Download to read offline
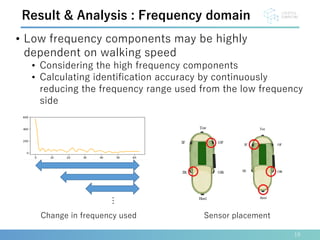
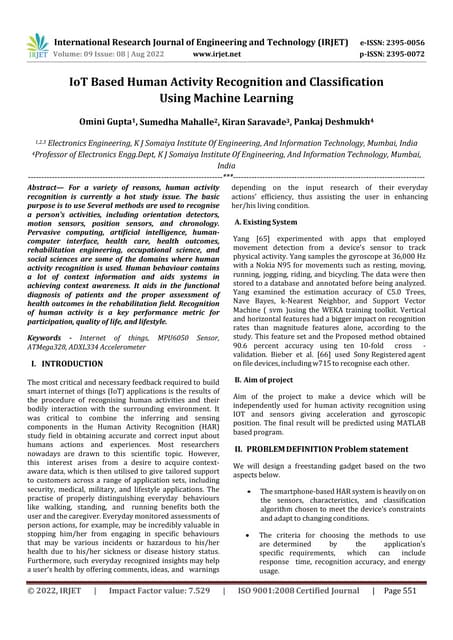
![• IMU(Inertial Measurement Unity)based walking
dataset[7] for identification
13
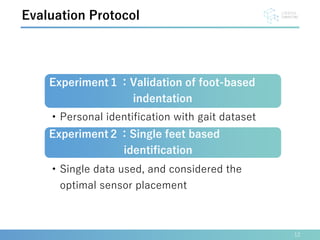
Experiment1:Overview
Participant 10(Male 5・Female 5)
Motion Walking
Sensor position Full body 17 places
Frame rate [fps] 60
Length[s] 90seconds
Number of point 5000
Samples 128
Window size 120
Dataset Overview
Sensor location
[7] C. Xia and Y. Sugiura, "Wearable Accelerometer Optimal Positions for Human Motion Recognition," 2020 IEEE 2nd Global Conference on Life Sciences and
Technologies (LifeTech), Kyoto, Japan, 2020, pp. 19-20](https://image.slidesharecdn.com/acmiyufujii-210524094313/85/Personal-Identification-using-Gait-Data-on-Slipper-device-with-Accelerometer-Asian-CHI-2021-Symposium-9-320.jpg)
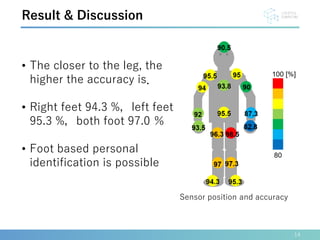
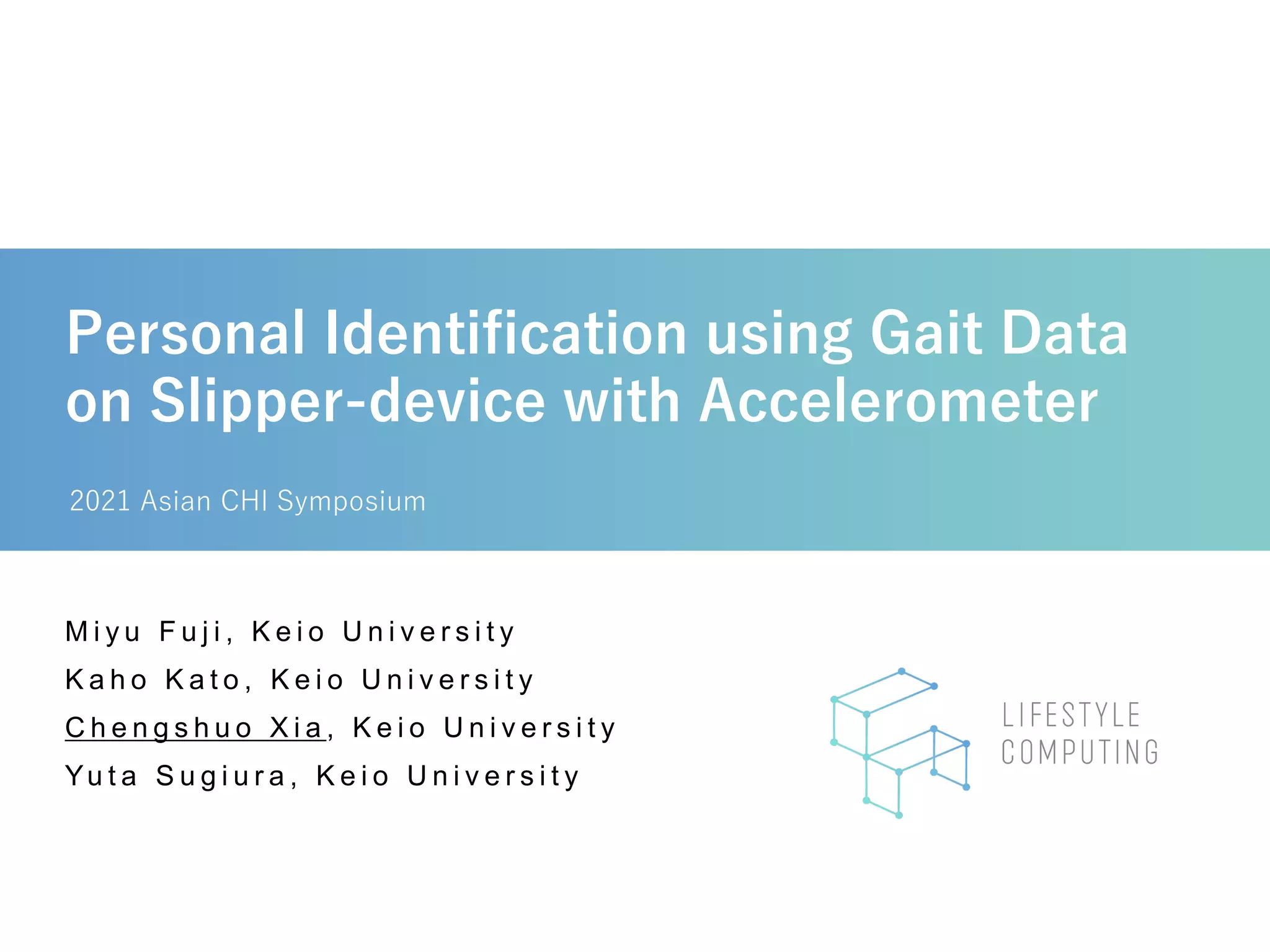
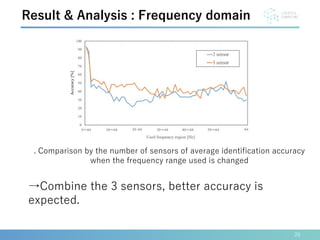
![• Optimumal sensor position assessment using a
one-feet slipper device
15
Experiment2:Overview
Participant 5(Male 2・Female 3)
Motion
Walking
(Do not indicate the speed or
step)
Environment long flat corridor
Sensed data
6 accelerometers on the right
foot
(Same slipper on the left foot)
Frame rate[fps] 37.5
Length[s] 32
Data points 1200
Samples 128
Window size 100
Overview
Walking status](https://image.slidesharecdn.com/acmiyufujii-210524094313/85/Personal-Identification-using-Gait-Data-on-Slipper-device-with-Accelerometer-Asian-CHI-2021-Symposium-11-320.jpg)
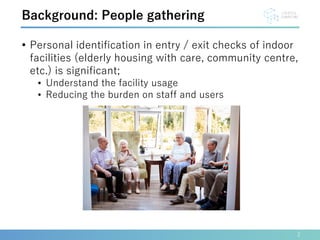
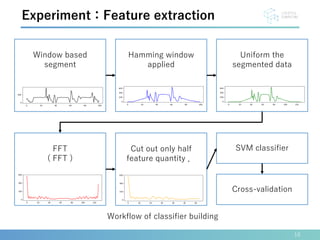
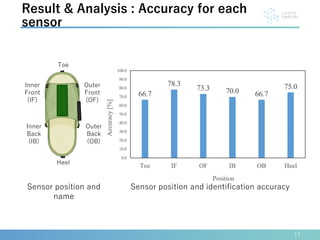
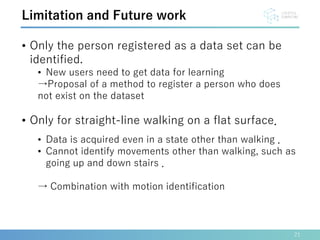
![• Accuracy using all sensors (6 locations) is 95%
16
Result & Analysis:Accuracy from all
sensors
All six-sensor based confusion matrix[%]
Six-sensor](https://image.slidesharecdn.com/acmiyufujii-210524094313/85/Personal-Identification-using-Gait-Data-on-Slipper-device-with-Accelerometer-Asian-CHI-2021-Symposium-12-320.jpg)


This document describes research on using gait data from a wearable accelerometer device in slippers to identify individuals. An experiment was conducted with 10 participants wearing slippers with 6-axis accelerometers. Gait data was collected from different sensor positions and used to train an SVM classifier to identify participants. The results showed over 94% accuracy when using data from the foot sensors, especially the toe, inner foot, and heel sensors. Additional experiments varying the frequency components and number of sensors showed combining data from multiple foot sensors can improve identification accuracy. The research aims to enable contactless personal identification in facilities while preserving privacy.





















































![[FIT2025 トップコンファレンスセッション]EarHover: ヒアラブルデバイスにおける音漏れ信号を用いた空中ジェスチャ認識](https://cdn.slidesharecdn.com/ss_thumbnails/fit2025-presentationv2-251006033725-c7651715-thumbnail.jpg?width=640&height=640&fit=bounds)






























