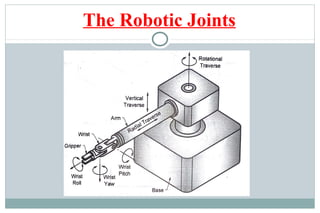
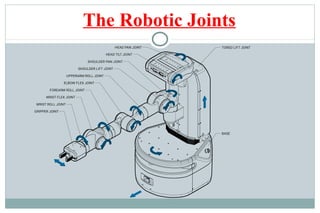
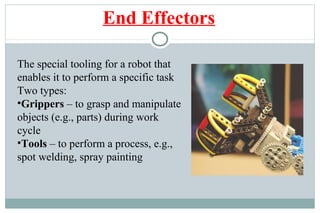
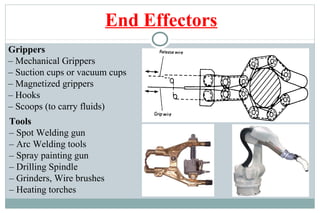
This document discusses robotic joints and end effectors. It explains that robotic joints allow relative movement between parts of a robot arm and enable the robot to move its end effector along a desired path. The basic joint movements are rotational, radial, and vertical. End effectors are the special tools that allow a robot to perform specific tasks, and can be grippers to grasp objects or tools to perform processes like welding or painting. Common grippers include mechanical grippers, suction cups, magnets, and hooks, while common tools are welding guns, drills, and sprayers.