
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Torque slip characteristics of im skerbala
Similar to Torque slip characteristics of im skerbala (20)
Recently uploaded
Recently uploaded (20)
Torque slip characteristics of im skerbala
- 1. Lecture 5: Third class Electrical Engineering Department College of Engineering University of Kerbala 2018/2019 By Assist Prof. Dr. Ali Altahir
- 2. Lecture Objectives 1- Thevenins theorem and its application. 2- Derivation of the expression for the gross torque developed as a function of slip (speed) of a three – phase induction motor. 3- Sketch the above characteristics of torque-slip (speed), explaining the various features. 4- Derive the expression of maximum torque and the slip (speed) at which it occurs. 5- Draw the above characteristics with the variation in rotor resistance.
- 3. Simple Review To understand Thevenin’s theorem and simplify I.M circuit into simple equivalent circuits using. Thevenin’s Theorem Academic Examples Some of Application Remember the three steps process: 1- Find the Thevenin Resistance by removing all voltage sources and load. 2- Find the Thevenin Voltage by reconnecting the voltage sources. 3- Use the Thevenin Resistance and Voltage to find the total current flowing through the load.
- 4. What is the Purpose of Thevenin Theorem? Q: Why Thevenin’s theorem is used? Thevenin's Theorem provides an easy method for analyzing power circuits, which typically has a load that changes value during the analysis process. This theorem provides an efficient way to calculate the voltage and current flowing across a load without having to recalculate your entire circuit over again. Thevenin’s theorem can be used to transform the network that is seen between points ‘a’ and ‘b’ into an equivalent voltage source Vth in series with equivalent impedance, i.e., Zth = Rth +jXth Approximate Equivalent Circuit for I.MThevenin Equivalent Circuitfor I.M
- 5. Thevenin’s Theorem Let us consider XM >> X1 and XM >> R1 That is, (Voltage Divider Rule) Exact Thevenin’s Impedance Approximate Thevenin’s Impedance Because, XM + X1 >> R1 and, XM >> X1 1 M TH M X V V X X 2 1 1 1 M TH M TH X R R X X X X 1 1( )/ /TH TH TH MZ R jX R jX jX
- 6. New Equivalent Circuit 1 1( ) M TH M jX V V R j X X 1 1( ) / /TH TH TH MZ R jX R jX jX 2 2 1 1 | | | | ( ) M TH M X V V R X X Applying voltage divider rule, it gives: Mechanical Load
- 7. Torque, Power and Thevenin’s Theorem The power converted to mechanical form (Pconv) measured in (kW) is: 2 2 2 2 2( ) TH TH T TH TH V V Z R R X X s I 2 2 2 (1 1 3 ) ( ) c Rn Lv Co s s P R s R I s And, the induced mechanical torque (𝜏𝑖𝑛𝑑) measured in (N.m) is: conv ind m P (1 ) conv s P s 2 2 2 (1 ) ( 3 1 ) (1 ) (1 )s s AG AG s s s s R I Ps s P Rotor Current measured in (A) is:
- 8. Derive mechanical induce Torque 2 2 2 22 2 3 ( ) th ind s th th V R sR R X X s 2 2 2 22 2 3 1 (N.m) ( ) th ind th th s R V s R R X X s , s = 00 as r sind Or, Prove That ? 1- At no-load 2- At blocked rotor 1 0 , s = 1asstart ind s r 3- 𝜏 𝑚𝑎𝑥 =? maxmax , sas r r
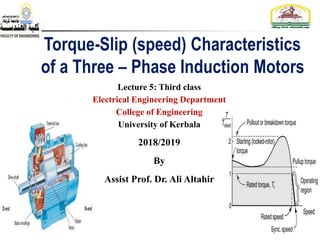
- 9. Torque-Speed Characteristics Typical torque-speed characteristics of three – phase induction motor
- 10. Short Comments 1. The mechanical induced torque is zero at corresponding synchronous speed (Why?). 2. The torque-speed curve is nearly linear varying between no-load and full load (Why?). Because, in this range, the rotor resistance is much greater than the rotor reactance, R2 >> X2, so the rotor current and induced torque increase linearly with the slip value. 3. There is a maximum mechanical torque that can’t be exceeded. This torque is called breakdown torque and it is amplitude bounded (2 – 3) times of the full-load torque.
- 11. Short Comments, Continue 4. The starting torque of the motor is slightly higher than its full-load torque, so the motor will start carrying any load, (How?), it can supply at full load. 5. The induced torque of the I.M for a given slip varies as the square of the applied voltage, Discuss this phrase? 6. If the rotor is driven faster than synchronous speed it will run as a induction generator I.G, that is converting mechanical power to electric power.
- 12. Torque Slip Characteristics of Induction Motor Ns > Nr Ns < Nr
- 13. Derive Maximum Slip? Maximum torque occurs when the power transferred to R2 /s is maximum (How?). As you know, the maximum torque condition occurs , iff R2 /s = ZT = Rth + j (Xth + X2) max 2 22 2( )th th T R R X X s max 2 2 2 2 Prove that?)( ( ) T th th R s R X X So, the slip factor corresponding to maximum torque is: Or, 𝒅𝝉 𝒅𝒔 =0 𝒔 𝑻 𝐦𝐚𝐱 Use + ve slip for motoring mode Use - ve slip for generating mode
- 14. 22max rtt r XXR R s 0 ds dT 0 /3 2 2 2 rt r t rt ms XXj s R R sRV ds d 2 2 2 /3 rt r t rt ms XXj s R R sRV T 22 2 max 2 3 rttt t ms XXRR V T Derive Maximum Torque?
- 15. Maximum Torque for Wound Rotor WRIM Rotor resistance can be increased by inserting external resistance in the rotor of a wound-rotor WRIM type. The value of the maximum torque remains unaffected. The operating speed corresponding to maximum torque can be controlled. What about the starting torque of three – phase WRIM?
- 16. Maximum Torque for Type WRIM Effect of increasing rotor resistance on torque-speed characteristic Q1: How torque – slip Curve vary when adding resistance to the rotor circuit? Q2: What is the condition for maximum starting torque of a 3 phase WRIM? Increase rotor resistance
- 17. Maximum Starting Torque of a three – Phase IM
- 18. Academic Example No.1 A two-pole, 50-Hz, three – phase induction motor supplies 15kW a load at rotor speed of 2950 rpm. Do as required: 1. What is the percentage motor’s slip at specified rotor speed ? 2. What is the mechanical induced torque measured in N.m under these conditions? 3. What will be the operating speed of the I.M, if its induced torque is doubled in this case? 4. How much the gross power that will be supplied by the I.M when the induced torque is doubled in this case?
- 19. Solution 1. 2. 120 120 50 3000 rpm 2 3000 2950 *100 1.67% * % 3000 100sync m sync e sync f n n P n s n 3 Note: Since, friction and windage losses are not given in this question: Let us consider that is, 15 10 48.6 N.m 2 2950 60 ind loacon d conv i v loa nd m d f W P P rpm P
- 20. Solution 3. In low-slip region, the torque - speed curve is linear and the induced torque is direct proportional to slip. So, if the induced torque is doubled, the new slip will also be doubled, i.e., 3.33% and the motor speed will be: (1 ) (1 0.0333) 3000 2900 rpmm syncn s n 4 ( 48.6) ( 2 2 2900 29) k.5 0 W 6 conv ind m pmP r
- 21. Academic Example No.2 A 460V, 25hp, 60Hz, four-pole, star connected wound-rotor three – phase induction motor WRIM has the following impedances measured in / ph. referred to the stator side circuit : R1 = 0.641 / ph. R2 = 0.332 / ph. X1 = 1.106 / ph. X2 = 0.464 / ph XM = 26.3 / ph. 1. Compute the maximum torque of this motor? At what corresponding motor speed and slip factor does it occur? 2. Calculate the starting torque of this motor? 3. If the rotor resistance is doubled, state the motor speed corresponding to the maximum torque now occur? What will be the new starting torque? 4. Sketch Torque -slip curve for both cases shown above. 5. Check the stability of the motor at 1750 and 1300 rpm?
- 22. Solution 2 22 2 1 1 460 26.3 3 255.2 V/ph. (0.641) (1.106 26.3)( ) th M MX V R X X V 1 2 2 1 26.3 (0.641) 0.590 1.106 26. . 3 / M th M X R X X ph R 1, 1.106 / .thX pA hnd X Note: To compute the maximum torque, it is necessary prepare Thevenin’s equivalent circuit :
- 23. Solution The slip factor corresponding to maximum mechanical torque is: 1. R2 /s = ZT = Rth + j (Xth + X2) The corresponding motor speed for maximum torque is: max 2 2 2 2 2 2 ( ) 0.332 0.198 1 (0.59) (1.106 0.464) th th R s R X X maxmax. (1 ) (1 0.198) 1800 1444 rpmm old syncn s n rpm
- 24. Solution The maximum mechanical induced torque at this speed is: 2 2 2 m 2 max ax 2 2 2 3 (255.2) 2 2 (18 31 (prove that? 00 )[0.59 (0.59) (1.106 0 ) 2 ( ) .464) ] 60 229 N.m th s th th th rpm V R R X X 2. The starting torque can be found from the torque equation by substituting, s = 1.
- 25. Solution 2 2 21 22 2 1 2 2 2 2 2 2 2 2 2 max. 3 1 ( ) 3 [ ( ) ] 3 (255.2) (0.332) 2 1800 [(0.59 0.332) (1.106 0.464) ] 60 104 N.m < th start ind s s th th s th s th th start R V s R R X X s V R R R X X rpm 5- At motor speed1750rpm,s =0.028 < 𝑠𝜏max = 0.396 I.M is stable At motor speed1000rpm,s = 0.444 > 𝑠𝜏max = 0.396 I.M is unstable
- 26. Solution 3. If the rotor resistance is doubled, consequently the slip at maximum torque is doubled for linear operation region. Note: Specify type of electrical connection related to insertion external rotor resistance? 4- The corresponding speed is: The maximum torque is still as it is: max = 229 N.m max 2 2 2 2 0.396 1 unitles 2 s ( ) * th th s R X X R maxmax. (1 ) (1 0.396) 1800 1087 rpm < 1444 rpmm new syncn s n rpm
- 27. Solution Now, the new starting torque can be computed, if the rotor resistance is doubled : 2 , 1 2 2 ,, 3 (255.2) 2 1800 [(0.59 0.664) (1.106 0.464) (0.664) 170 N.m ] 60 = 104 N.m>sta start new ind s start oldrt new rpm 4- Sketch Torque -slip curve for both cases shown above.
- 28. Review Questions Q1: What is the relation between torque and speed in induction motor? Q2: How torque is developed in a three phase induction motor? Q3: How can we increase the starting torque of an induction motor? Q4: How do you control the speed of a 3 phase induction motor? Q5: State maximum torque condition of a three – phase Induction Motor? Q6: What is full load torque in induction motor? Q7: How does an induction motor develop torque? Q8: Why a three phase induction motor is self starting? Q9: Why the slip is never zero in an induction motor? Q10: What are the effects of increasing rotor resistance on starting current and starting torque? Q11: Why induction motor has high starting torque? Q12: Which motor has a high starting torque?
- 29. Determination of Induction Motor Parameters Due to the similarity between the induction motor equivalent circuit and the transformer equivalent circuit, same tests are used to determine and extract the values of motor parameters. 1- DC test: That is used to determine the stator resistance , R1 2- No-load test: That is used to determine the rotational losses and magnetization current (similar to no-load test in low frequency transformers). 3- Locked-rotor test: That is used to determine the rotor and stator impedances, i.e., Z1 and Z2 (similar to short-circuit test in power transformers). Locked test ≡ blocked test in physical meaning.
- 30. 1- DC Test The purpose of the DC test is to determine stator resistance, R1. A variable DC voltage source is connected between two stator terminals. How: The DC source is adjusted to provide approximately rated stator current, and the resistance between the two stator terminals is determined from the voltmeter and ammeter readings.
- 31. 1- DC test Then If the stator is Y-connected, the per phase stator resistance is: If the stator is delta-connected, per phase stator resistance is: DC DC DC V R I 1 2 2* DC DC DC VR R I 1 3* *2 2 3 DC D DC C V R R I 1 1 1 1 1 1 2 2 2 3 1.5 DC DC R R R R R R R R 1, 1, 2 2 DC wye DC wye R R R R