Downloaded 143 times
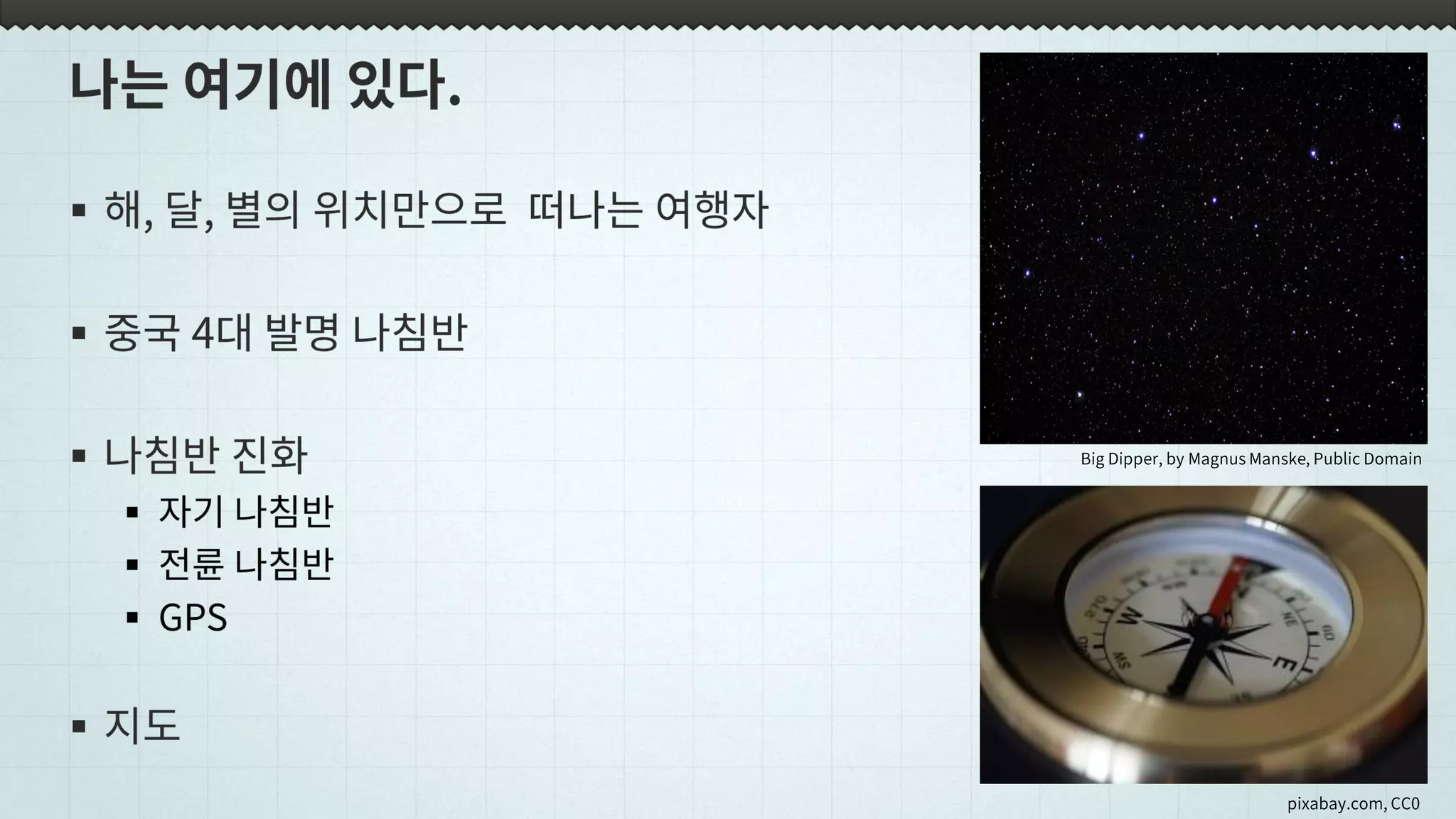
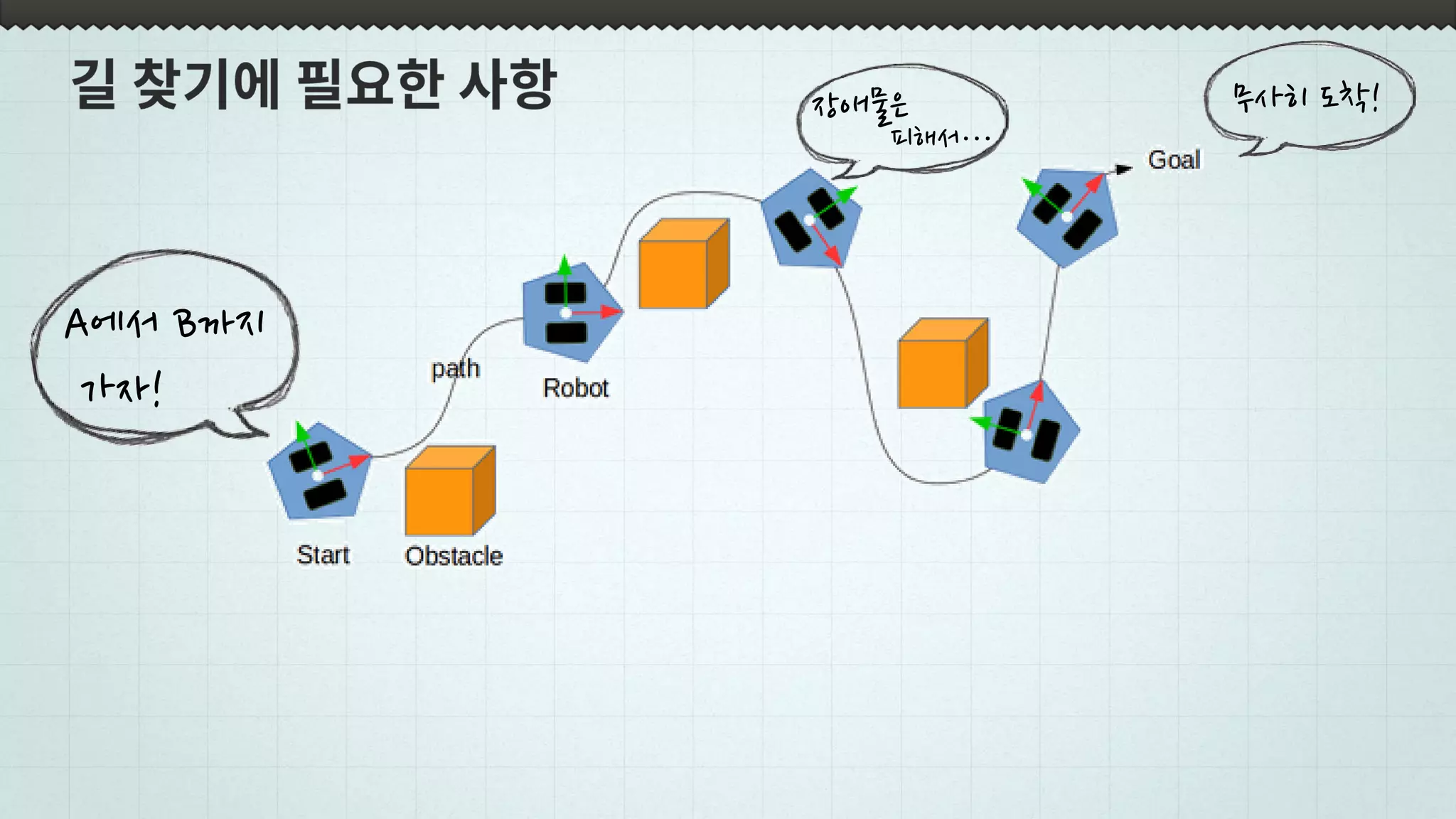


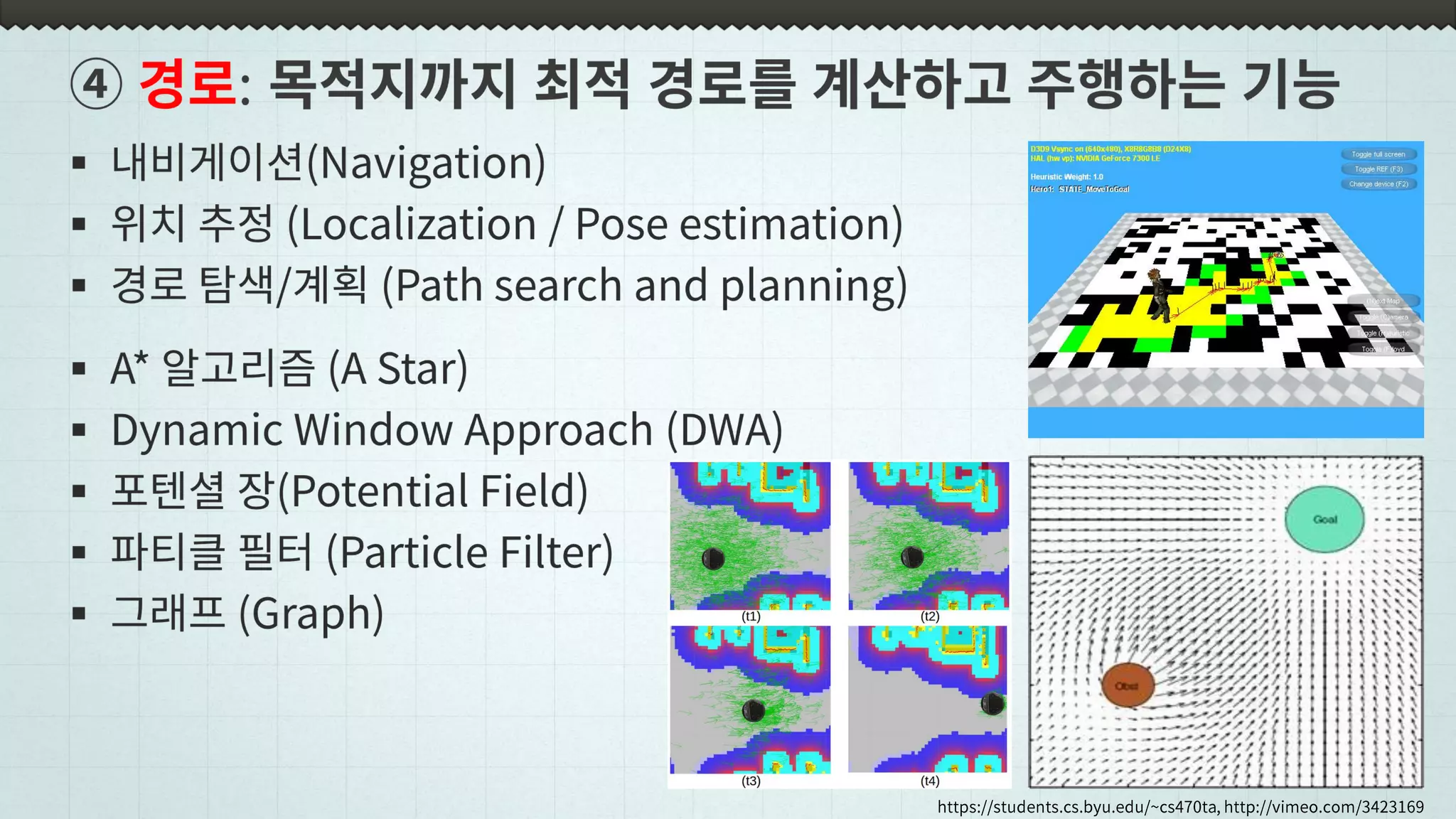
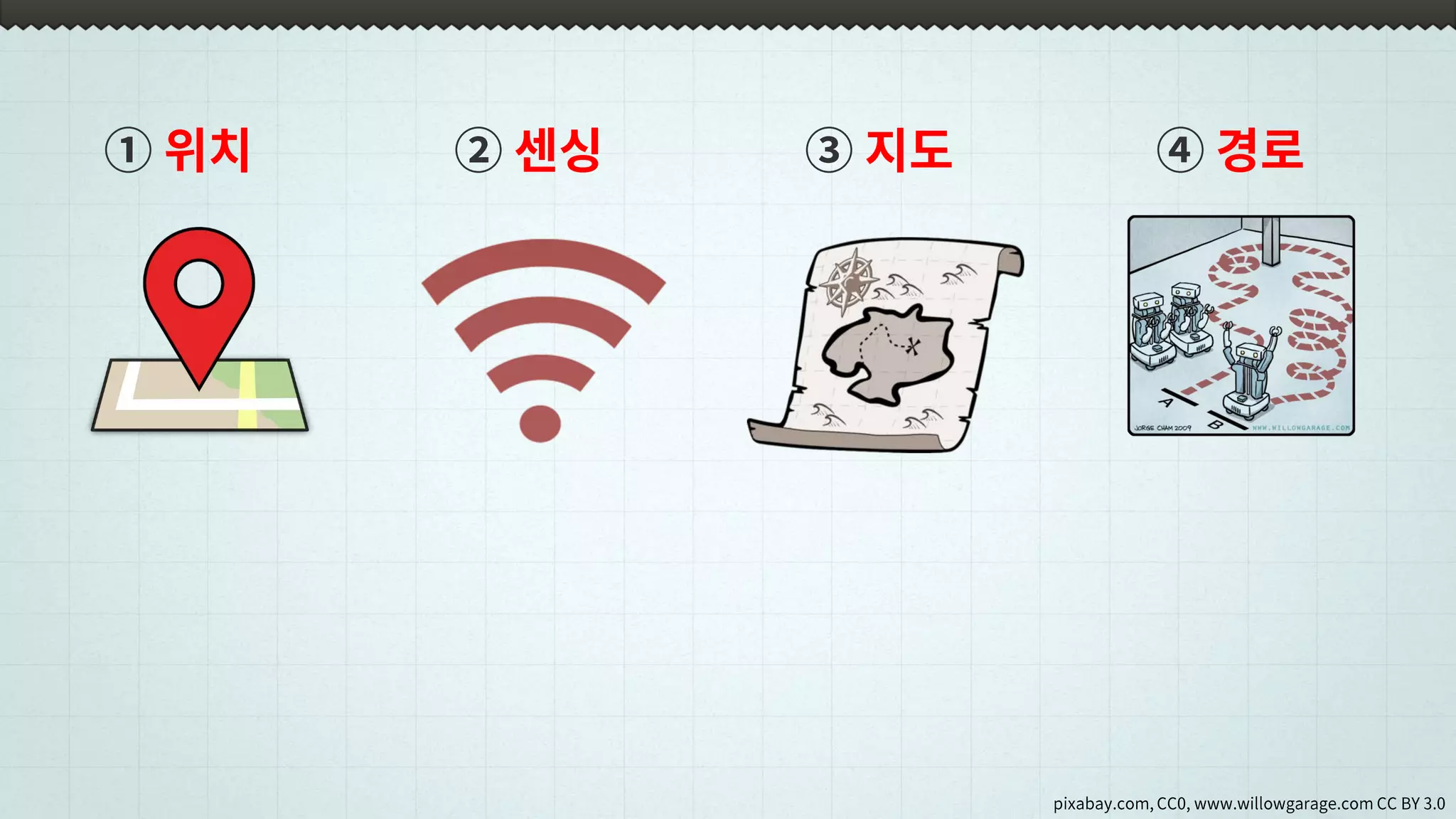
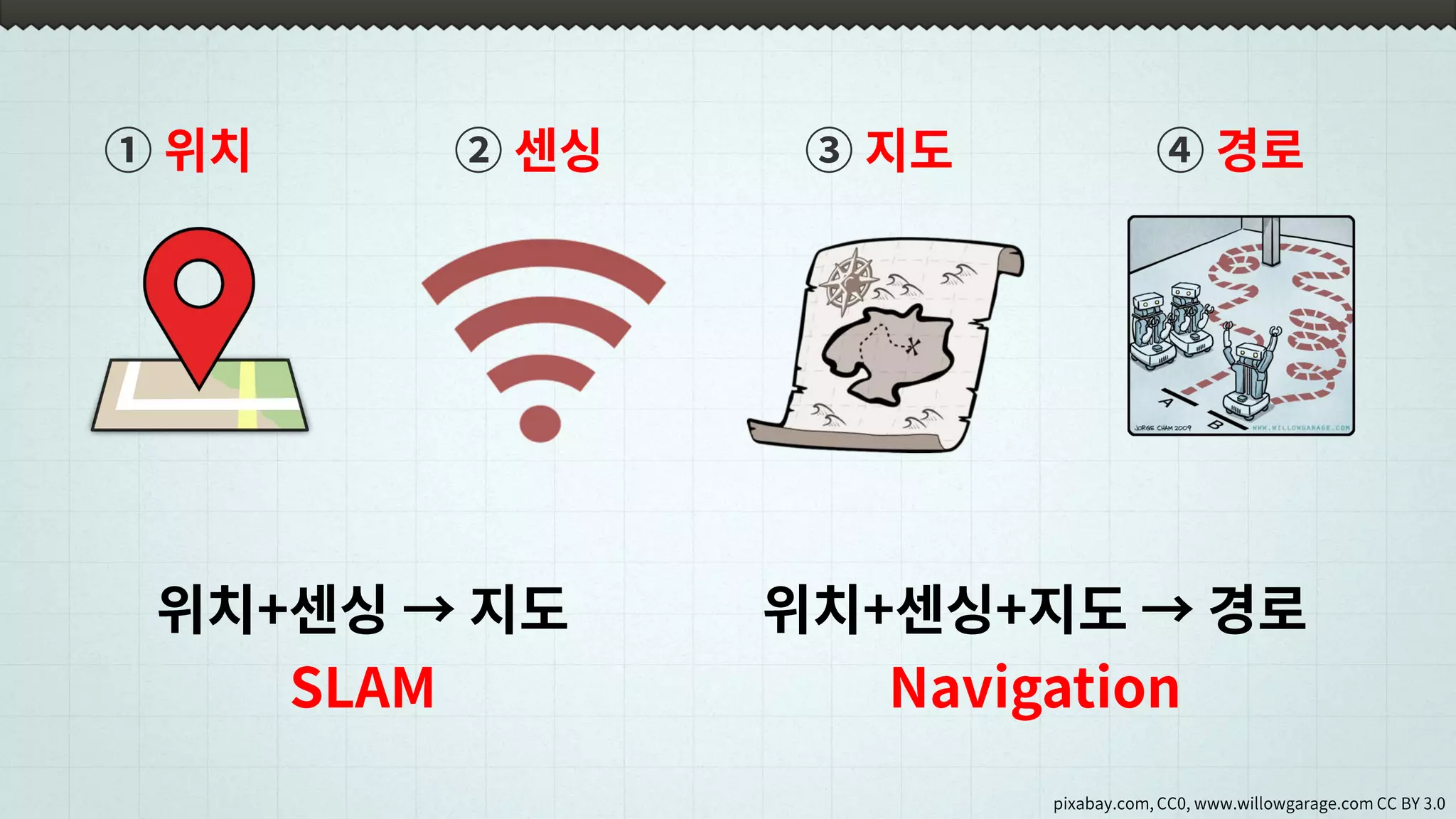
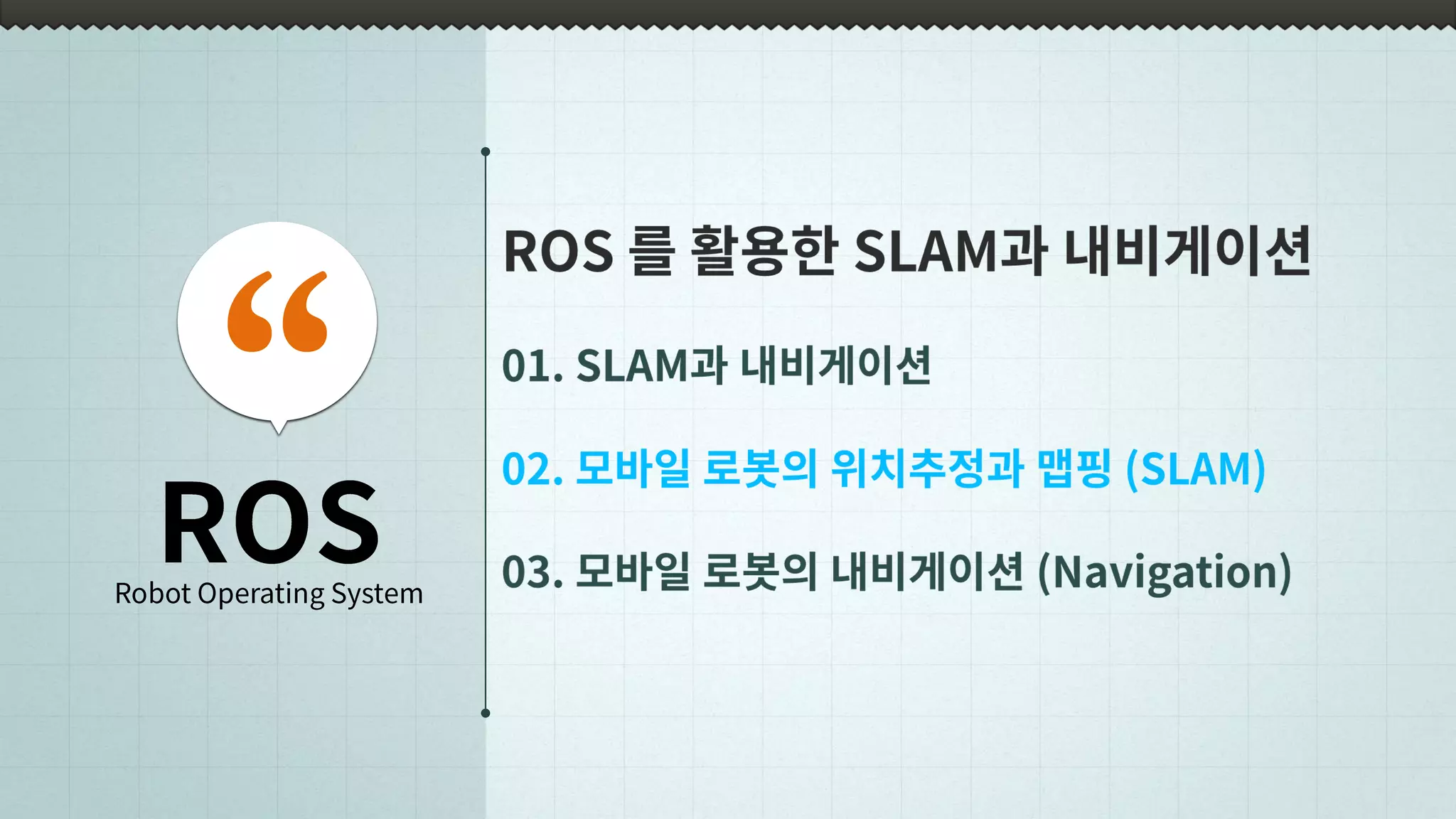



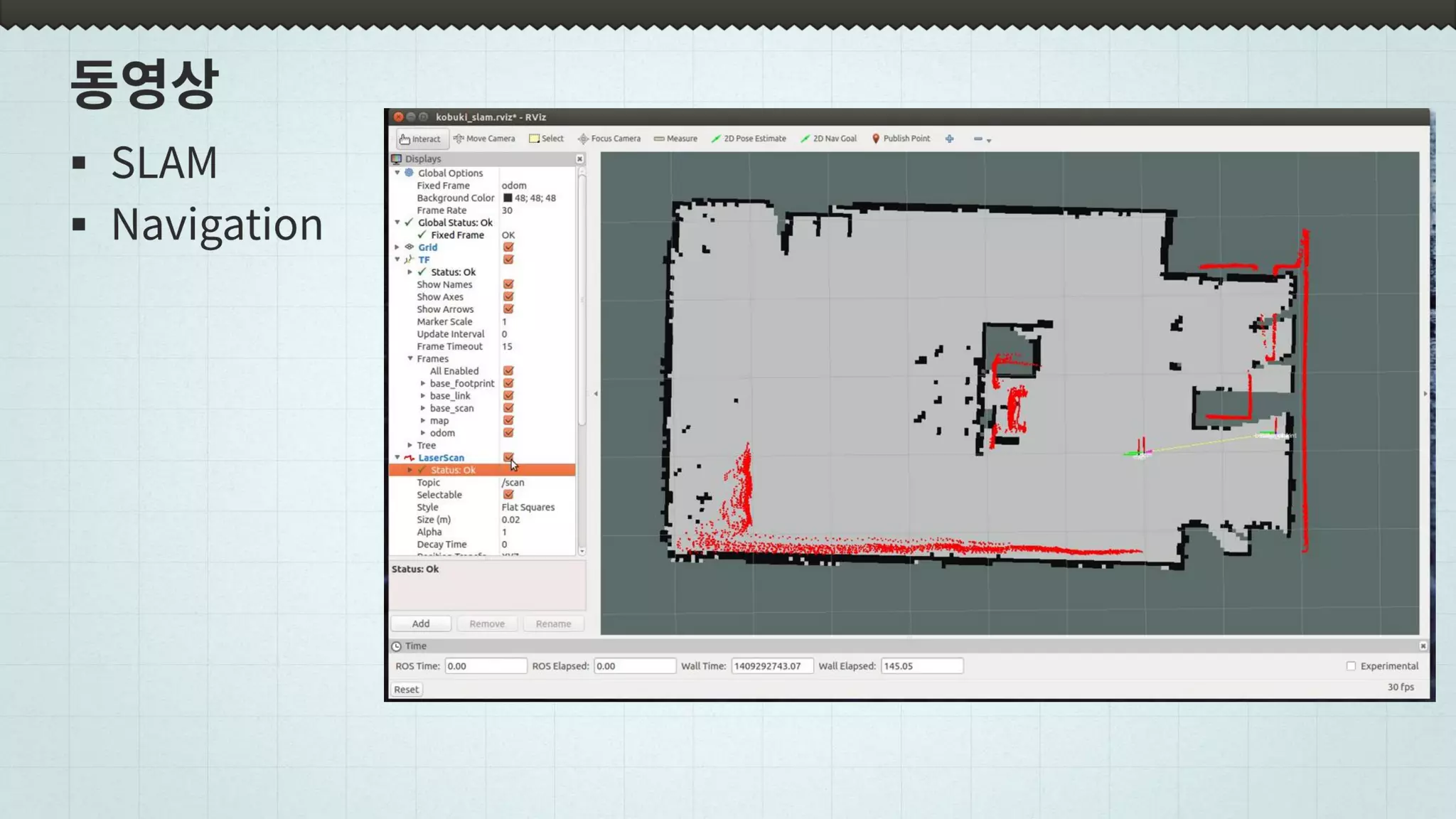


제2회 오픈 로보틱스 세미나 제 10 세션 (2014.12.21 일 13:50 ~ 14:50) 1. 강의제목 : ROS를 활용한 SLAM과 내비게이션 2. 강연자 - 표윤석 - JSPS 특별연구원 - 큐슈대학 박사과정 3. 강좌내용 (1) ROS를 활용한 모바일 로봇의 위치추정과 맵핑 (SLAM) - 모바일 로봇 거북이를 중심으로 SLAM 패키지 사용법과 시연 (2) ROS를 활용한 모바일 로봇의 내비게이션 (Navigation) - 모바일 로봇 거북이를 중심으로 내비게션 패키지 사용법과 시연





![[DL Hacks]Semantic Instance Segmentation with a Discriminative Loss Function](https://cdn.slidesharecdn.com/ss_thumbnails/taniai20180528-180528084124-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Pay Attention to MLPs (gMLP)](https://cdn.slidesharecdn.com/ss_thumbnails/kobayashi-210528032327-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]"Omnimatte: Associating Objects and Their Effects in Video"](https://cdn.slidesharecdn.com/ss_thumbnails/20211217oba-211222005658-thumbnail.jpg?width=640&height=640&fit=bounds)























![[AWS Dev Day] 이머징 테크 | ROS 로 실현하는 어릴 적 로봇과학자의 꿈 - 박천구 AWS 솔루션즈 아키텍트, 박진용 우아한 ...](https://cdn.slidesharecdn.com/ss_thumbnails/ros-190930065536-thumbnail.jpg?width=640&height=640&fit=bounds)

![[A-GIST 발표] Crowdsourced 3D Mapping: A combined Multi-View Geometry and Self-...](https://cdn.slidesharecdn.com/ss_thumbnails/20200825agistcrowdsoureced3dmappingjehonglee-200826112243-thumbnail.jpg?width=640&height=640&fit=bounds)





















