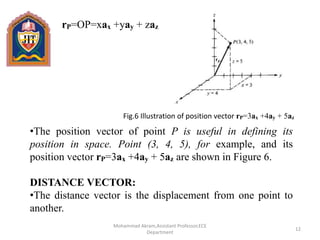
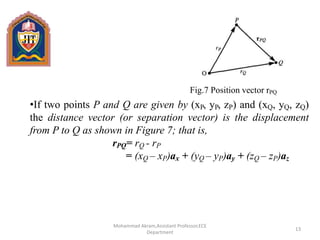
This document introduces electromagnetic field theory, focusing on vectors and their applications in various fields such as engineering and physical medicine. It covers scalar and vector quantities, the addition and subtraction of vectors, unit vectors, and vector multiplication, including dot and cross products. The document explains concepts with illustrations and mentions practical applications of electromagnetic principles.