This document summarizes key points from a lecture on induction motors:
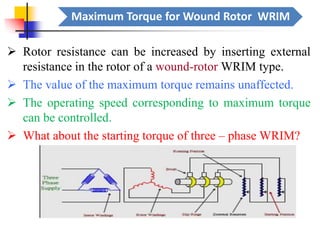
1. The lecture objectives were to discuss Thevenin's theorem and its applications to induction motor circuits, derive expressions for torque as a function of slip, and examine torque-slip characteristics with variations in rotor resistance.
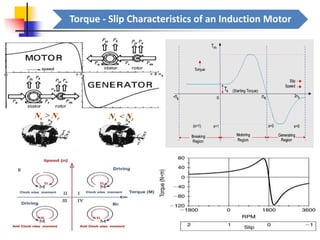
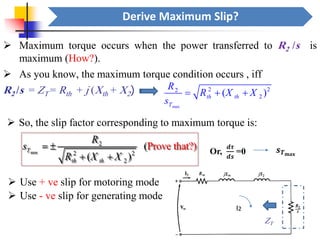
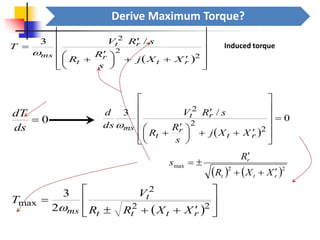
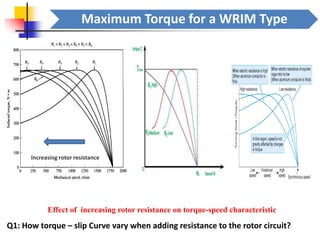
2. Thevenin's theorem was used to simplify induction motor circuits into equivalent circuits to analyze how torque varies with slip. Maximum torque occurs at a specific slip and decreases to zero as slip approaches zero.
3. Increasing the rotor resistance shifts the maximum torque point to lower slip but does not change the maximum torque value. This allows control of motor speed at maximum torque.
![Solution
➢ The maximum mechanical induced torque at this speed is:
2
2
2
m
2
max
ax 2 2
2
3 (255.2)
2
2 (18
31
(prove that?
00 )[0.59 (0.59) (1.106 0
)
2 ( )
.464) ]
60
229 N.m
th
s th th th
rpm
V
R R X X
=
+ +
=
+
=
+ +
+
2. The starting torque can be found from the induced torque
equation by substituting, s = 1.](https://image.slidesharecdn.com/thirdlectureofathree-phaseinductionmachine-200315180446/85/Third-lecture-of-a-three-phase-induction-machine-24-320.jpg)
![Solution
( )
2 2
21
22
2
1
2
2
2 2
2 2
2
2 2
max.
3
1
( )
3
[ ( ) ]
3 (255.2) (0.332)
1800 [(0.59 0.332) (1.106 0.464) ]
104 N.m
2
0
<
6
th
start ind s
s
th th
s
th
s th th
start
R
V
s
R
R X X
s
V R
R R X X
rpm
=
=
= =
+ + +
=
+ + +
=
+ + +
=
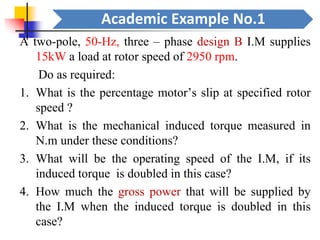
5- At motor speed, 1750rpm,s =0.028 < 𝑠𝜏max
= 0.396 I.M is stable
At motor speed,1000rpm,s = 0.444 > 𝑠𝜏max
= 0.396 I.M is unstable](https://image.slidesharecdn.com/thirdlectureofathree-phaseinductionmachine-200315180446/85/Third-lecture-of-a-three-phase-induction-machine-25-320.jpg)
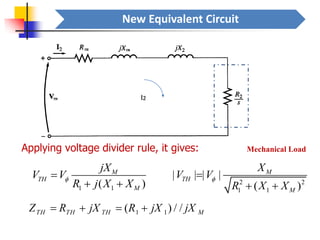
![Solution
Now, the new starting torque could be computed, in case the rotor
resistance is doubled :
2
,,
, 1
2 2
(0.664)
0.664
3 (255.2)
1800 [(0.59 ) (1.106
170 N.m
2
60
0.464) ]
= 104 N.m>st
start new in
art ne
d s
start oldw
rpm
=
= =
+ + +
=
4- Sketch Torque -slip curve for both cases shown above.](https://image.slidesharecdn.com/thirdlectureofathree-phaseinductionmachine-200315180446/85/Third-lecture-of-a-three-phase-induction-machine-27-320.jpg)