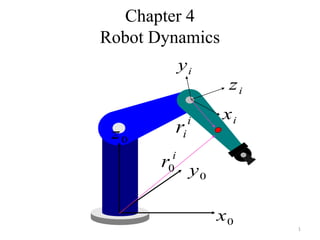
- 1. Chapter 4 Robot Dynamics i ir ix iy iz 0x 0z 0y i r0 1
- 2. Joint Velocity / Link velocity • The velocity of a point along a robot’s link can be defined by differentiating the position equation of the point, which is expressed by a frame relative to the robot’s base, . • Here, we will use the D-H transformation matrices , to find the velocity terms for points along the robot’s links. (1) • For a six-axis robot, this equation can be written as (2) P R T iA AAAATTTTT n321n 1n 3 2 2 1 1 R H R ...... AAAATTTTT 63216 5 3 2 2 1 1 0 6 0 ...... 2
- 3. Velocity of a link or joint • Referring to equation on lecture 11b slide #9, we see that the derivative of an matrix for revolute joint with respect to its joint variable is (3) i iA 1000 dCS0 SaSCCCS CaSSCSC iii iiiiiii iiiiiii ii iA 1000 0C00 CaSSCSC SaSCCCS i iiiiiii iiiiiii 3
- 4. Velocity of a link or joint • However, this matrix can be broken into a constant matrix and the matrix such that (4) (4) iQ iA 1000 dCS0 SaSCCCS CaSSCSC X iii iiiiiii iiiiiii 1000 0C00 CaSSCSC SaSCCCS i iiiiiii iiiiiii 0000 0000 0001 0010 ii i i AQ A 4
- 5. Velocity of a link or joint • Similarly, the derivative of an matrix for a prismatic joint with respect to its joint variable is • which, as before, can be broken into a constant matrix and the matrix such that iQ iA 0000 1000 0000 0000 1000 dCS0 SaSCCCS CaSSCSC dd iii iiiiiii iiiiiii ii iA (6) iA 0000 1000 0000 0000 0000 1000 0000 0000 1000 dCS0 SaSCCCS CaSSCSC x iii iiiiiii iiiiiii (7) 5
- 6. Velocity of a link or joint • In both equations (4) and (8), the matrices are always constant as shown and can be summarized as follows: iQ 0000 1000 0000 0000 prismaticQi )( (8) (9) ii i i AQ d A ,)( 0000 0000 0001 0010 revoluteQi 6
- 7. Velocity of a link or joint • Using , to represent the joint variables ( for revolute joints and for prismatic joints), and extending the same differentiation principle to the matrix of equation (2) with multiple joint variables ( and ), differentiated with respect to only one variable gives • Since is differentiated only with respect to one variable , there is only one . • Higher order derivatives can be formulated similarly from iq (10) ,..., 21 ,..., 21 dd s' sd' iq ,21 21 0 .... )....( ijj j ij j i ij AAQAA q AAAA q T U ij i 0 T jq jQ k ij ijk q U U (11) 7
- 8. Velocity of a link or joint • Using , to represent a point on link i of the robot relative to frame i we can express the position of the point by premultiplying the vector with the transformation matrix representing its frame: ir (12) (13) i ir ix iy iz 0x 0z 0y ip ii 0 ii R i rTrTp Same point w.r.t the base frame 1 z y x r i i i i A point fixed in link i and expressed w.r.t. the i-th frame 8
- 9. Velocity of a link or joint • Therefore, differentiating equation (12) with respect to all the joint variables yields the velocity of the point: (14) jq i 1j ijiji i 1j j j i 0 ii 0 i rqUrq q T rT dt d V )()()( The effect of the motion of joint j on all the points on link i 9
- 10. Velocity of a link or joint Example 4.4 • Find the expression for the derivative of the transformation of the fifth link of the Stanford Arm relative to the base frame with respect to the second and third joint variables. Solution • The Stanford Arm is a spherical robot, where the second joint is revolute and the third joint is prismatic. • Thus, 543215 0 AAAAAT 543221 2 5 0 52 AAAAQA T U 10
- 11. Velocity of a link or joint where and are defined in equation (9). Example 4.4 • Find an expression for of the Sanford Arm. Solution 6543216 0 AAAAAAT 543321 3 5 0 53 AAAQAA d T U 2Q 3Q 635U 6543321 3 6 0 63 AAAAQAA d T U 65543321 5 63 0 635 AAQAAQAA q T U 11
- 12. 12 Velocity of a link or joint X0 Y0 X1 Y1 1 L m 1 0 0 l r1 Example: One joint arm with point mass (m) concentrated at the end of the arm, link length is l , find the dynamic model of the robot using L-E method. Set up coordinate frame as in the figure ]0,0,8.9,0[ g 1 11 11 11 0 1 r 1000 0100 00CS 00SC rTp
- 13. 13 Velocity of a link or joint X0 Y0 X1 Y1 1 L m 1 1 1 111 0 111 0 11 0 0 Cl Sl qrTQrT dt d pV ..
- 15. Kinetic and potential energy Kinetic Energy • As you remember from your dynamics course, the kinetic energy of rigid body with motion in three dimensions is (Fig.1 (a)) where is the angular momentum of the body about G. G 2 h 2 1 Vm 2 1 K . Gh G (a) V G (b) Fig. 1 A rigid body in three-dimensional motion and in plane motion (1) 15
- 16. Kinetic and potential energy • The kinetic energy of rigid body in planar motion (Fig. 1 (b)) • The kinetic energy of the element of mass on link is • Since has three components of it can be written as matrix, and thus .22 I 2 1 Vm 2 1 K im dmzyx 2 1 dK 2 i 2 i 2 ii )( ... (2) (3) iV ,,, .. iii zyx 2 iiiii ii 2 iii iiii 2 i zyzxz zyyxy zxyxx ..... ..... ..... iii i i i T ii zyx z y x VV ... . . . (4) 16
- 17. Kinetic and potential energy and • Combining equations (14) and (3) yields the following equation for the kinetic of the element: where p and r represent the different joint numbers. • This allows us to add the contributions made to the final velocity of a point on any link I from other joints movements. 2 i 2 i 2 i zyx ... (4) (6) 2 iiiii ii 2 iii iiii 2 i T ii zyzxz zyyxy zxyxx TraceVVTrace ..... ..... ..... )( ,])).()(.)([( . i T i i 1r r iri i 1p p ipi dmr dt dq Ur dt dq UTrace 2 1 dK 17
- 18. Kinetic and potential energy i 1p rp T ir T iiip i 1r ii qqUdmrrUTr 2 1 dKK )( iiiiiii ii zzyyxx yzxz iiyz zzyyxx xy iixzxy zzyyxx iii i 2 iiiii iii 2 iii iiiii 2 i T iii mzmymxm zm 2 III II ymI 2 III I xmII 2 III dmdmzdmydmx dmzdmzdmzydmzx dmydmzydmydmyx dmxdmzxdmyxdmx dmrrJ 1 z y x r i i i i Center of mass dmx m x i i i 1 Pseudo-inertia matrix of link i •Integrating equation (6) and rearranging terms yields the total kinetic energy: (7) (8) 18
- 19. Kinetic and potential energy n 1i rp T iriip i 1r i 1p i qqUJUTr 2 1 K )( •Substituting equation (8) into equation (7) gives the form for kinetic energy of the robot manipulator: •The kinetic energy of the actuators can also be added to this equation. •Assuming that each actuator has an inertia of , the kinetic energy of the actuator is , and the total kinetic energy of the robot is (9) (10) )(actiI 2 iacti qI21 . )(/ n 1i 2 iacti n 1i rp T iriip i 1r i 1p i qI 2 1 qqUJUTr 2 1 K . )()( 19
- 20. Kinetic and potential energy )]([ ii 0T i n 1i n 1i i rTgmPP Potential Energy •The potential energy of the system is the sum of the potential energies of each link and can be written as where is the gravity matrix and is the location of the centre of mass of a link relative to the frame representing the link. matrix and position vector matrix. (11) ],,,[ oggggT ir 4X1gT 1X4rT ii 0 20
- 21. 21 Motion Equation of a Robot Manipulator
- 22. Motion equations of a robot manipulator The Lagrangian can now be differentiated in order to form the dynamic equations of motion. The final equations of the motion for a general multi- axis robot can be summarized as follows: (1) (2) (3) (4) 22
- 23. Motion equations of a robot manipulator In Equation (1), the first part is the angular acceleration- inertia terms, the second part is the actuator inertia term, the third part is the Coriolis and centrifugal terms and the last part is the gravity terms. This equation can be expanded for a six-axis revolute robot as follows: (4) 23
- 24. Motion equations of a robot manipulator Notice that in equation (4) there are two terms with . The two coefficients are and . To see what these terms look like, let’s calculate them for i=4. Form equation (3), for , we will have i = 4, j = 1, k = 2, n= 6, p = 4 and for , we have i = 4, j = 2, k= 1, n = 6, p = 4, resulting in (6) 21 21iD 12iD 512D 521D 24
- 25. Motion equations of a robot manipulator and from equation (6) we have (7) 25
- 26. Motion equations of a robot manipulator • In these equations, are the same. • The indices are only used to clarify the relationship with the derivatives. • Substituting the result from equation (7) into (6) show that • Clearly, the summation of the two similar terms yields the corresponding Coriolis acceleration term for . • This is true for all similar coefficient in equation (4). • Thus, we can simplify this equation for all joints as follows: (7) 21andQQ 521512 UU 21 26
- 27. Motion equations of a robot manipulator (8) (9) 27
- 28. Motion equations of a robot manipulator (10) (11) 28
- 29. Motion equations of a robot manipulator (12) (13) 29
- 30. Motion equations of a robot manipulator 30
- 31. Motion equations of a robot manipulator Example Using the aforementioned equations, derive the equations of the motion for the two-degree-of-freedom robot arm. The two links are assumed to be of equal length. 31
- 32. Motion equations of a robot manipulator Solution To use the equations of motion for the robot, we will first write the A matrices for the two links; the we will develop the terms for the robot. Finally, we substitute the result into equations (8) and (9) to get the final equation of the motion. The joint and the link parameters of the robot are iijkij DandDD ,,, 00lala0d0d 212121 ,,,,, 32
- 33. Motion equations of a robot manipulator 33
- 34. Motion equations of a robot manipulator 34
- 35. Motion equations of a robot manipulator 35
- 36. Motion equations of a robot manipulator From equation (8), assuming that products of inertia are zero, we have 36
- 37. Motion equations of a robot manipulator For a two-degree-of-freedom robot, robot, we get From equation (2), (3), and (4) we have (14) (14) 37
- 38. Motion equations of a robot manipulator 38
- 39. Motion equations of a robot manipulator ll 39
- 40. Motion equations of a robot manipulator Substituting the results into equations (14) and (14) gives the final equations of motion, which, except for the actuator inertia terms, are the same as equations (7) and (8) of L-E formulation. 40
Editor's Notes
- From equation (8), assuming that products of inertia are zero, we have