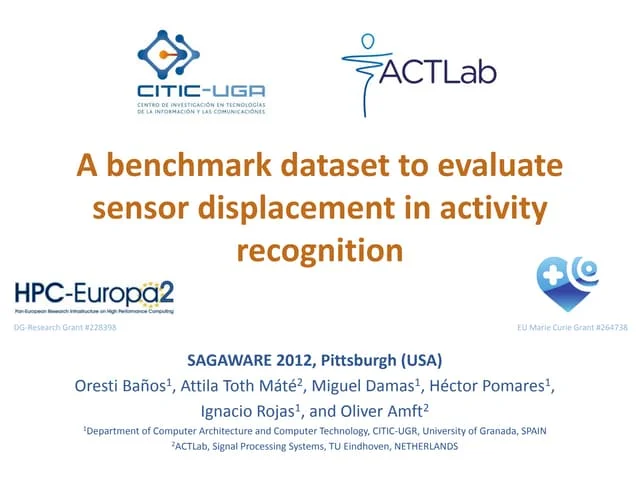
![Multi-Sensor Hierarchical Classifier
11
SM
S2
S1
α11
∑
C12
C1N
C11
∑
C21
C22
C2N
∑
CM1
CM2
CMN
∑
Decision
Class level Source level Fusion
β11
α12
β12
α1N
β1N
α21
β21
α22
β22
α2N
β2N
αM1
βM1
αM2
βM2
αMN
βMN
γ11,…,1N
δ11,…,1N
γ21,…,2N
δ21,…,2N
γM1,…,MN
δM1,…,MN
[-0.14,3.41,4,21,…,6.11]
[-0.84,3.21,4.21,…,6.11]
[-0.81,5.71,4.21,…,6.22]
[-0.14,3.92,4.23,…,7.82]
S1
S2
SM
u1 p1 s11,s12,…,s1k fℝ(s11,s12,…,s1k)
u2 p2 s21,s22,…,s2k fℝ(s21,s22,…,s2k)
uM pM sM1,sM2,…,sMk fℝ(sM1,sM2,…,sMk)
O. Banos, M. Damas, H. Pomares, F. Rojas, B. Delgado-Marquez, and O. Valenzuela. Human activity recognition
based on a sensor weighting hierarchical classifier. Soft Computing, 17:333-343, 2013.](https://image.slidesharecdn.com/banosucami2013-140506051756-phpapp02/75/Handling-displacement-effects-in-on-body-sensor-based-activity-recognition-11-2048.jpg)











The document discusses challenges in on-body sensor-based activity recognition, focusing on the effects of sensor displacement on system performance. It emphasizes the importance of sensor fusion methods, noting that decision fusion is more robust to displacement than feature fusion. The study suggests that accelerometer data is less affected by sensor displacement compared to other modalities, thus impacting the reliability of activity recognition systems.