Download as PDF, PPTX
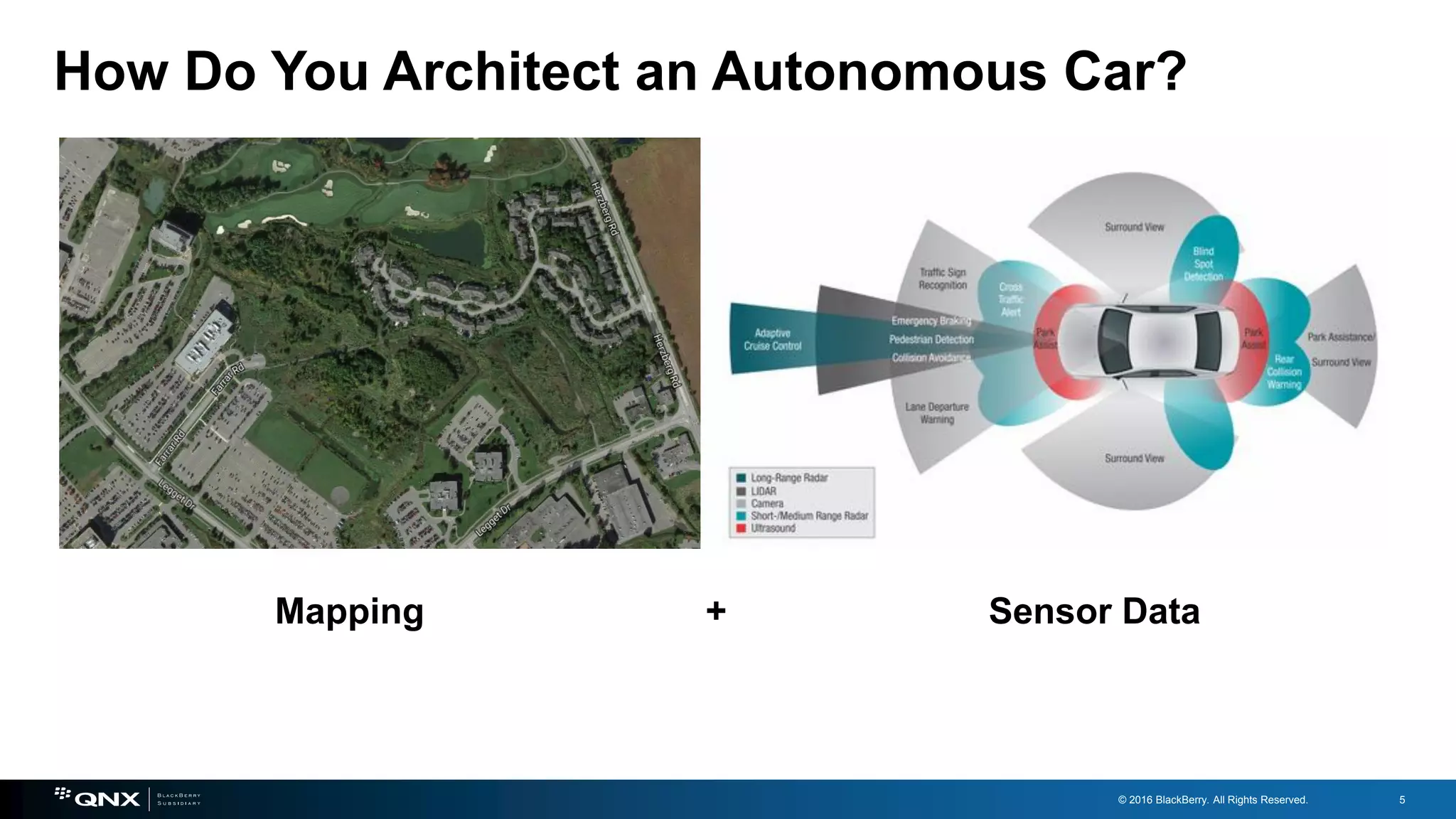
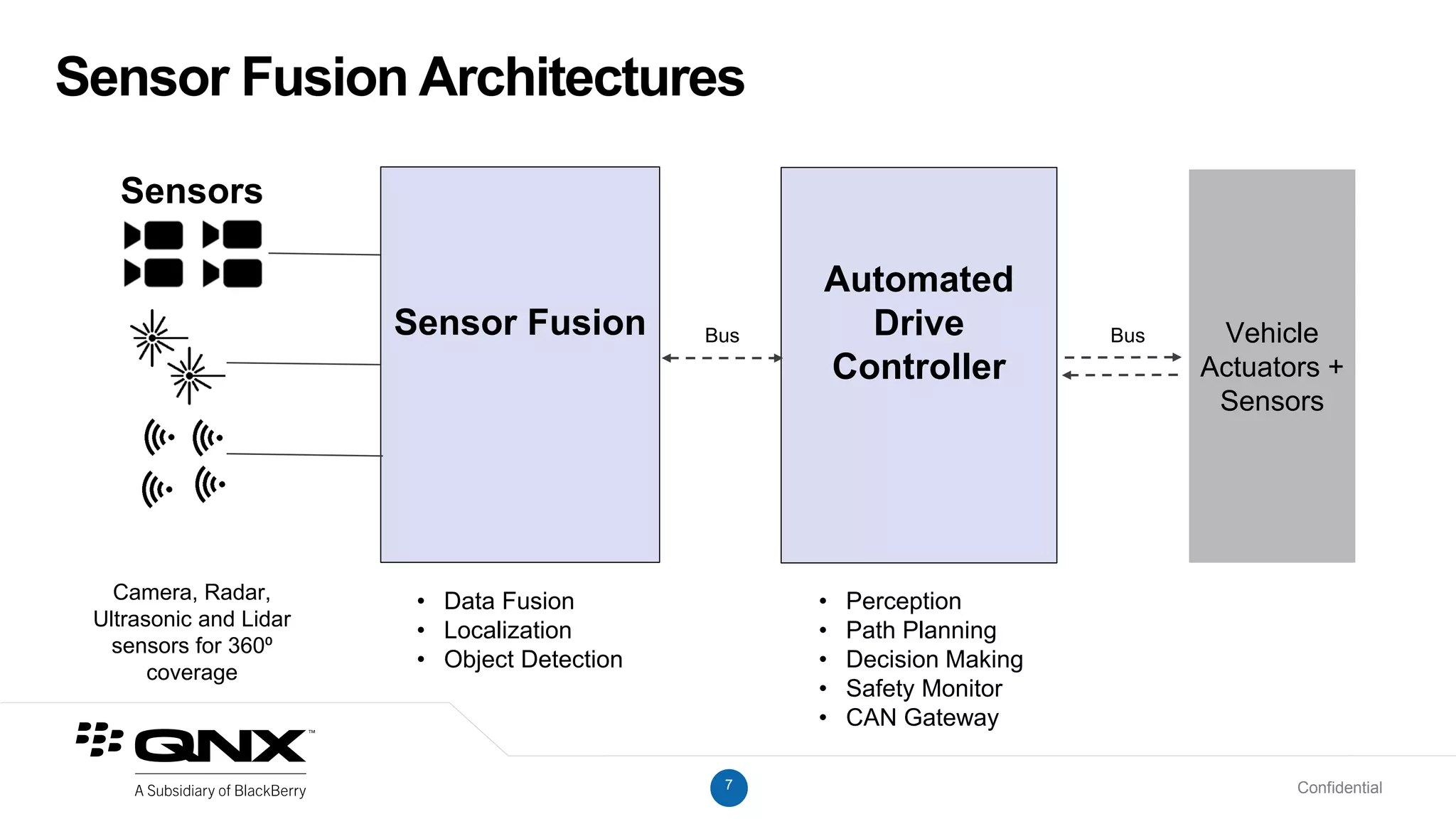
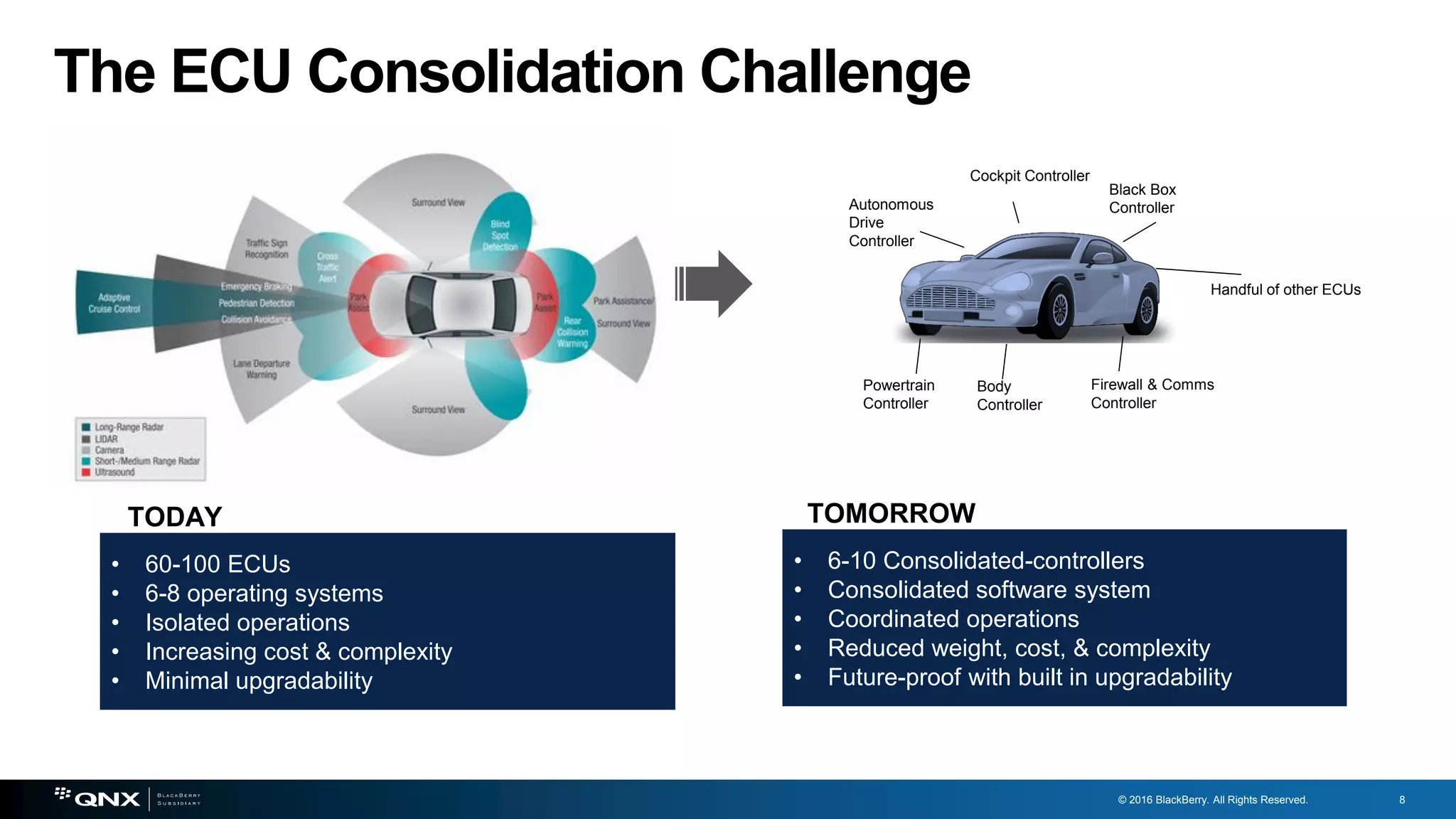
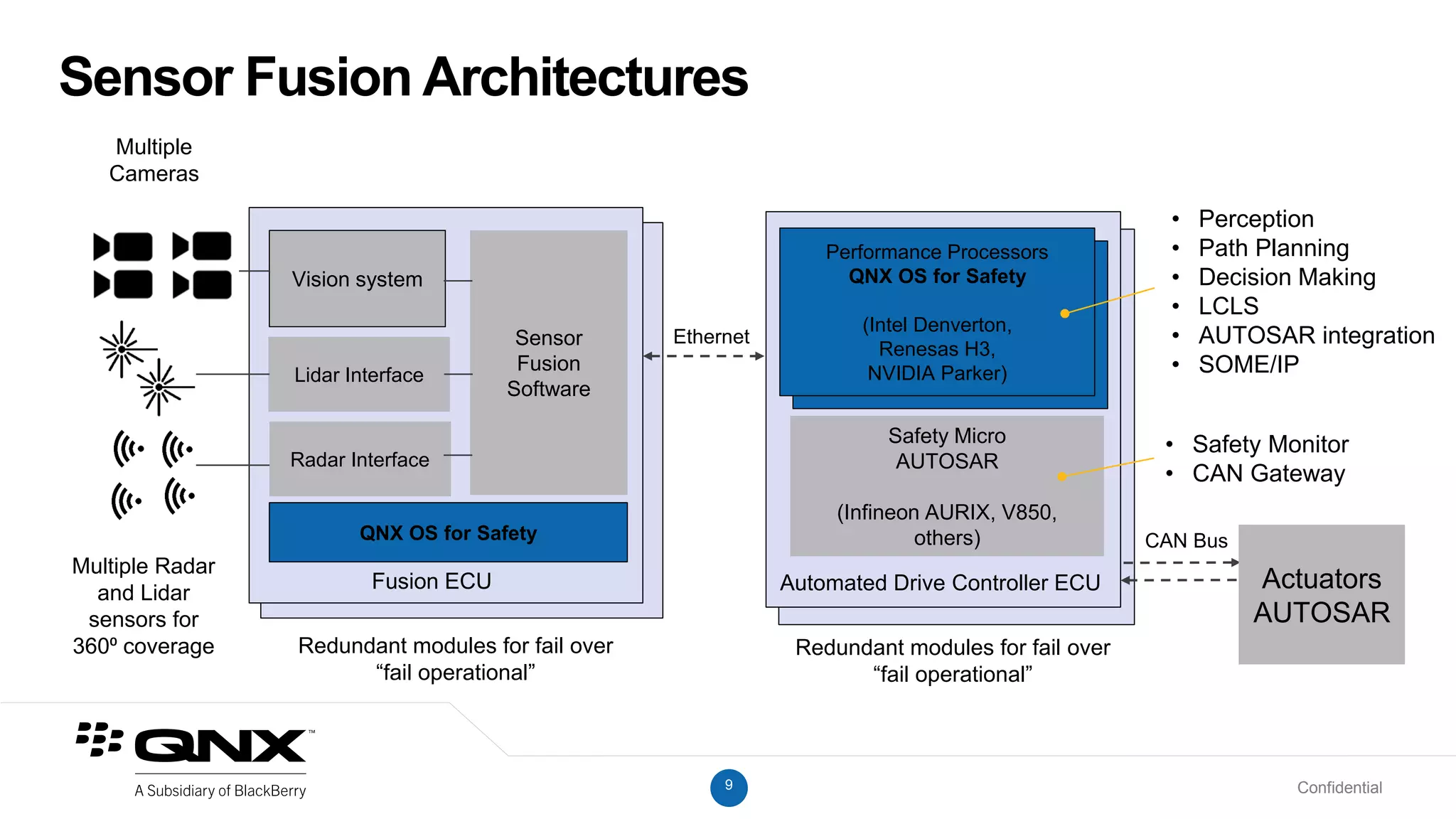
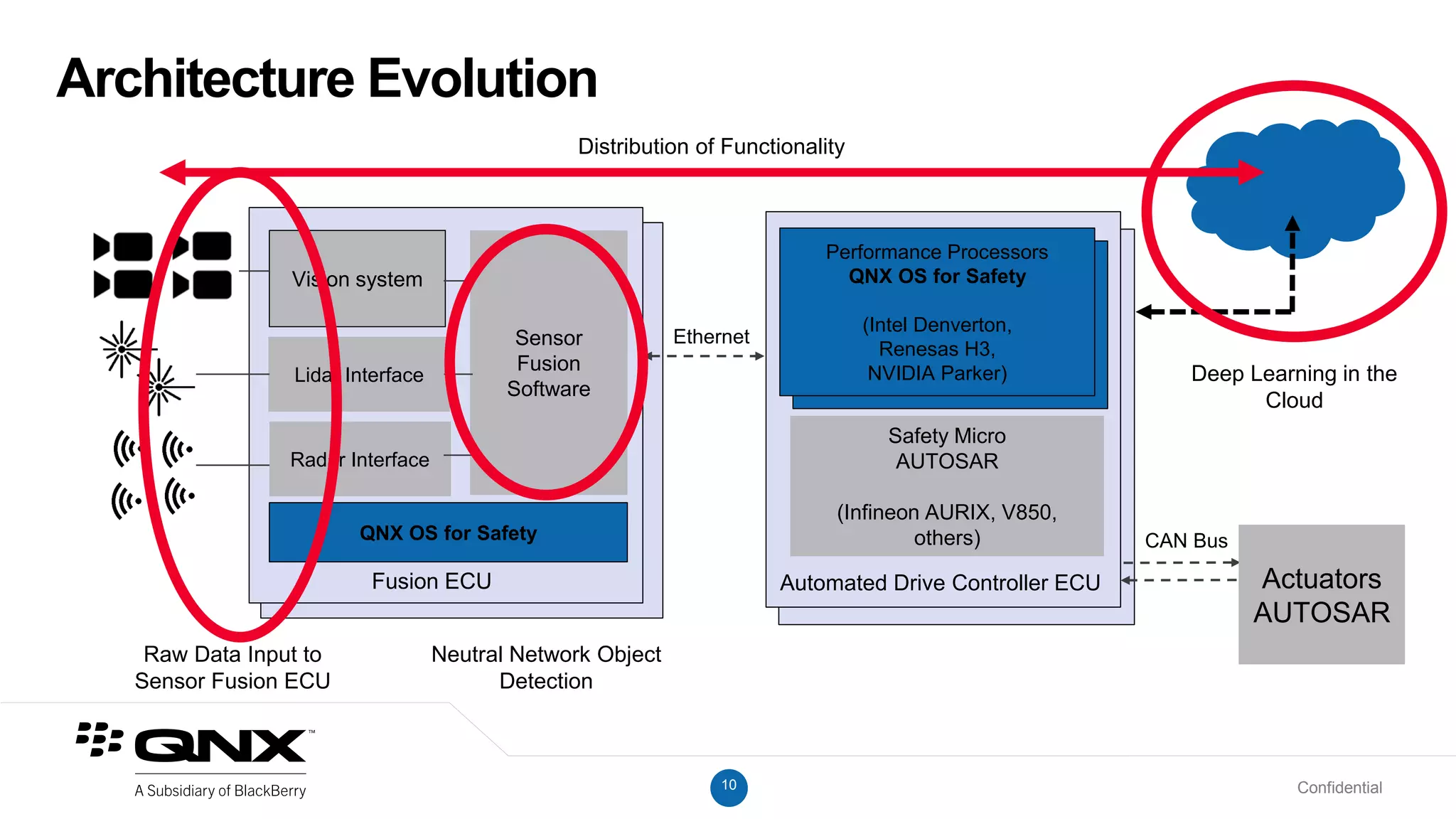
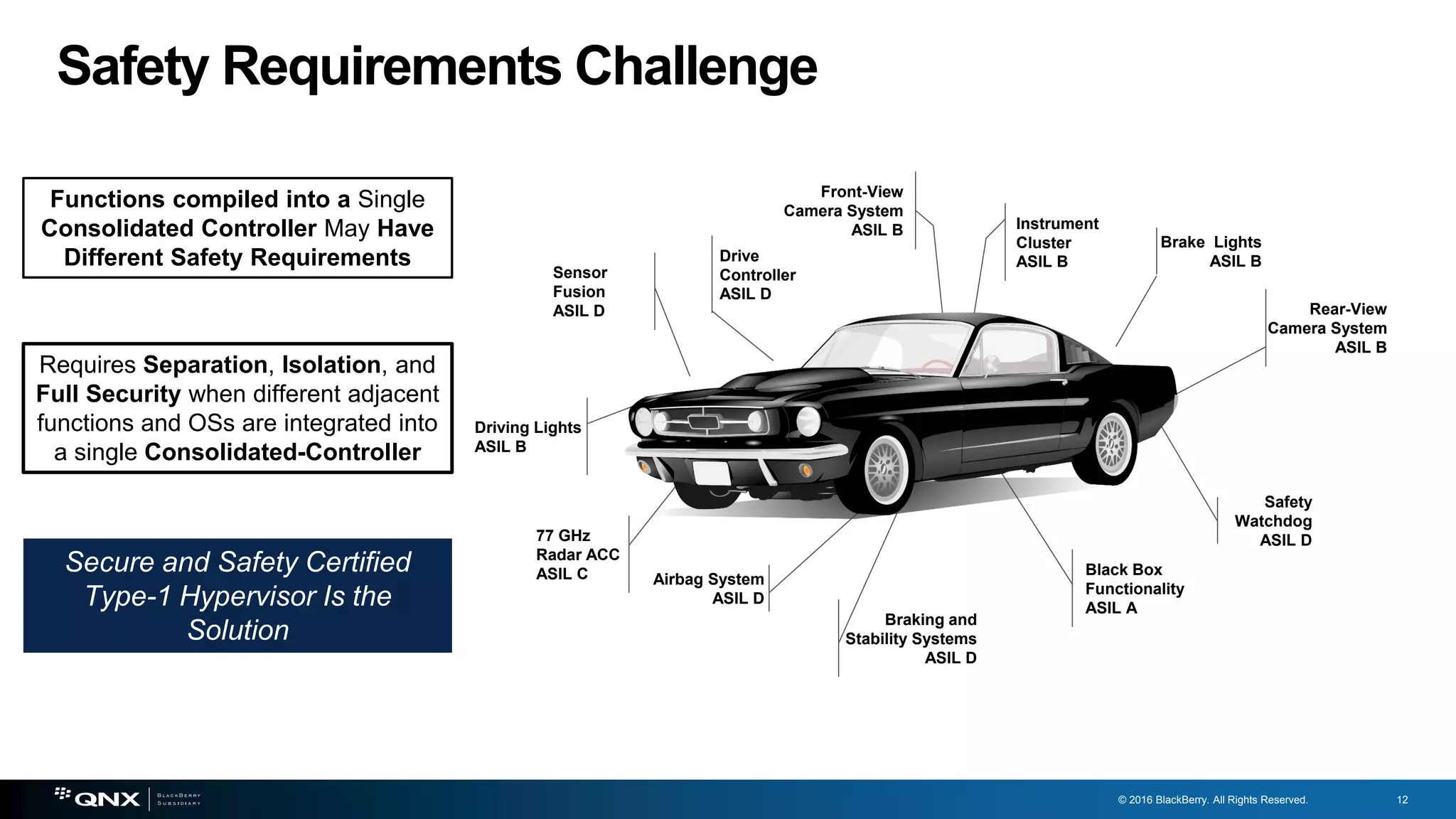
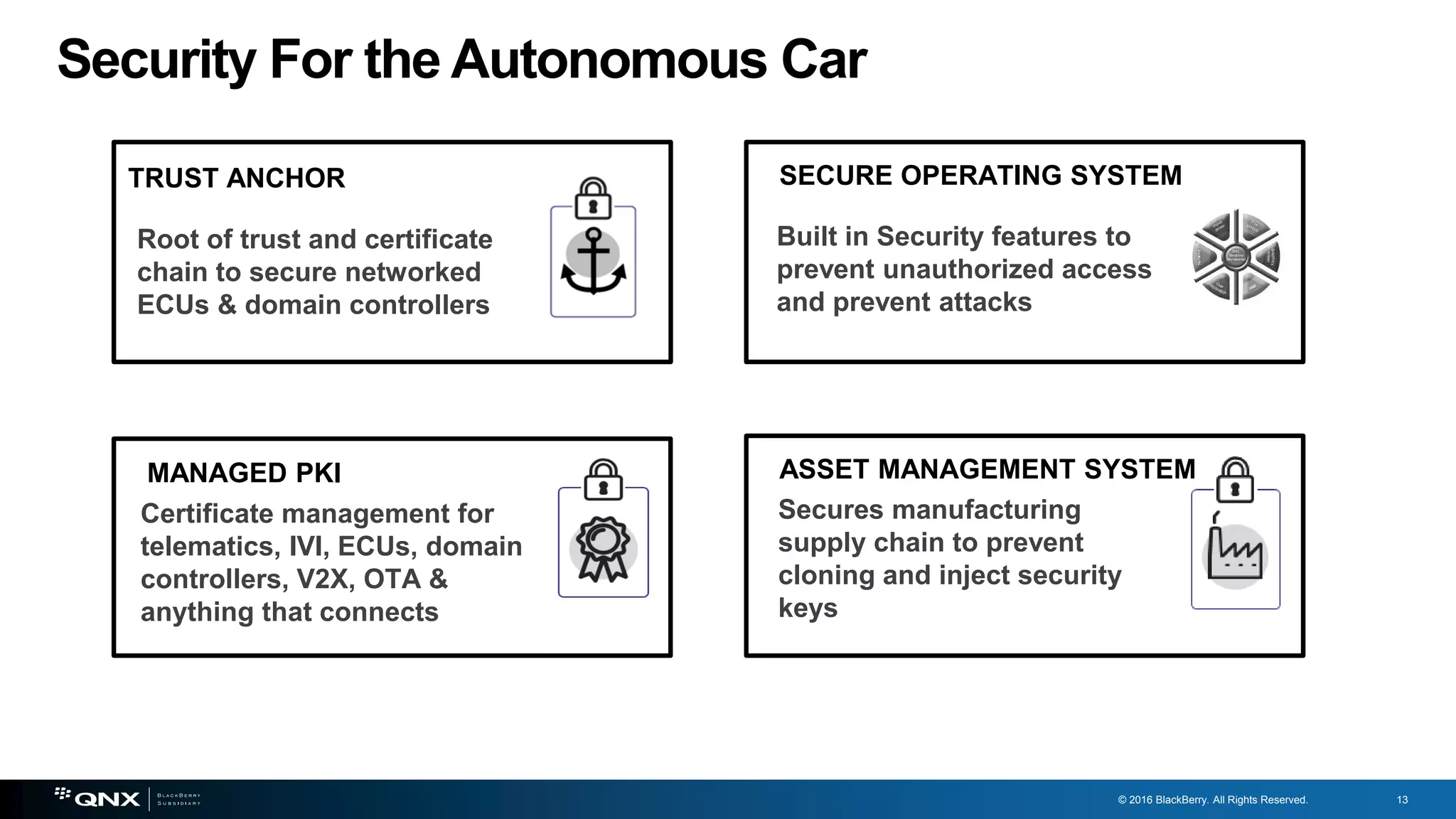
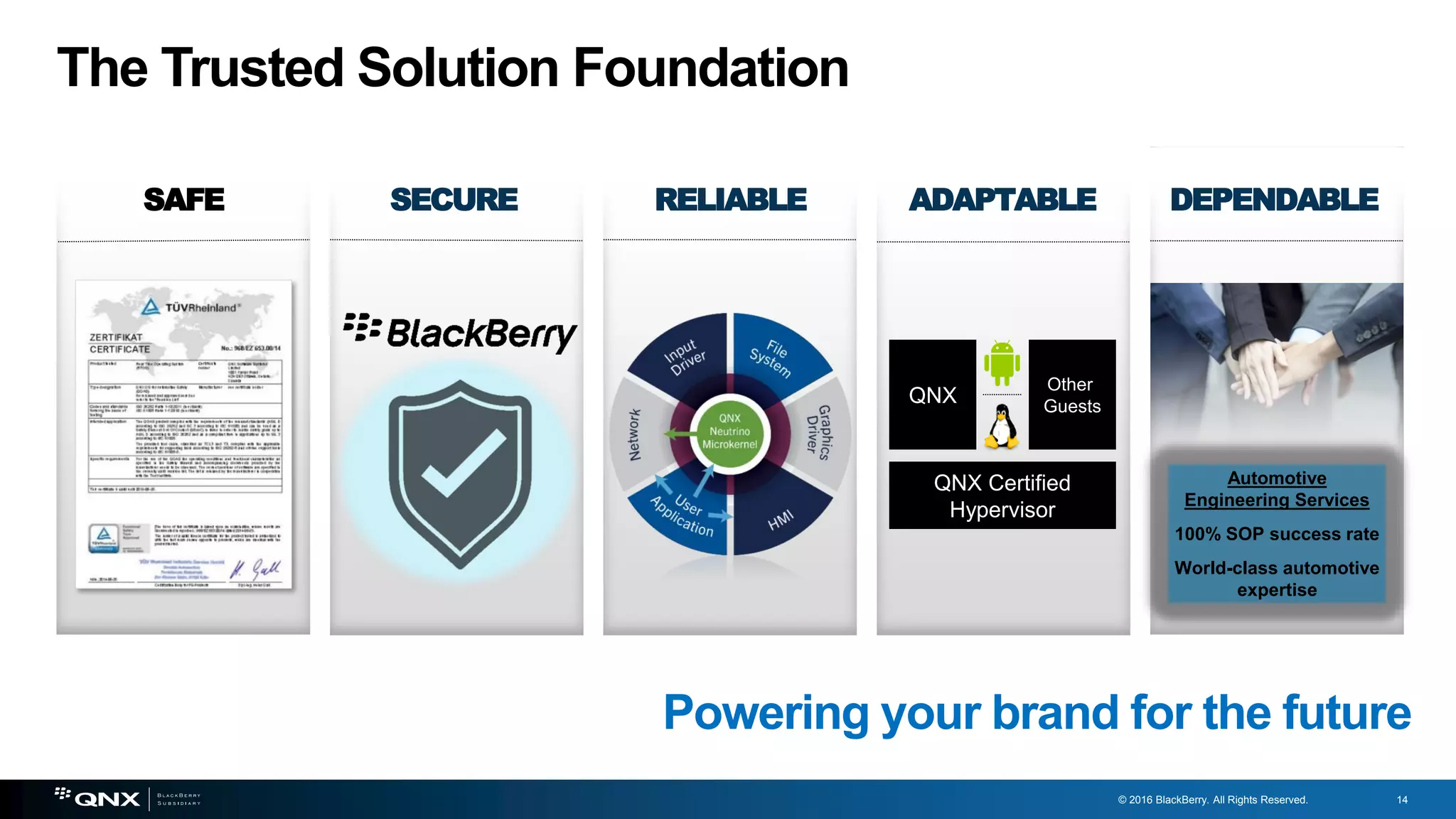
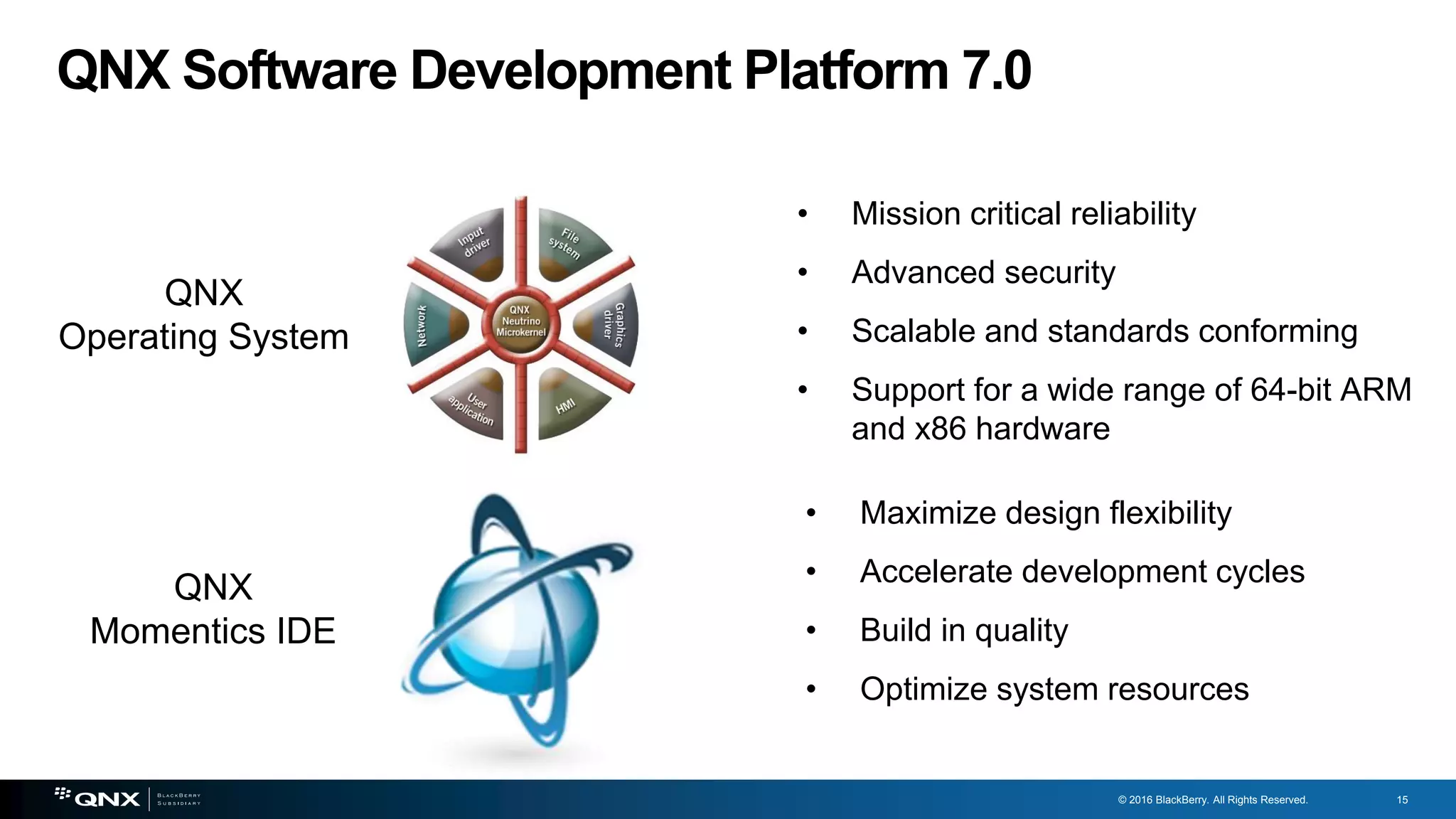
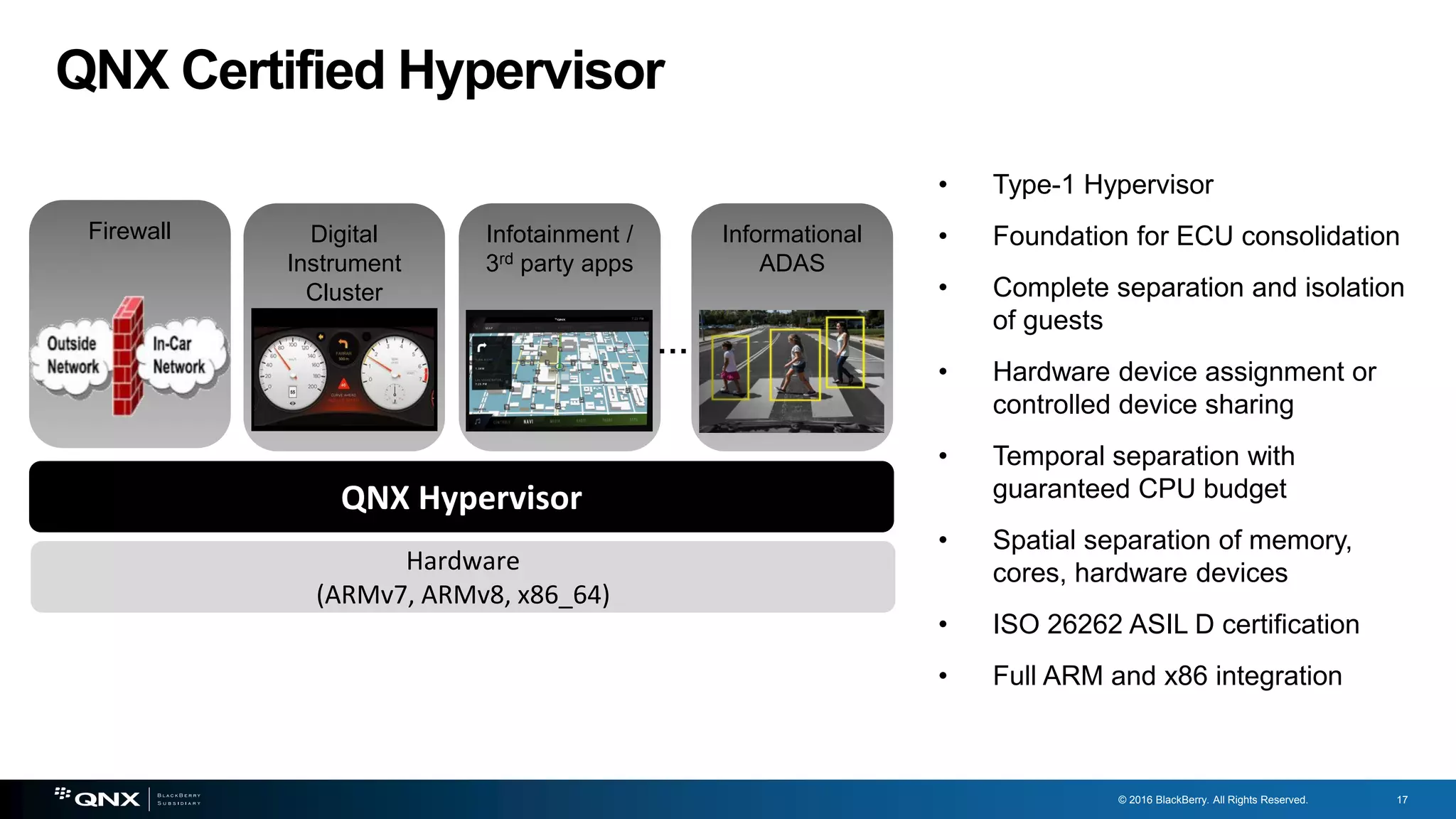



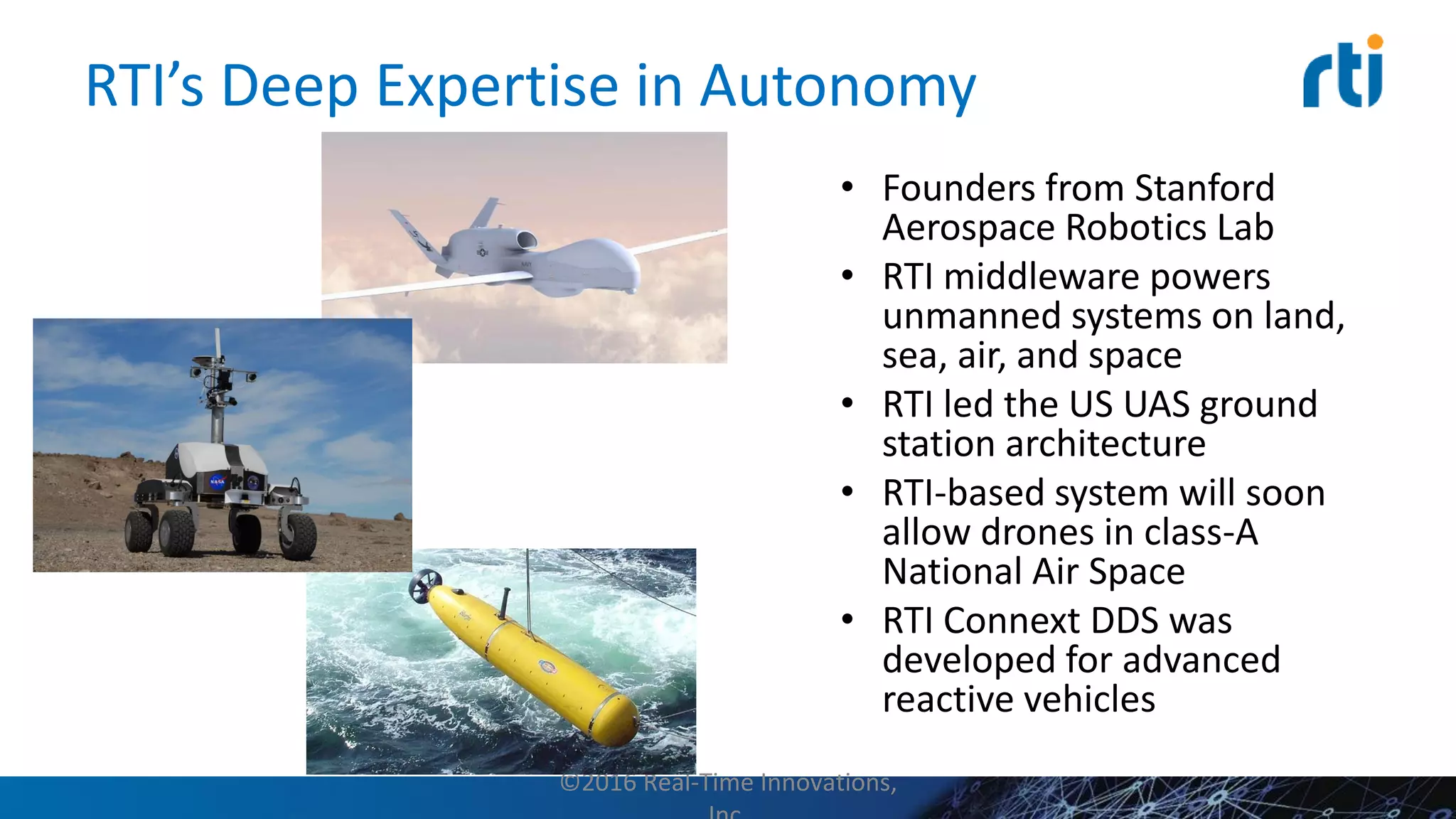
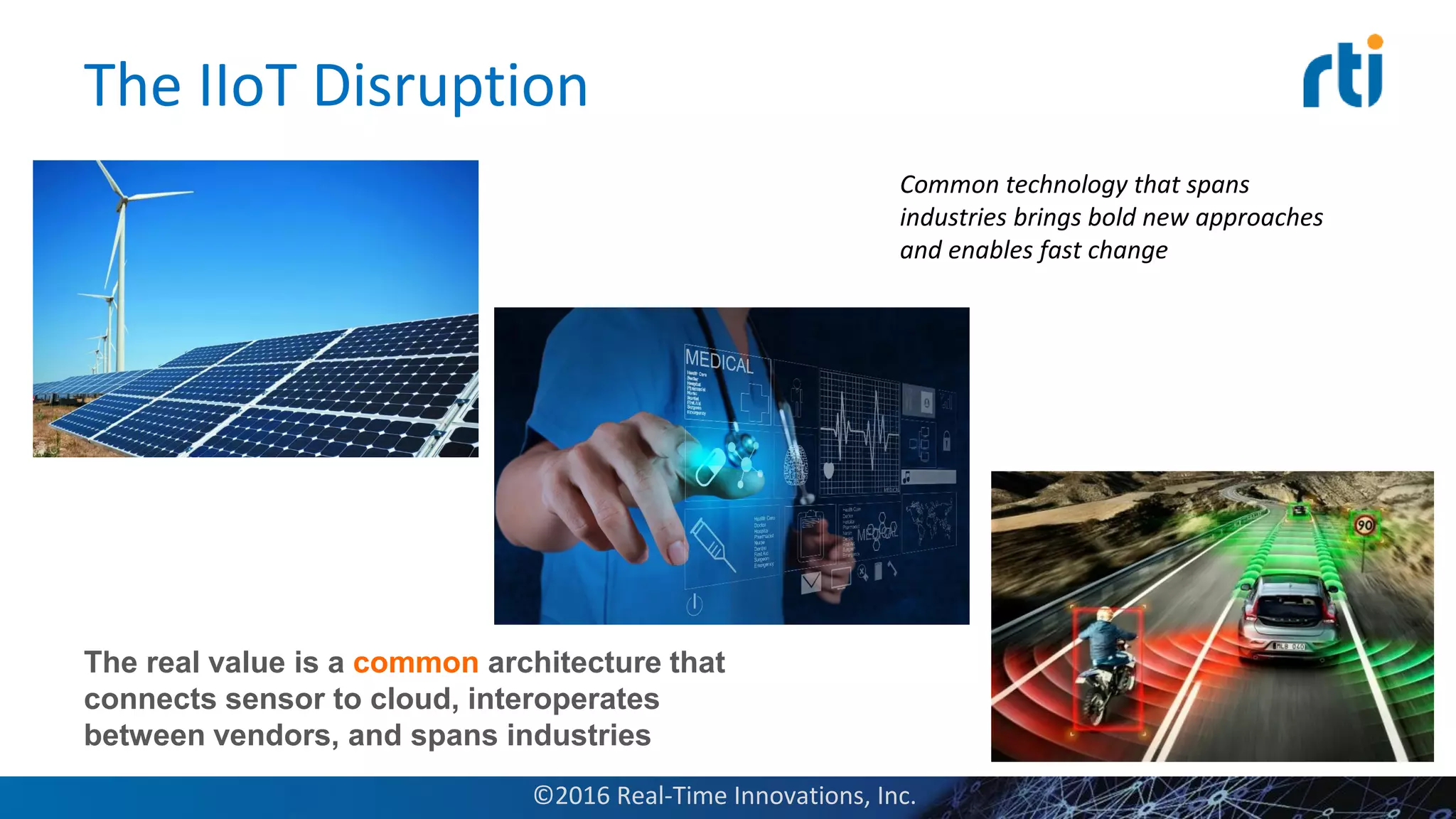
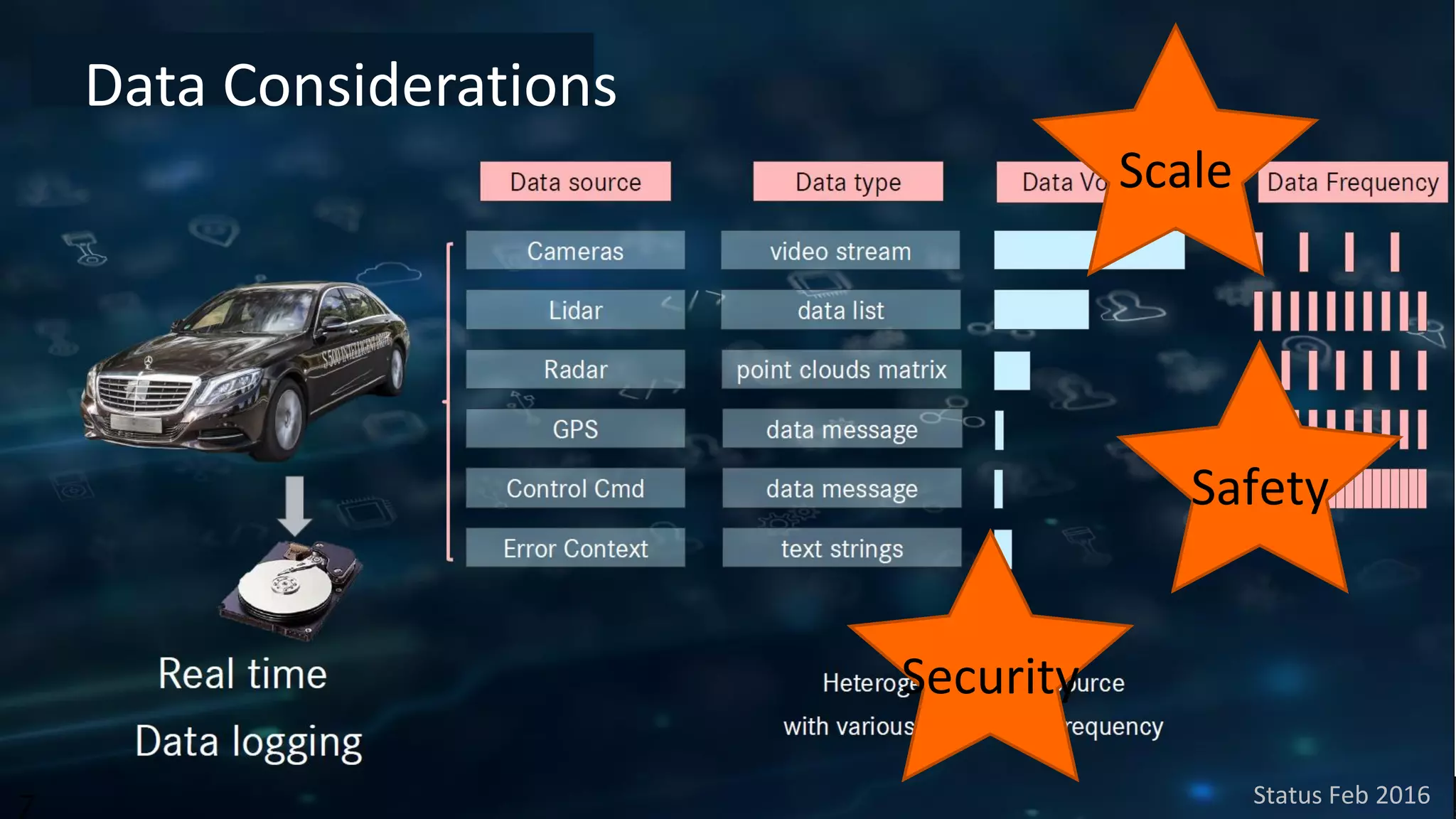
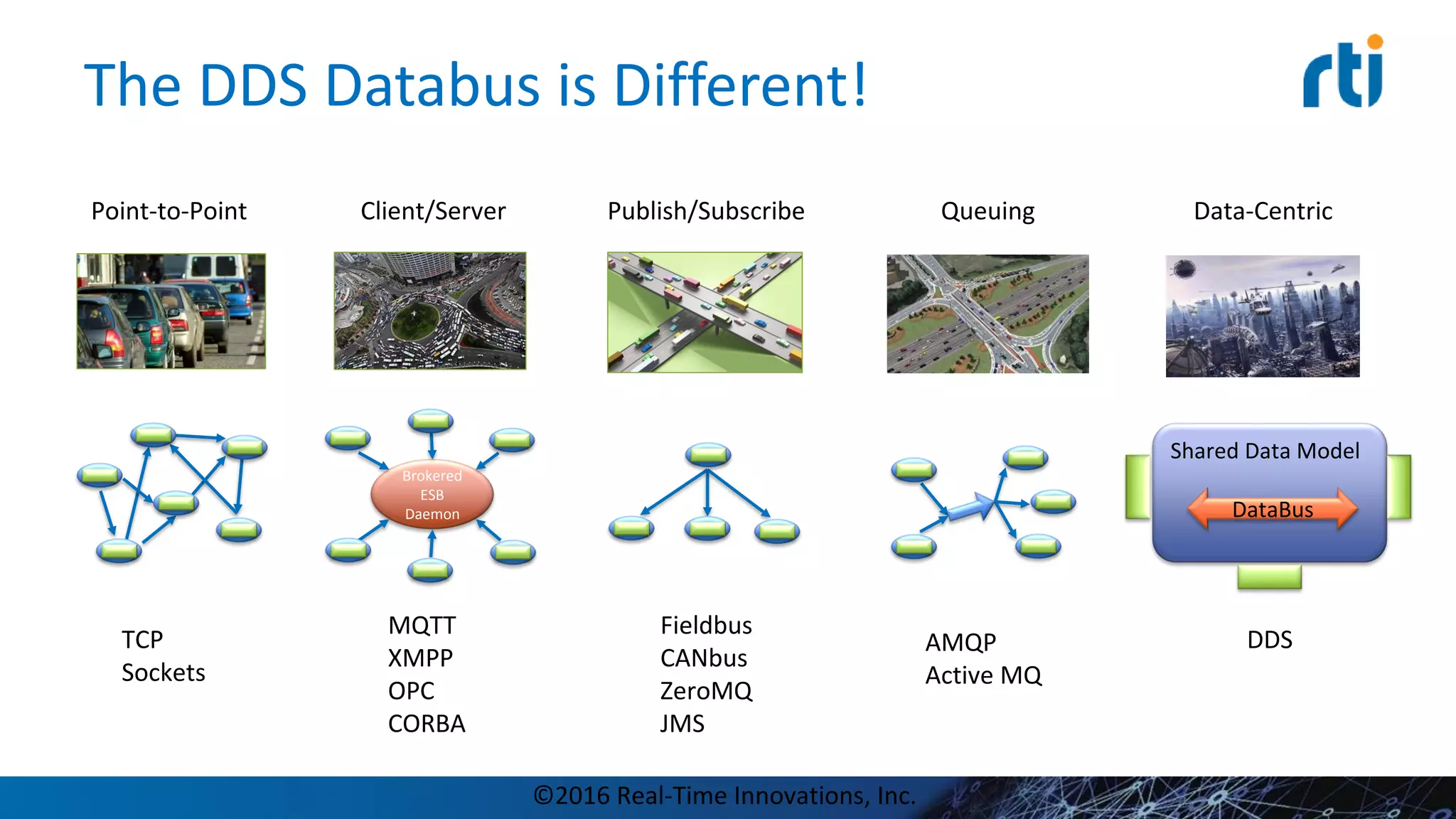
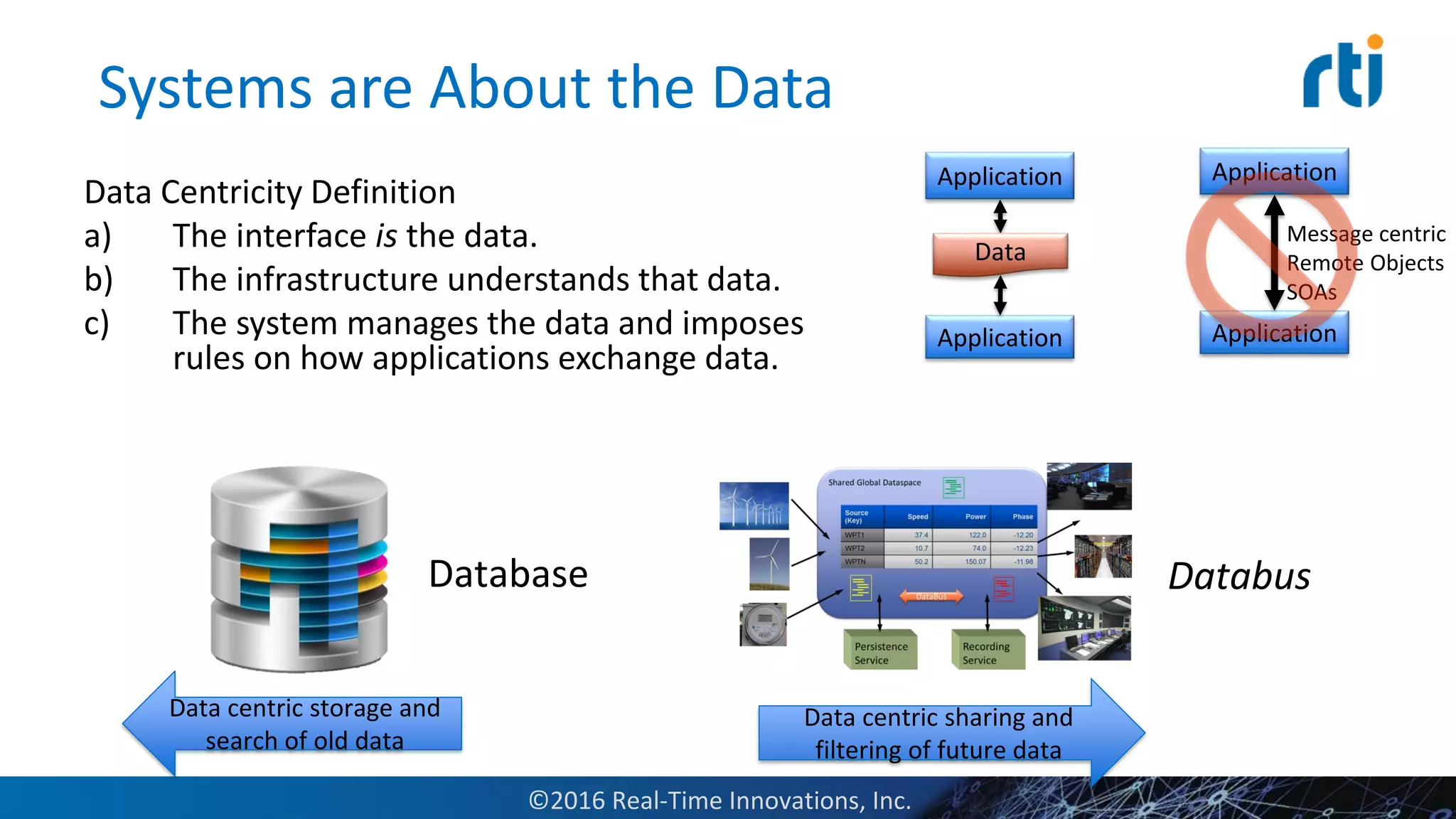
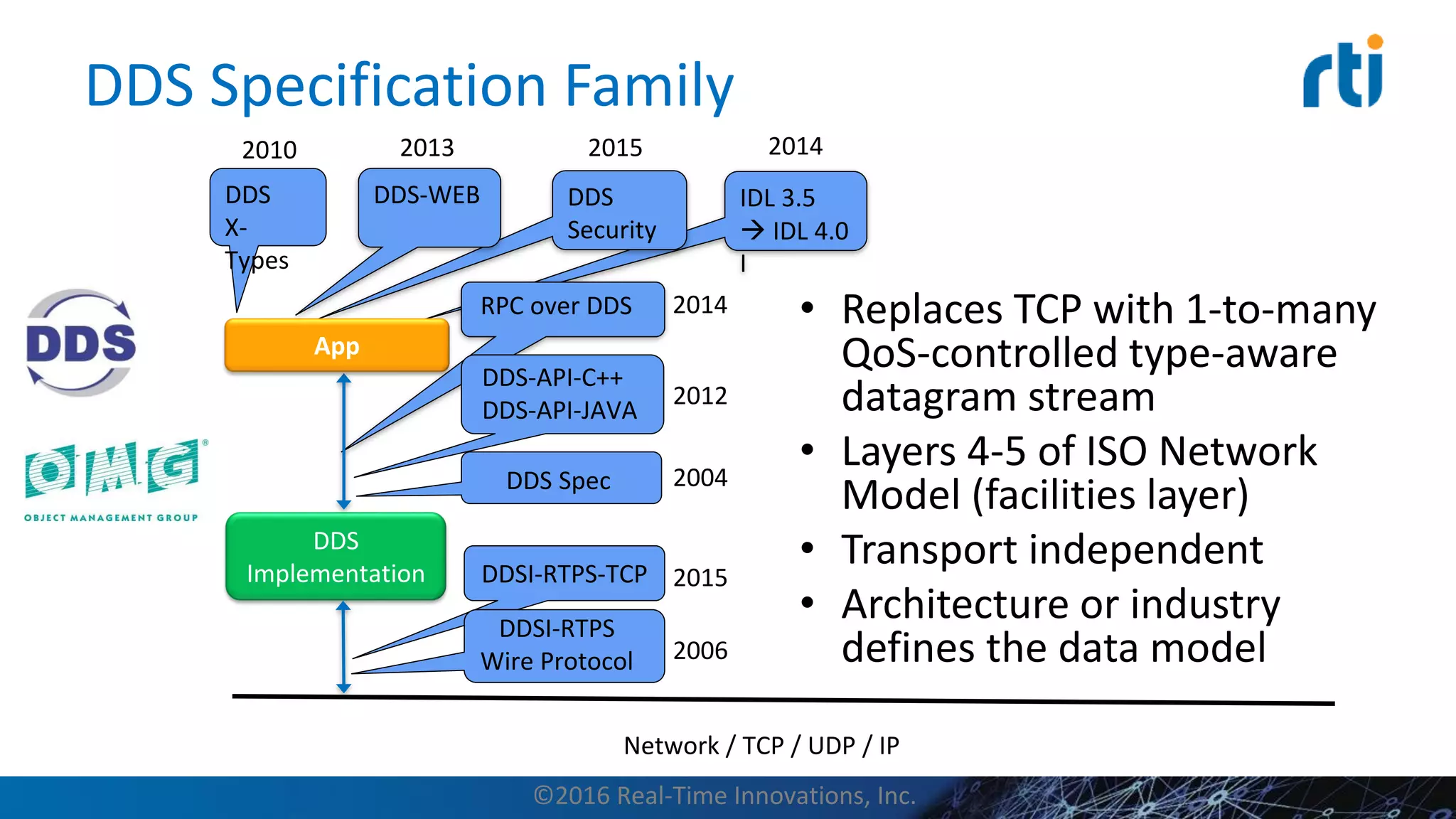
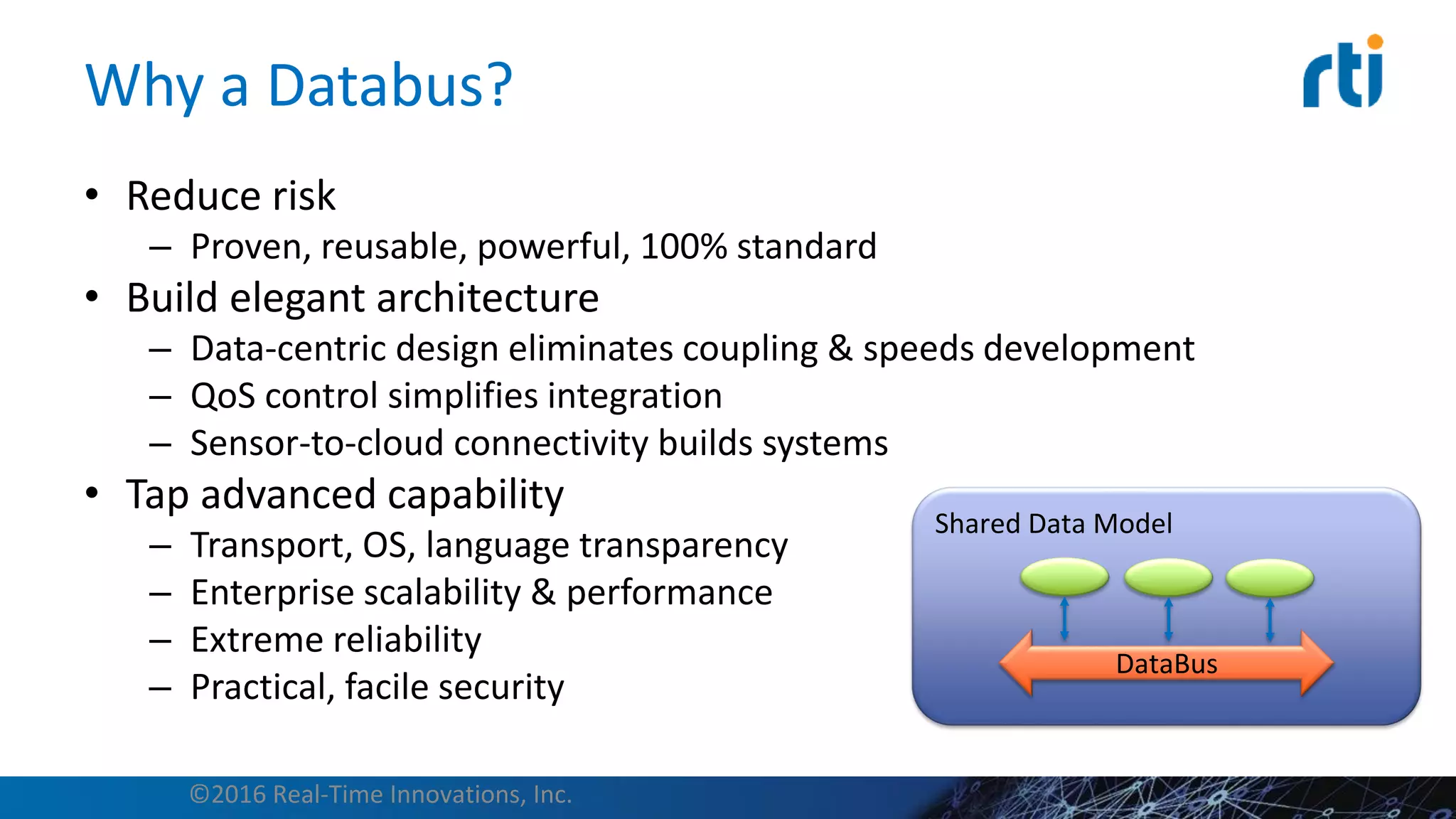
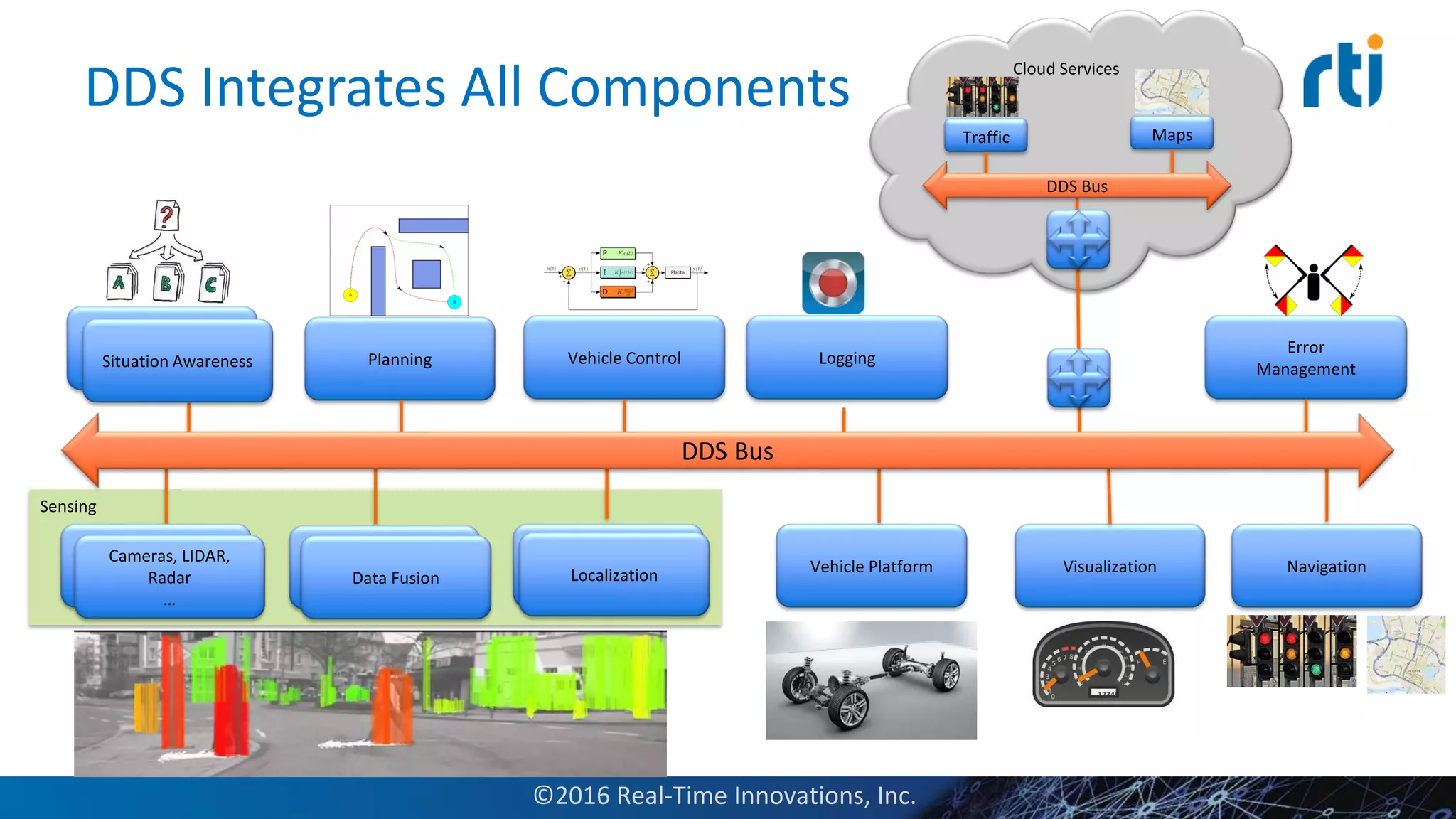
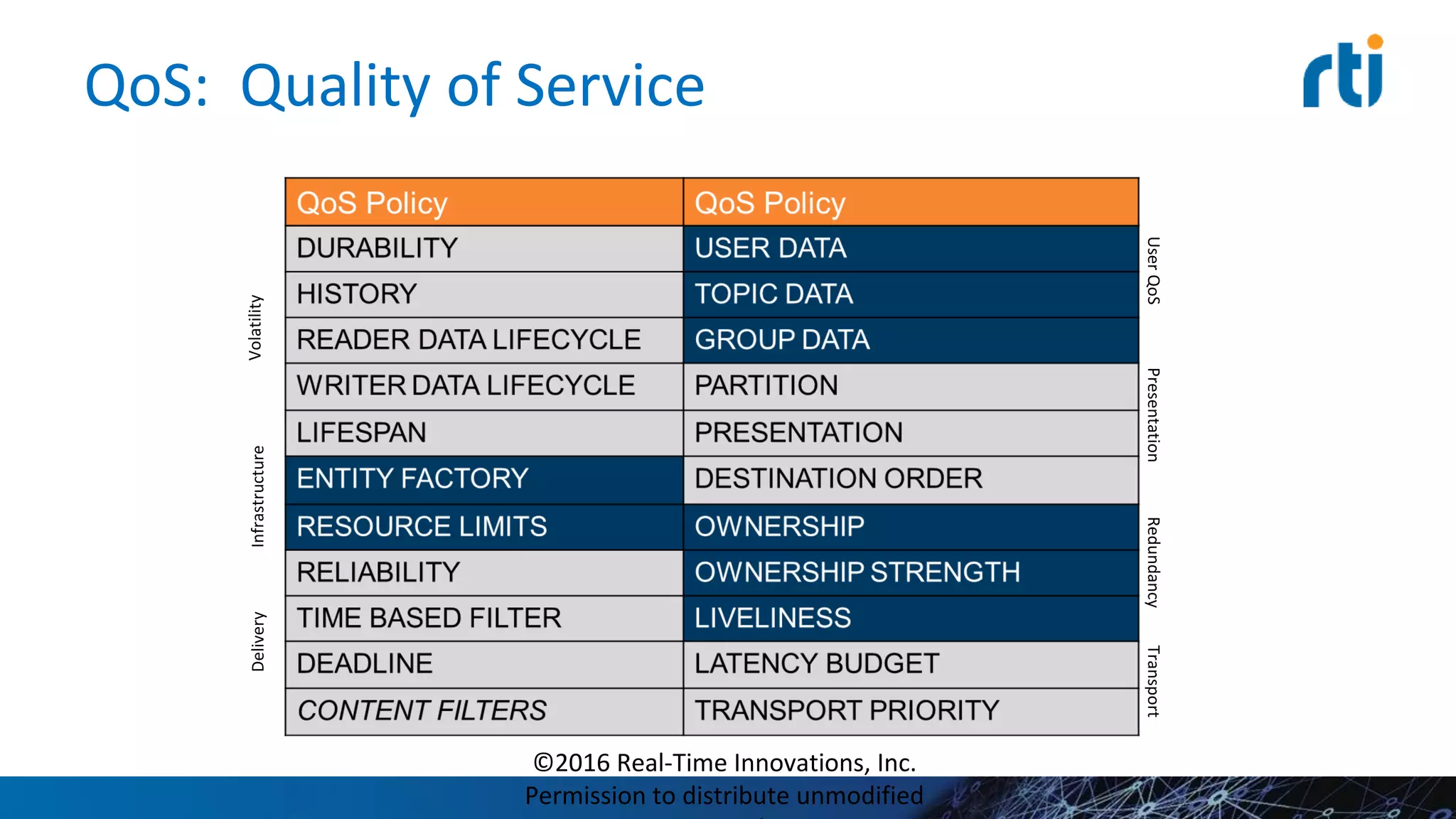
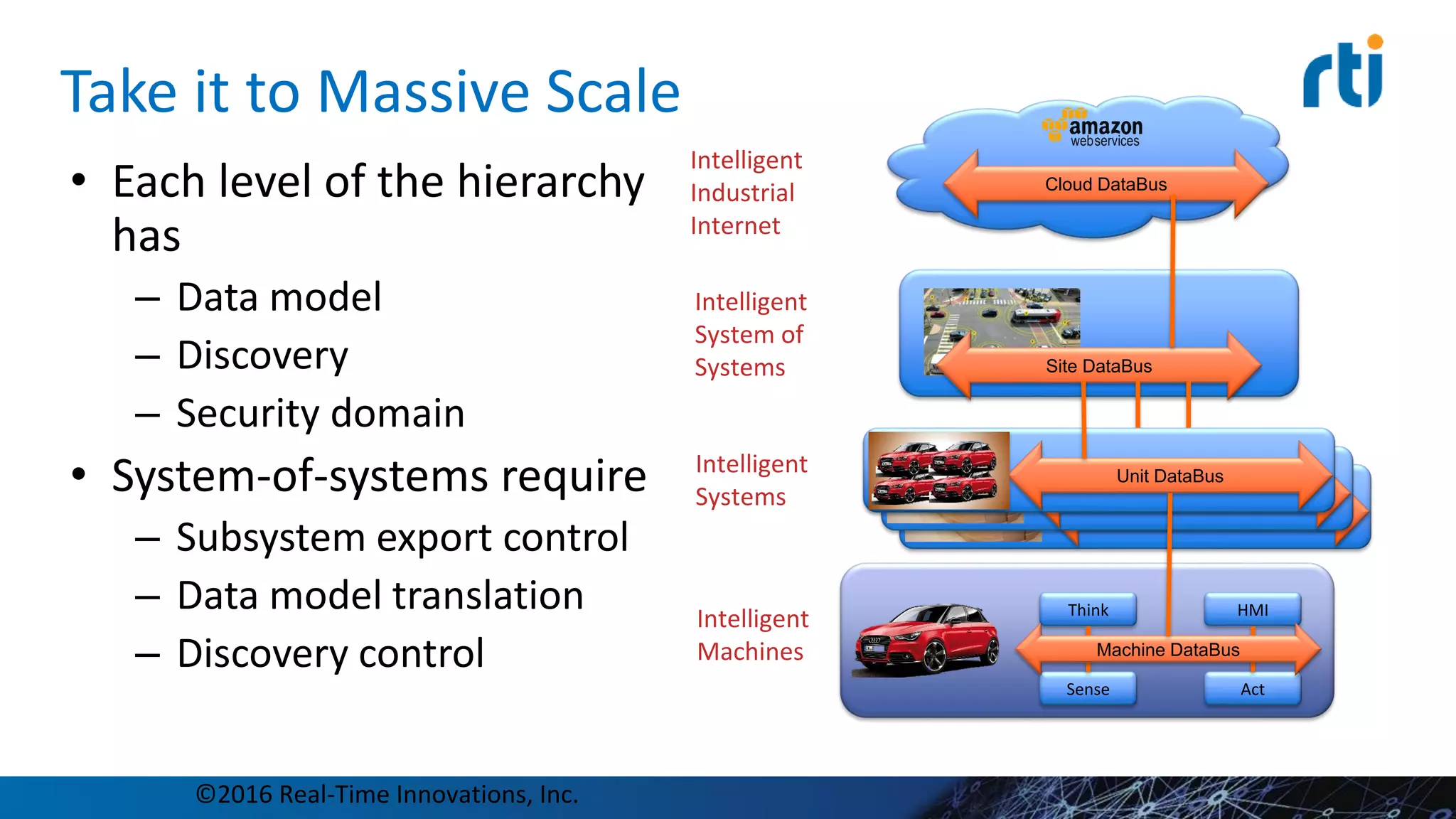
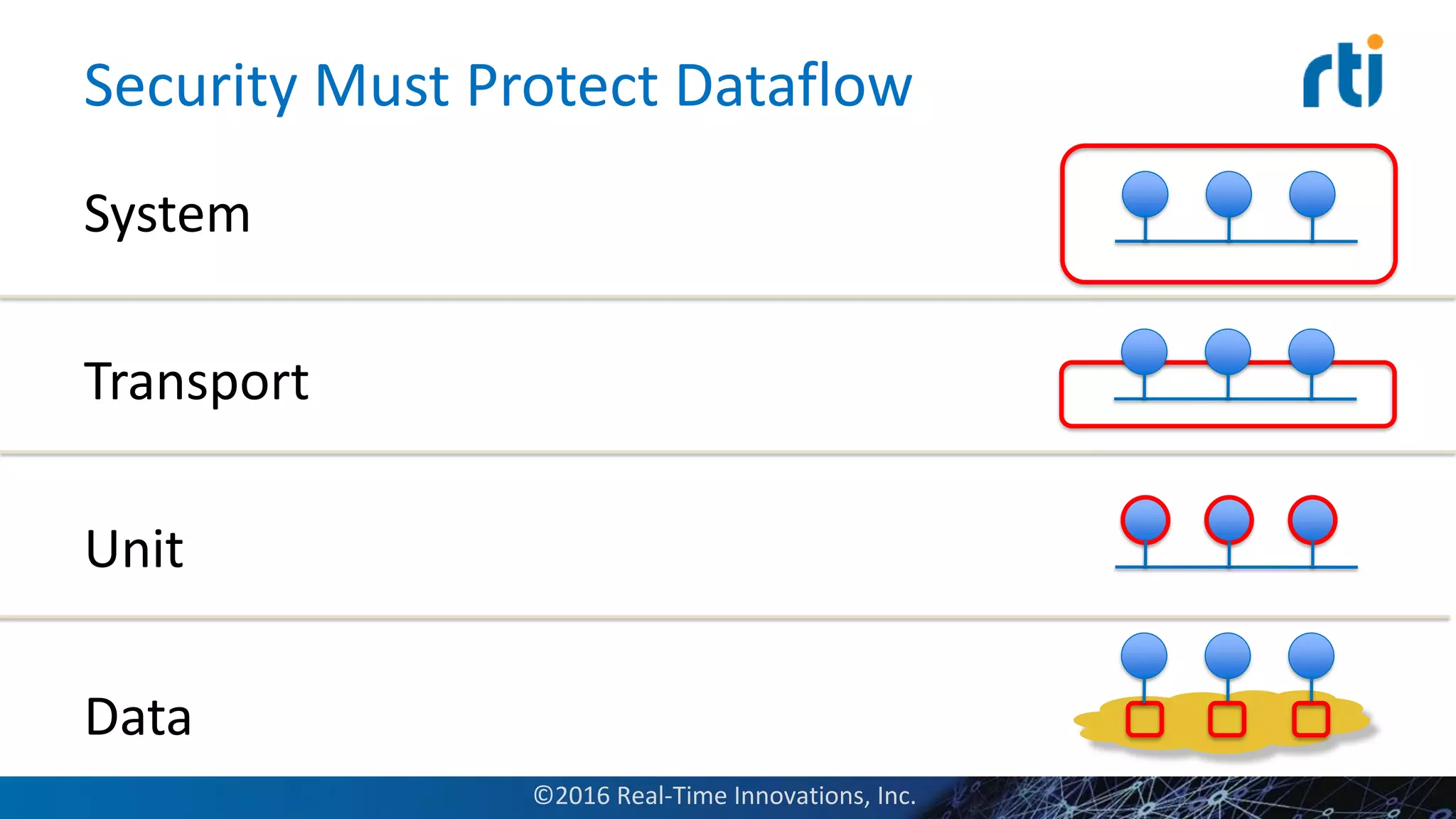
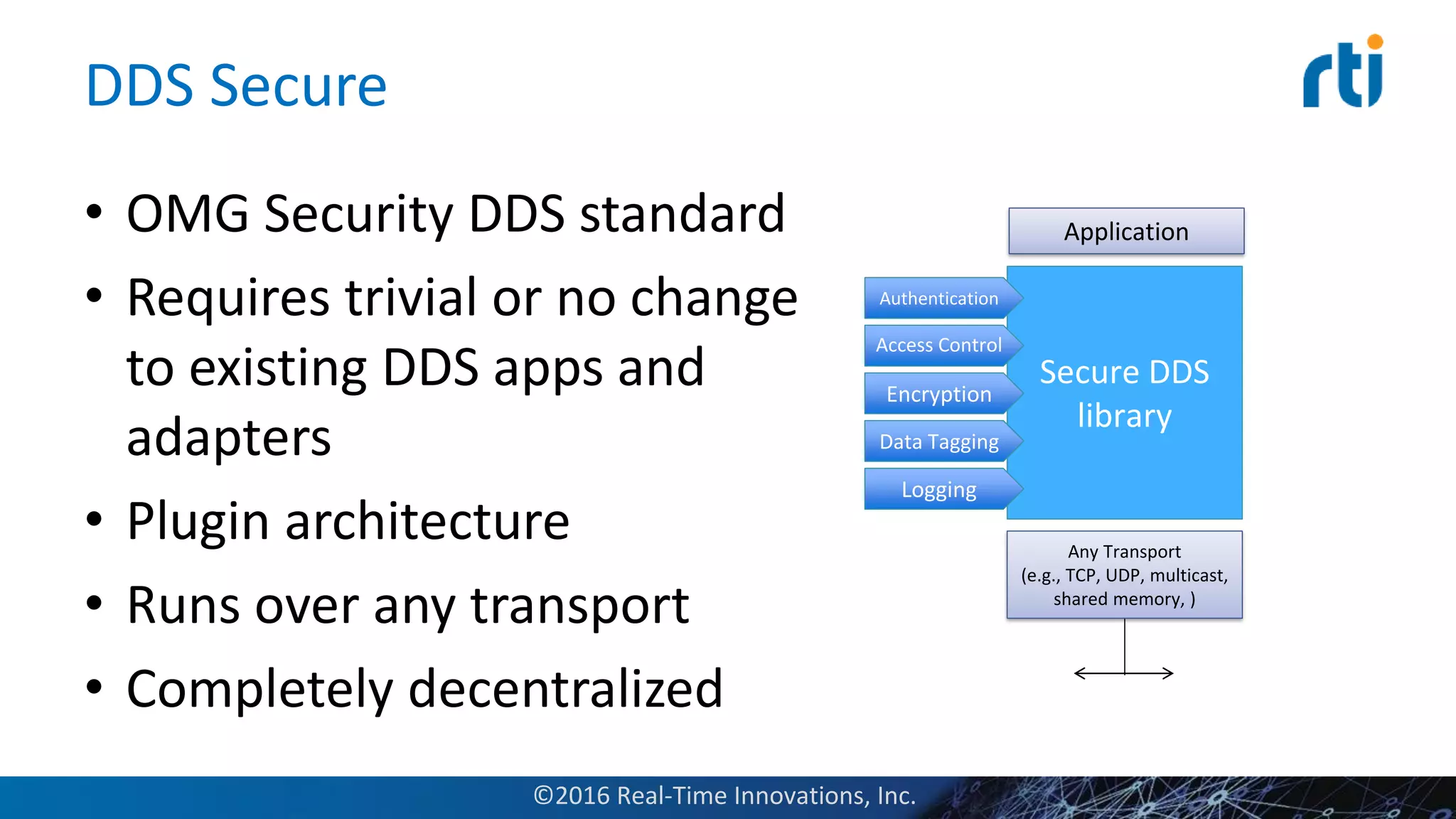
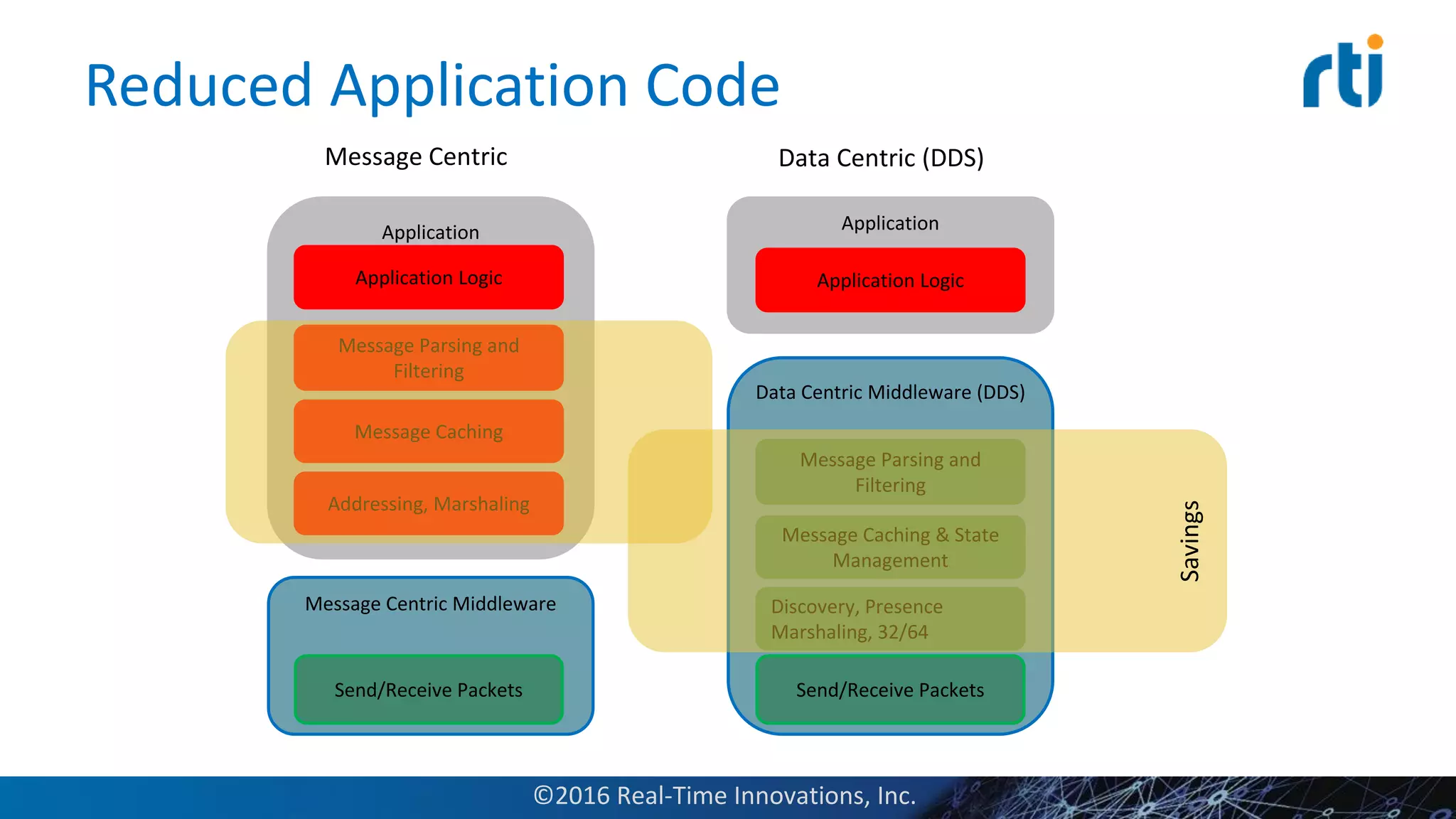
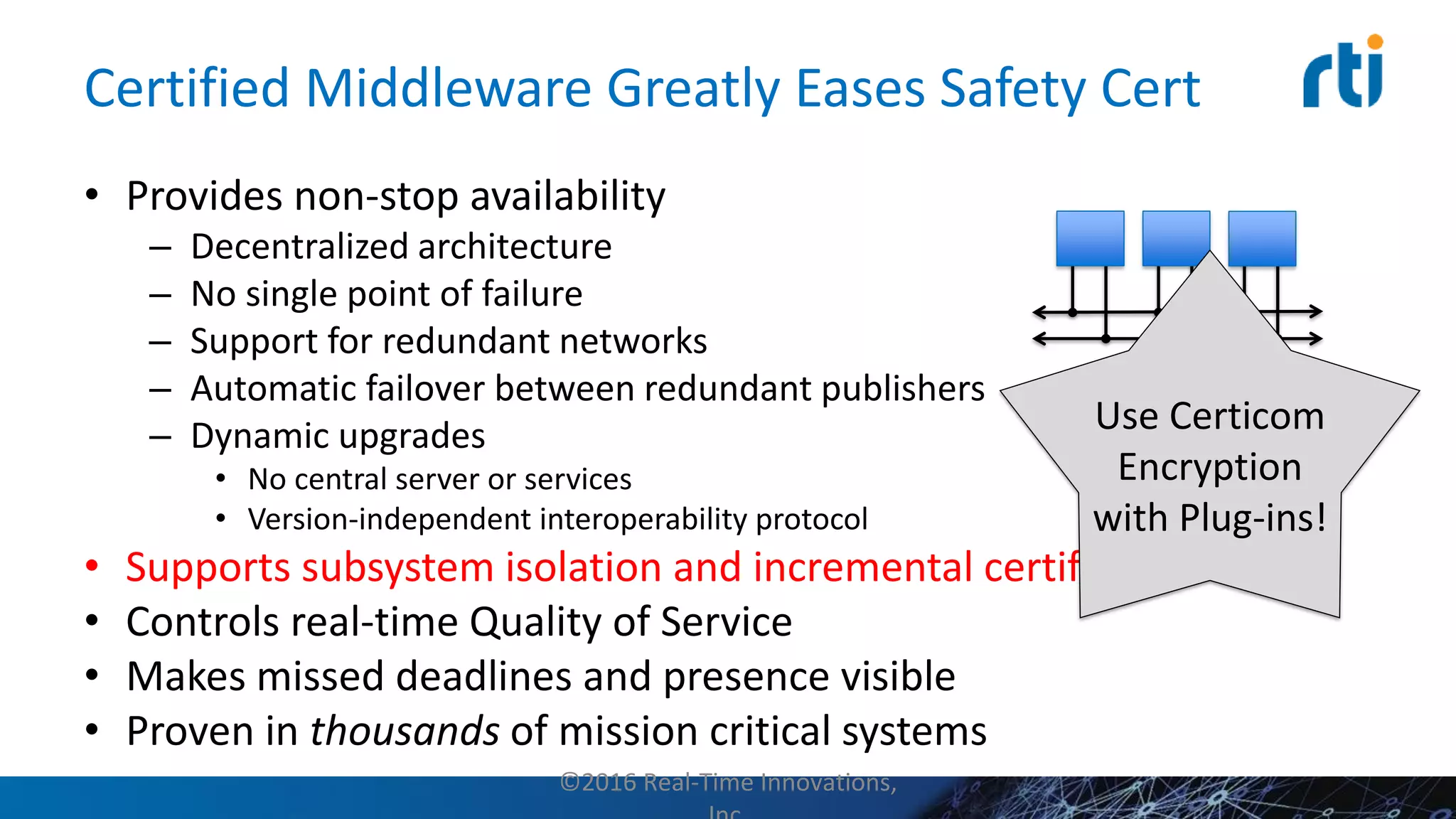
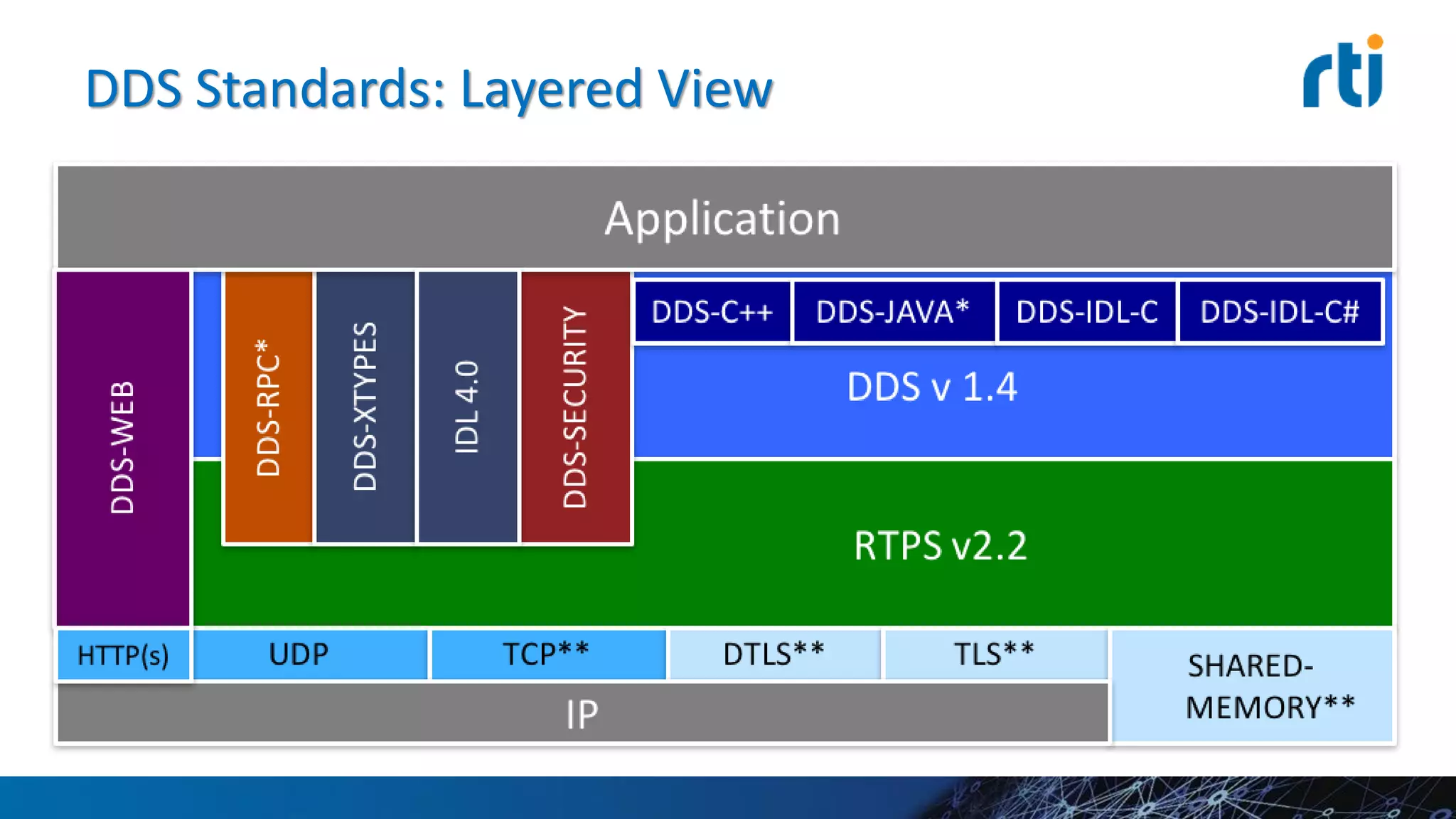
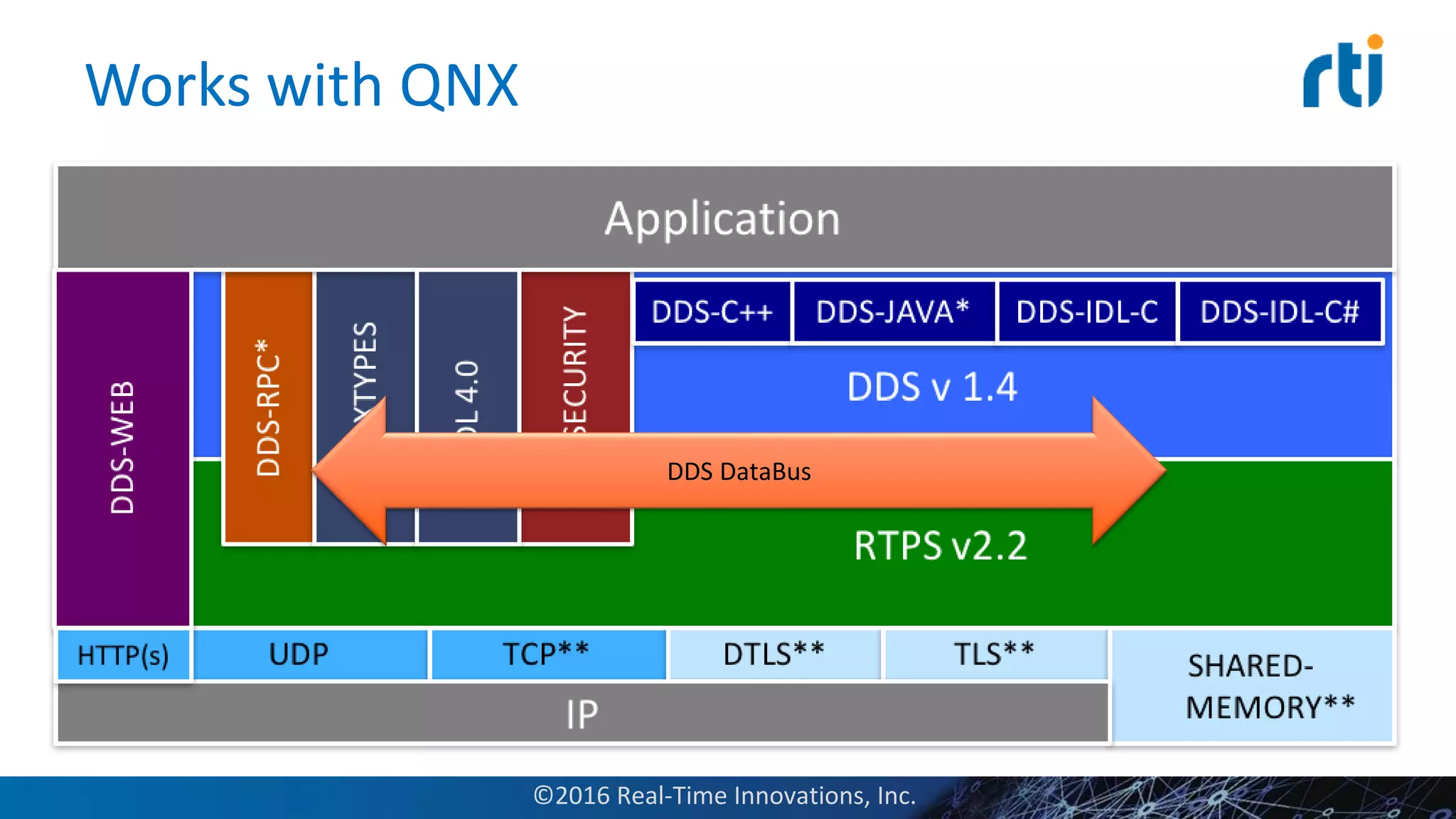

This document summarizes a presentation on developing autonomous vehicle architectures. It discusses using a data-centric middleware approach like the Data Distribution Service (DDS) standard to integrate sensors, fusion software, and control systems. DDS provides a common data model, quality of service controls, security features, and other benefits to help lower development risks. It also advocates consolidating electronic control units using a hypervisor and safety-certified operating system like QNX to isolate functions with different safety requirements. The presentation argues this is a lower-risk path to autonomous vehicle architecture than point-to-point and client-server approaches.