Recommended
PPTX
PDF
パケットキャプチャの勘どころ Ssmjp 201501
PDF
PDF
PDF
PDF
ネットワークエンジニアはどこでウデマエをみがくのか?
PDF
PPTX
PDF
PPTX
Tensor コアを使った PyTorch の高速化
PDF
PDF
ブレインパッドにおける機械学習プロジェクトの進め方
PDF
PPTX
PDF
PDF
CTF超入門 (for 第12回セキュリティさくら)
PDF
RSA暗号運用でやってはいけない n のこと #ssmjp
PDF
PDF
PDF
PDF
深層学習による自然言語処理入門: word2vecからBERT, GPT-3まで
PDF
PDF
ネットワーク ゲームにおけるTCPとUDPの使い分け
PDF
PDF
PDF
PDF
PDF
PDF
PDF
More Related Content
PPTX
PDF
パケットキャプチャの勘どころ Ssmjp 201501
PDF
PDF
PDF
PDF
ネットワークエンジニアはどこでウデマエをみがくのか?
PDF
PPTX
What's hot
PDF
PPTX
Tensor コアを使った PyTorch の高速化
PDF
PDF
ブレインパッドにおける機械学習プロジェクトの進め方
PDF
PPTX
PDF
PDF
CTF超入門 (for 第12回セキュリティさくら)
PDF
RSA暗号運用でやってはいけない n のこと #ssmjp
PDF
PDF
PDF
PDF
深層学習による自然言語処理入門: word2vecからBERT, GPT-3まで
PDF
PDF
ネットワーク ゲームにおけるTCPとUDPの使い分け
PDF
PDF
PDF
PDF
PDF
Viewers also liked
PDF
PDF
PDF
H2O x mrubyで人はどれだけ幸せになれるのか
PDF
PDF
PPTX
Supercharge your Investments with Tax-Loss Harvesting
PPTX
#ABC17 : Alphabet of Innovations, Academic Concepts and Emerging Movements
PDF
PPT
De felipe iii a carlos ii
PDF
Bienvenidos actualizando información sobre BETT & ISE 2017
PPTX
Popular Struggles & Movements
PPT
PDF
PDF
Offshore Maintenance Success: Adding $434M to the Bottom Line
DOCX
Insignias digitales. trabajo final.Lucy Fernández
PDF
Finansijski izvjestaj o radu za 2016. godinu - Župa u srcu
ODP
Lipril (Lisinopril Dihydrate Tablets)
PDF
Prepare se para sua startup de sucesso!
PPTX
PDF
Event Report - Worforce Software Vision 2017 - Time to start the boosters
Similar to tcpdumpとtcpreplayとtcprewriteと他。
PDF
PDF
PDF
PDF
Hokkaido.cap #osc11do Wiresharkを使いこなそう!
PDF
Scapy presentation Remake(訂正)
PPTX
LinAction Theme LPICの問題を解いてみる~ネットワーク編~
PDF
Hokkaido.cap#1 Wiresharkの使い方(基礎編)
PDF
PPTX
PDF
Hokkaido.cap#7 ケーススタディ(セキュリティ解析:前編)
PDF
PDF
PDF
Hokkaido.cap#2 一般的なプロトコルのパケットを覗いてみよう
PDF
PDF
Hokkaido.cap#3 ケーススタディ(基礎編)
PDF
Hokkaido.cap#10 実践パケット解析まとめ
PDF
Wiresharkで検出できないチャットプログラム
PDF
パケットキャプチャの定番! Wiresharkのインストールとミニ紹介
PDF
Security.gs fes 2010 in tokyo
PDF
More from (^-^) togakushi
PPTX
PDF
PDF
PDF
PDF
ODP
OpenSSH User EnumerationTime-Based Attack と Python-paramiko
PDF
ODP
ODP
PDF
PDF
PDF
PDF
PDF
PPT
Recently uploaded
PDF
PMBOK 7th Edition_Project Management Process_WF Type Development
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
PDF
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
PDF
PMBOK 7th Edition Project Management Process Scrum
PDF
PMBOK 7th Edition_Project Management Context Diagram
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
tcpdumpとtcpreplayとtcprewriteと他。 1. tcpdump
と
tcpreplay
と
tcprewrite
と他。
#ssmjp 2013/03/29 @togakushi
2. パケット好きですか?
● tcpdump ってコマンドで好きなだけみれま
す!
● 要 root
– NIC が promiscuous mode へ
– 流れてきたパケットは無差別に拾うモード
– 通常は自分宛てのパケットしか処理しない
3. 切り分けに超役立つ
● ちゃんと相手から届いてるかわかる
● 誰から送られてきてるかわかる
● 暗号化されてるかわかる
4. インテリジェントなスイッチ
● MAC アドレスの学習
– 接続されたポートの先に何が繋がってるか知って
いる
– tcpdump を動かすマシンから見ると、自分宛のパ
ケットしか流れてこない><
● 気になるあの子 ( サーバ ) のパケットも見た
い!
(注:他人の通信を覗くのはダメですよ)
5. こんなこともあろうかと!
● ミラーポート
– 超賢いスイッチはパケットをコピーして複数のポ
ートに流せる
● タップ
– 物理的に出力を 2 つに分ける
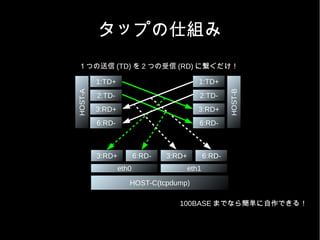
6. タップの仕組み
1つの送信 (TD) を 2 つの受信 (RD) に繋ぐだけ!
1:TD+ 1:TD+
HOST-B
HOST-A
2:TD- 2:TD-
3:RD+ 3:RD+
6:RD- 6:RD-
3:RD+ 6:RD- 3:RD+ 6:RD-
eth0 eth1
HOST-C(tcpdump)
100BASE までなら簡単に自作できる!
7. ハニーネットで大活躍ですね!
1:TD+ 1:TD+
H 2:TD- 2:TD-
Sniffer
U
B 3:RD+ 3:RD+
6:RD- 6:RD-
受信専用ケーブル
※ 賢くない HUB に繋いで使います
8. 自分宛てのが見れれば十分です
● 全部見ると大変→フィルタを使う
# tcpdump -i any -nn port 80
# tcpdump -i any -nn host 192.168.1.1 and port 80
# tcpdump -i any -nn not port 22 and not port 3389
● ペイロードまで見たい
# tcpdump -i any -nn -x
# tcpdump -i any -nn -X
小文字: Hex ダンプだけ
大文字:アスキー付き
9. キャプチャサイズがデカいと疲れる
● 自動分割(出力先ファイルの切り替え)
– サイズ分割
# tcpdump -i eth0 -C 10 -Z root -w tcpdump.pcap
-C file_size(MB) -Z root を指定する
# ls tcpdump*
tcpdump.pcap tcpdump.pcap.1 tcpdump.pcap.2 ...
– 時間分割
# tcpdump -i eth0 -G 60 -Z root -w tcpdump_%Y%m%d-%H%M%S.pcap
-G rotate_seconds -w strftime の書式文字列を含める
# ls tcpdump*
tcpdump_20120909-000740.pcap tcpdump_20120909-000840.pcap
tcpdump_20120909-000940.pcap ...
10. 取ったあとに分けたい
● tcpslice
– 指定時間の範囲で切り出し
● キャプチャされてる時間の確認( 3 種類)
% tcpslice -r tcpdump.pcap
tcpdump.pcap Wed Mar 27 11:44:11 2013 Wed Mar 27 11:44:23 2013
% tcpslice -t tcpdump.pcap
tcpdump.pcap 2013y03m27d11h44m11s817661u 2013y03m27d11h44m23s174956u
% tcpslice -R tcpdump.pcap
tcpdump.pcap 1364352251.817661 1364352263.174956
● 開始時間から相対的に指定も可能
% tcpslice 1364352251.817661 +10 -w new.pcap tcpdump.pcap
11. 別れたけどよりを戻したい
● mergecap
– くっつけたい pcap を順番に並べて出力ファイル
名を指定するだけ
% mergecap -w <outfile> <infile> [<infile> ...]
12. ペイロードで絞りたい?
● そんなときは「 ngrep 」
– 条件にマッチしたパケットだけ表示する grep のネ
ットワーク版
– オプションも grep とだいたい共通
● -i :大文字小文字の無視
● -w :単語にマッチ
● -v :マッチしないものを表示
● -X : 16 進数のストリングで指定
# ngrep [option] < match expression > < bpf filter >
# ngrep -q -d eth0 '' port 80
13. ngrep
● -K < 回数 >
– マッチしたパケットに RST を投げる ( 通信の切
断)
– 簡単な L7FW に
– リモートのサーバで「 ngrep -K 1 」ってやると死
ぬ
14. grep があるなら sed だって
● netsed
– ネットワークストリームエディタ
– 条件にマッチしたペイロードの文字列を書き換え
# netsed [<proto>] <lport> <rhost> <rport> <rule1> [<rule2> ...]
# netsed 8080 192.168.1.1 80 's/google/yahoo'
→localhost:8080 に繋ぐと 192.168.1.1:80 に転送
双方向のパケットでルールに基いて書き換え
15. 16. でもやっぱり CLI だよね
● tshark の出番
– wireshark に付属
– wireshark の CLI 版
% tshark -r x.pcap
1 0.000000 192.168.100.101 -> 192.168.100.102 TCP 74 49924 > http [SYN] Seq=0 Win=...
2 0.000567 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=1 Ack=...
3 0.000697 192.168.100.101 -> 192.168.100.102 HTTP 223 GET / HTTP/1.1
4 0.007204 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=158 Ack=...
5 0.007224 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=158 Ack=...
6 0.007320 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=158 Ack=...
7 0.007517 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=158 Ack=...
8 0.007580 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [FIN, ACK] Seq=158 ...
9 0.007625 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=159 Ack=...
17. 18. tcpreplay
● tcpdump で取得したパケット (pcap) の内容を
ネットワークに流す
– FW や IDS のテストで使用
– 全部まとめて流したり、 1 パケットずつ(選択し
て)流したり、帯域を絞って流したり、繰り返し
流したり
19. tcprewrite
● pcap の内容を書き換える
● tcpreplay の補助ツール
– IP アドレスの書き換え(送信/受信)
– MAC アドレスの書き換え ( 〃 )
– VLAN タグの書き換え(削除/追加)
20. 参考文献
● http://wiki.wireshark.org/CaptureSetup/Ethernet
● man tcpdump
● man tcpreplay / tcprewrite








![別れたけどよりを戻したい
● mergecap
– くっつけたい pcap を順番に並べて出力ファイル
名を指定するだけ
% mergecap -w <outfile> <infile> [<infile> ...]](https://image.slidesharecdn.com/ssmjp-201303-130329174903-phpapp02/85/tcpdump-tcpreplay-tcprewrite-11-320.jpg)
![ペイロードで絞りたい?
● そんなときは「 ngrep 」
– 条件にマッチしたパケットだけ表示する grep のネ
ットワーク版
– オプションも grep とだいたい共通
● -i :大文字小文字の無視
● -w :単語にマッチ
● -v :マッチしないものを表示
● -X : 16 進数のストリングで指定
# ngrep [option] < match expression > < bpf filter >
# ngrep -q -d eth0 '' port 80](https://image.slidesharecdn.com/ssmjp-201303-130329174903-phpapp02/85/tcpdump-tcpreplay-tcprewrite-12-320.jpg)
![grep があるなら sed だって
● netsed
– ネットワークストリームエディタ
– 条件にマッチしたペイロードの文字列を書き換え
# netsed [<proto>] <lport> <rhost> <rport> <rule1> [<rule2> ...]
# netsed 8080 192.168.1.1 80 's/google/yahoo'
→localhost:8080 に繋ぐと 192.168.1.1:80 に転送
双方向のパケットでルールに基いて書き換え](https://image.slidesharecdn.com/ssmjp-201303-130329174903-phpapp02/85/tcpdump-tcpreplay-tcprewrite-14-320.jpg)

![でもやっぱり CLI だよね
● tshark の出番
– wireshark に付属
– wireshark の CLI 版
% tshark -r x.pcap
1 0.000000 192.168.100.101 -> 192.168.100.102 TCP 74 49924 > http [SYN] Seq=0 Win=...
2 0.000567 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=1 Ack=...
3 0.000697 192.168.100.101 -> 192.168.100.102 HTTP 223 GET / HTTP/1.1
4 0.007204 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=158 Ack=...
5 0.007224 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=158 Ack=...
6 0.007320 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=158 Ack=...
7 0.007517 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=158 Ack=...
8 0.007580 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [FIN, ACK] Seq=158 ...
9 0.007625 192.168.100.101 -> 192.168.100.102 TCP 66 49924 > http [ACK] Seq=159 Ack=...](https://image.slidesharecdn.com/ssmjp-201303-130329174903-phpapp02/85/tcpdump-tcpreplay-tcprewrite-16-320.jpg)