Download as PDF, PPTX

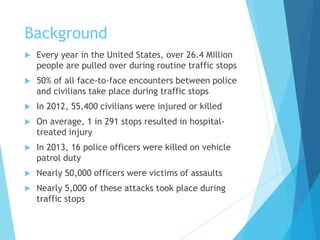
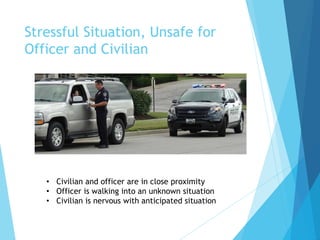
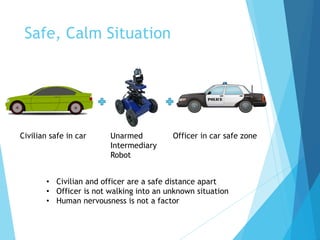
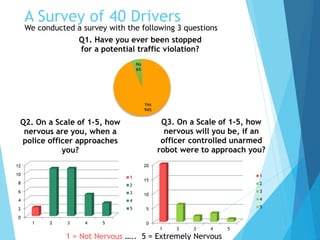
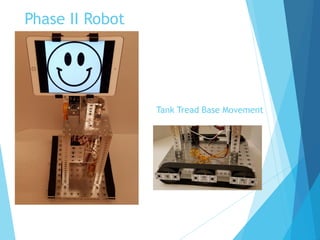



The document outlines the creation of a policebot designed to mediate between police officers and civilians during traffic stops to reduce tension and enhance safety. Key features include a non-threatening design, two-way communication, and the ability to handle various terrains, along with functions like ticket printing and license scanning. The development process involved extensive feedback from law enforcement professionals and aims for a prototype delivery within a year at an expected cost of $18,000.