Doosan robots
in AWSRoboMaker
본 문서는 두산로보틱스 정보자산으로, 승인을 받지 않은 문서의 열람, 수정, 배포, 복사를 금지
합니다.
This document is the informational asset of Doosan Robotics. Thus, unauthorized access,
revision, distribution and copying of this document are strictly prohibited.
51
두산로보틱스 소개
Doosan Group
Family
2014사업 착수
두산 그룹의 미래 성장 동력의 한 부문으로
강력한 지원과 투자를 받고 있음
R&D
enters
R&D 센터와 함께 Innovation Lab & Prototyping Lab을
운영하며 혁신적인 제품 개발을 위해 매진하고 있음
(구성원의 50% 이상이 R&D 연구원)
수원시에 소재한 생산 라인에서
연간 1 만대 생산이 가능
Production site
54
협동로봇이란?
산업용 로봇 협동로봇
• 빠른 속도와 높은 가반하중
• 학습이 어려운 사용 방법
로봇 특징
안전 기능
운영
용이성
• 추가 안전 펜스 및 센서가 필요
• 변경이 어렵고, 추가 비용이 필요
• 작업자와 유사한 동작 성능*
• 손쉬운 프로그래밍 환경
• 작업자와 같은 공간에서 사용 가능(펜스 X)
• 충돌 감지와 같은 안전 기능을 제공
• 설치 및 변경이 손쉬움
From Google image search
*: 15 kg 이하 가반하중, 1 m/s 수준 속도
54.
55
협동로봇의 적용 사례
협동로봇 사용의 장점
• 작업자와 협동 로봇이 함께 작업
가능
• 사람과 함께 작업 할 수 있는 안전
기능 제공
• 하나의 로봇으로 다양한 작업을
구현하여 생산성을 향상시킬 수
있음
• 작업자가 로봇 사용 경험이 없음
• 100개 이상의 제품에 대한
프로그래밍이 필요
• 제한된 설치 공간
사례
• 산업용 로봇은 작업자의 다양한
작업 형태를 완전히 대체하기
어려움
• 여러 로봇 사용에 대해 안전
펜스 및 센서 사용 등으로 넓은
공간과 추가 비용이 요구됨
• 손쉬운 프로그래밍
• 좁은 공간에 설치 가능
산업용 로봇의 한계점
55.
56
CNC 장비 보조작업
CNC 장비에 소재 로딩 및 가공물
언로딩 작업 자동화
단위 작업 사이에 작업물을
로딩/언로딩 하는 자동화
Pick & Place
부품 내부의 불량이나 조립
상태를 검사하는 자동화
검사
스크류 고정 또는 기어 조립과 같은
전통적인 수작업 대체
조립(Screw, Gear) 폴리싱 & 디버링
이물질 제거 및 표면 폴리싱
작업 자동화
글루잉/본딩
글루잉이나 본딩을 위한 일정
속도 및 자세의 토출 작업
자동화
플라스틱 사출 자동화
사출기에서 부품 언로딩 및 후속
작업에 로딩하는 자동화
포장 & 팔레타이징
포장 및 이송을 위한 제품 적재
작업 자동화(예, 전기전자,
식음료 등)
프레스 작업 자동화
프레스 장비에 소재
로딩/언로딩 작업 자동화
협동로봇의 주요 응용 사례
두산 로봇 특징
티치펜던트
- Full-Glass Type (Gorilla Glass)
- 10.1 inch Capacitive Touch Screen
- 8 mm Slim Cable
- Compact : 264 x 218 x 42mm
- Light Weight : 0.8kg
제어기
- Compact: 490 x 390 X 287mm
- Light Weight: 9 kg
- Convenient connectivity:
Ethernet, Modbus, EtherNet/IP,
PROFINET
- I/O: 32 Digital, 4 Analog & Flange 12
Digital
로봇 암
- 최대 작업반경: 1.7 m
- 최대 가반하중: 15 kg
- 4 Product line-up
- 전축(6축) 조인트 토크 센서 장착
- Repeatability: ±0.1 mm
- TCP Speed: 1 m/s
고성능 토크센서 탑재로그 어떤 고난도 작업도 완벽하고 안정감 있게
Dexterous
Superb Safety System으로 로봇 작업을 보다 안전하게
Safe
Flexible
스마트 기기와 같은 직관적인 사용성으로 로봇 티칭을 가장 쉽고
빠르게
Easy & Flexible
두산 로봇의 3가지 장점
60.
Safe
Superb Safety System으로로봇 작업을 보다 안전하게
§ 5가지 작업 공간 설정으로 작업 효율성을 향상시킬 뿐
아니라 작업자의 안전을 최우선으로 보호
§ 5가지 작업 공간
① 로봇 단독 작업공간, ② 협동작업공간, ③ 로봇 진입
금지 구역
④ 툴 방향 제한 구역 ⑤ 충돌 감도 개별 설정 구역
Superb
Safety
System
• 6개의 관철 축마다 고성능 토크센서 탑재돼 있어
업계 최고 수준의 충돌 민감도를 자랑
• 전류제어 방식으로는 구현이 어렵던 0.2N 수준의
미세한 힘 변화를 로봇의 모든 축에서 완벽히
감지
61.
Robot adapts toexternal force which
can compensate position errors
allowing precise work, and protecting
both the robot and the workpiece
순응 제어 (Compliance Control)
Dexterous
고성능 토크센서 탑재로 그 어떤 고난도 작업도 완벽하고 안정감 있게
Stops when force setting and detected
force are at equilibrium enabling more
delicate and dexterous operation
compared to current-control type
collaborative robots
힘 제어 (Force Control)
§ 6개의 고성능 토크센서를 기반으로 한 고도의 힘
제어, 순응제어 알고리즘을 바탕으로 폴리싱,
나사조립, 다림질 등과 같은 사람의 손재주가
필요한 섬세하고 정교한 작업을 더욱 정밀하고
완벽하게 수행
62.
Easy & Flexible
스마트기기와 같은 직관적 사용성으로 로봇 티칭을 가장 쉽고 빠르게
§ 티치 팬던트에 픽&플레이스, 조립, 팔레타이징 등
현장에서 자주 쓰이는 다양한 스킬이 사전 탑재돼
있어 로봇 사용경험이 없는 초보자들도 매우 쉽고
간편하게 프로그래밍이 가능
§ 두산 로봇은 5개의 버튼으로 구성된 콕핏(직접 교시
버튼)이 장착돼 있어 간단한 버튼 동작만으로도 각종
티칭 모드 선택은 물론 좌표 저장까지 누구나 손쉽게
직접교시가 가능
Teach Pendant Direct Teaching
ROS?
History - 2007년미국의 스탠포드 대학 인공지능 연구소(AI LAB)가 진행하던 STAIR(STanford
AI Robot) 프로젝트를 위해 Morgan Quigley 이 개발한 "Switchyard" 이라는
시스템에서 시작함.
- 로봇 소프트웨어 개발을 전 세계 레벨에서 공동 작업이 가능하도록 하는 환경 구축Purpose
2018.05
melodic
- ROS는 로봇 응용 프로그램 개발을 위한 운영체제와 같은 로봇 플랫폼.
- 로봇 app을 개발 시 필요한 하드웨어 추상화, 하위 디바이스 제어, 일반적으로
사용되는 기능의 구현, 프로세스간의 메시지 패싱, 패키지 관리, 개발환경에
필요한 라이브러리와 다양한 개발 및 디버깅 도구를 제공.
Features
- 툴과 라이브러리와 함께, ROS 시스템은 정기적으로 ROS배포판 형태로 배포.
- 배포판 형식은 리눅스 배포판과 유사, 사용/빌드에 있어 S/W 적인 호환성이 있는
세트로 공급됨.
Distribution
- 로봇 및 센서 제조사와 같은 개발자, ROS 개발 운용팀, app개발자, 사용자가 이용ROS
Community
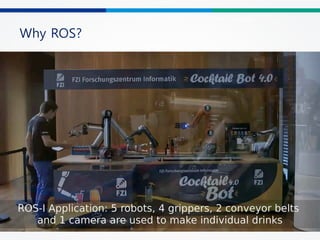
Why ROS?
ü ROSApplication
- 5 robots, 4 grippers, 2 conveyor belts and 1 camera are used to make individual drinks
ü How to connect robots ?
- Filed-bus, API, robot script …
ü Should I learn the language of each robot?
User Application
Direct Teaching
Cocktail Bot 4.0
Linux
ROS
Linux
67.
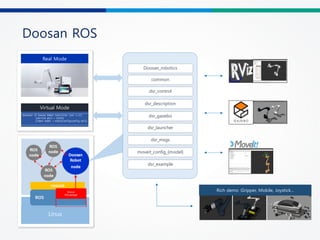
Doosan ROS
Virtual Mode
RealMode
Doosan_robotics
common
dsr_control
dsr_description
dsr_example
dsr_launcher
dsr_msgs
moveit_config_{model}
dsr_gazebo
Rich demo :Gripper, Mobile, Joystick...
Linux
Doosan
ROS package
Linux
68.
NO Description RelatedPackages
1
joint_state_publisher+ Rviz
- Loading robot models with Rviz
- Driving robot with joint_state_publisher
dsr_description
2
moveIt+ Rviz
- set target position with the Interactive maker → motion planning with MoveIt →
dispatch motion to real robot.
- C ++ / python can be used to control moveIt.
moveit_config_{model}
dsr_control
3
Single Robot
- Simulating a single robot on Rviz or Gazebo in virtual mode.
- Driving a real robot in real mode
common
dsr_msgs
dsr_control
dsr_gazebo
dsr_launcher
4
Multi Robot
- Simulating a single robot on Rviz or Gazebo in virtual mode.
- Driving a real robot in real mode
5
Integration with Gripper device
- Integrated with ROBOTIQ's Gripper (ROS Support).
- Simulation and real driving is supported.
6
Mobile Robot
- Integration with Clearpath Robotics’ Husky UGV (Mobile Robot)
7
Demo
- Rich examples for Doosan cobots written in C ++ and Python
dsr_example
Doosan ROS
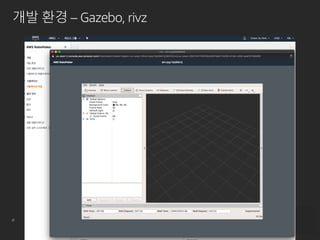
AWS RoboMaker?
§ Helpsdeveloping robot applications in cloud-based environment.
§ Provides robotics development environment for editing and building robotics applications.
§ Provides simulation tools such as Gazebo and Rviz in the cloud environment.
§ Fleet Management helps distributing bundled packages.
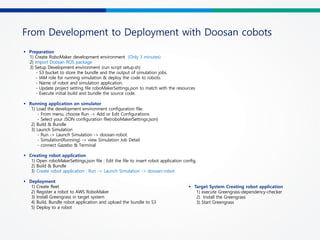
From Development toDeployment with Doosan cobots
§ Preparation
1) Create RoboMaker development environment (Only 3 minutes)
2) Import Doosan ROS package
3) Setup Development environment (run script setup.sh)
- S3 bucket to store the bundle and the output of simulation jobs.
- IAM role for running simulation & deploy the code to robots.
- Name of robot and simulation application.
- Update project setting file roboMakerSettings.json to match with the resources
- Execute initial build and bundle the source code.
§ Running application on simulator
1) Load the development environment configuration file.
- From menu, choose Run -> Add or Edit Configurations
- Select your JSON configuration file(roboMakerSettings.json)
2) Build & Bundle
3) Launch Simulation
- Run -> Launch Simulation -> doosan-robot.
- Simulation(Running) -> view Simulation Job Detail
- connect Gazebo & Terminal
§ Creating robot application
1) Open roboMakerSettings.json file : Edit the file to insert robot application config.
2) Build & Bundle
3) Create robot application : Run -> Launch Simulation -> doosan-robot
§ Deployment
1) Create fleet
2) Register a robot to AWS RoboMaker
3) Install Greengrass in target system
4) Build, Bundle robot application and upload the bundle to S3
5) Deploy to a robot
§ Target System Creating robot application
1) execute Greengrass-dependency-checker
2) Install the Greengrass
3) Start Greengrass
Lesson Learned
§ 항상자신의 개발 환경이 클라우드 에 있음에 유의!
§ 사용하고자 하는 ROS 패키지를 RoboMaker 환경에 맞게 수정 필요. (자동 X)
- ROS 패키지 안의 라이브러리 실행파일들이 모두 사용자 계정으로 실행 가능 해야 함. (root 권한 X)
- ROS 패키지를 robot_ws와 simulation_ws로 분할.
- package.xml : <run_depend>, <exec_depend> 를 엄격하게 지정해야 함.
- CMakeLists.txt : 실행에 관여되는 바이너리,라이브러리,스크립트 등이 CATKIN_PACKAGE_BIN_DESTINATION 에
install 되도록 해야 함.
§ Build & bundling 한 후, 반드시 Launch Simulation을 해야만 Robot applications 생성 됨을 유의!
§ 타겟 PC에는 ROS가 설치되어 있지 않아도 됨. (Greengrass 만 설치되면 O.K. )
- bundling 결과물 : output.tar 사이즈 약 700MB? → user app 뿐만 아니라 ROS+관련 패키지 함께 포함.
§ Greengrass 설치 시 , dependency software 설치 유의
- Ubuntu 16.04 표준 설치 기준 java8, python3.5, node.js8.10 등의 dependency SW 설치 필요.
- 해당 SW 설치 후, /usr/bin에 심볼릭 링크 등록 필요 : ex> java8 → node.js8.10
























































































































![[전문가 발표] 로.열.모. (김홍석 박사)](https://cdn.slidesharecdn.com/ss_thumbnails/150704-150810054638-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![[D3T1S05] Aurora 혼합 구성 아키텍처를 사용하여 예상치 못한 트래픽 급증 대응하기](https://cdn.slidesharecdn.com/ss_thumbnails/d3t1s05aurora-240702042911-c7f3f22d-thumbnail.jpg?width=640&height=640&fit=bounds)

![[D3T2S01] Amazon Aurora MySQL 메이저 버전 업그레이드 및 Amazon B/G Deployments 실습](https://cdn.slidesharecdn.com/ss_thumbnails/d3t2s01amazonaurorabluegreendeployment-240702042226-3ae36566-thumbnail.jpg?width=640&height=640&fit=bounds)


![[D3T1S02] Aurora Limitless Database Introduction](https://cdn.slidesharecdn.com/ss_thumbnails/d3t1s02auroralimitlessdatabaseintroduction-240702042911-cb5552b7-thumbnail.jpg?width=640&height=640&fit=bounds)
![[D3T1S01] Gen AI를 위한 Amazon Aurora 활용 사례 방법](https://cdn.slidesharecdn.com/ss_thumbnails/d3t1s01genaiamazonaurora-240702042912-516e67f4-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Keynote] 슬기로운 AWS 데이터베이스 선택하기 - 발표자: 강민석, Korea Database SA Manager, WWSO, A...](https://cdn.slidesharecdn.com/ss_thumbnails/d3s01aws-230704014400-3eeae447-thumbnail.jpg?width=640&height=640&fit=bounds)



![[D3T1S07] AWS S3 - 클라우드 환경에서 데이터베이스 보호하기](https://cdn.slidesharecdn.com/ss_thumbnails/d3t1s07-240702042911-cb134cd6-thumbnail.jpg?width=640&height=640&fit=bounds)
![[D3T2S03] Data&AI Roadshow 2024 - Amazon DocumentDB 실습](https://cdn.slidesharecdn.com/ss_thumbnails/d3t2s03documentdbhandson-240702042224-047bbc2c-thumbnail.jpg?width=640&height=640&fit=bounds)
![[D3T1S04] Aurora PostgreSQL performance monitoring and troubleshooting by use...](https://cdn.slidesharecdn.com/ss_thumbnails/d3t1s04aurorapostgresqlperformancemonitoringandtroubleshooting-240702042912-5df626e3-thumbnail.jpg?width=640&height=640&fit=bounds)



![[D3T1S03] Amazon DynamoDB design puzzlers](https://cdn.slidesharecdn.com/ss_thumbnails/d3t1s03amazondynamodbdesignpuzzlers-240702042912-ad6df881-thumbnail.jpg?width=640&height=640&fit=bounds)
![[D3T1S06] Neptune Analytics with Vector Similarity Search](https://cdn.slidesharecdn.com/ss_thumbnails/d3t1s06neptuneanalyticsvectorsilimliaritysearch-240702042912-94c41309-thumbnail.jpg?width=640&height=640&fit=bounds)
