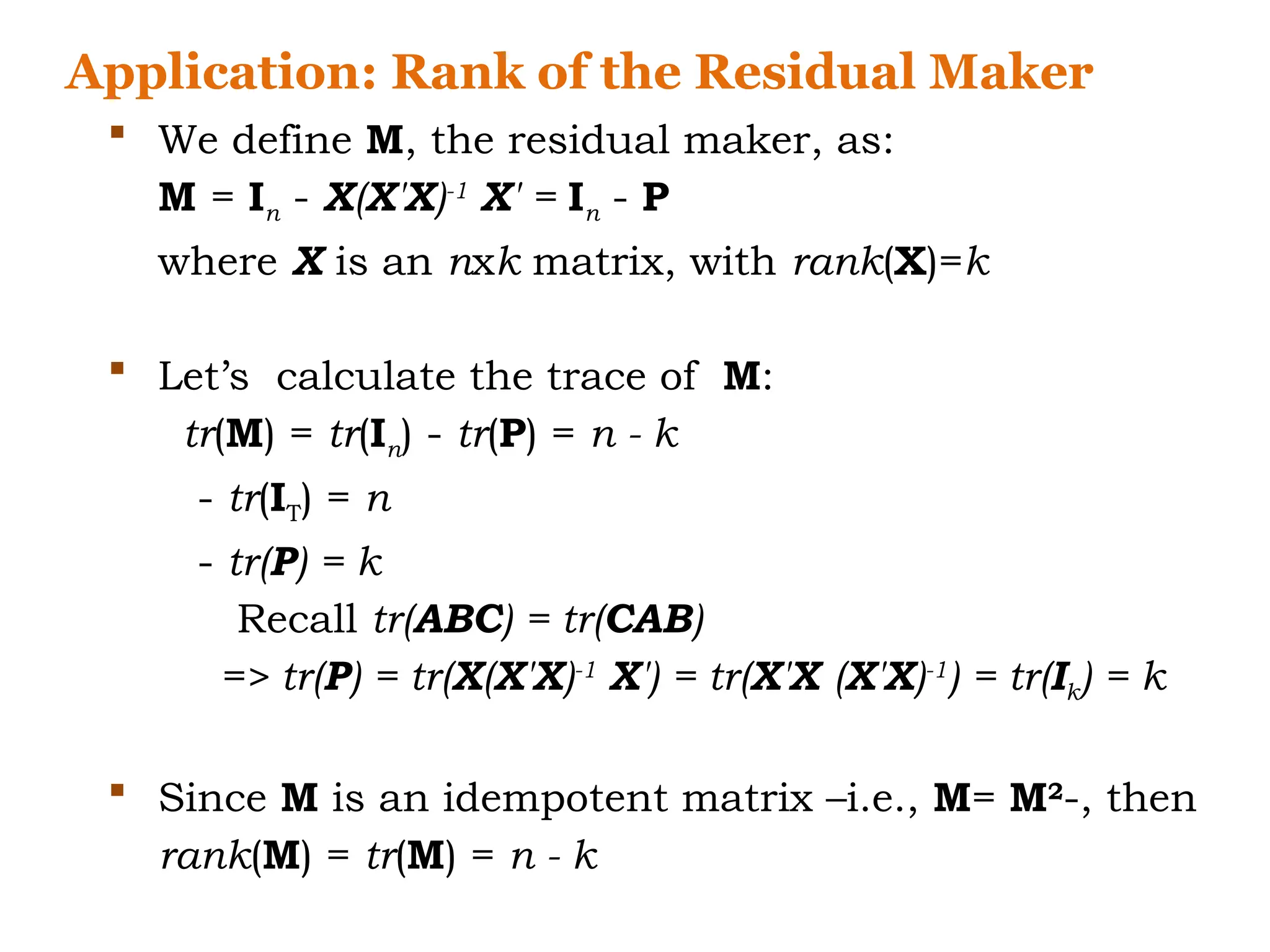
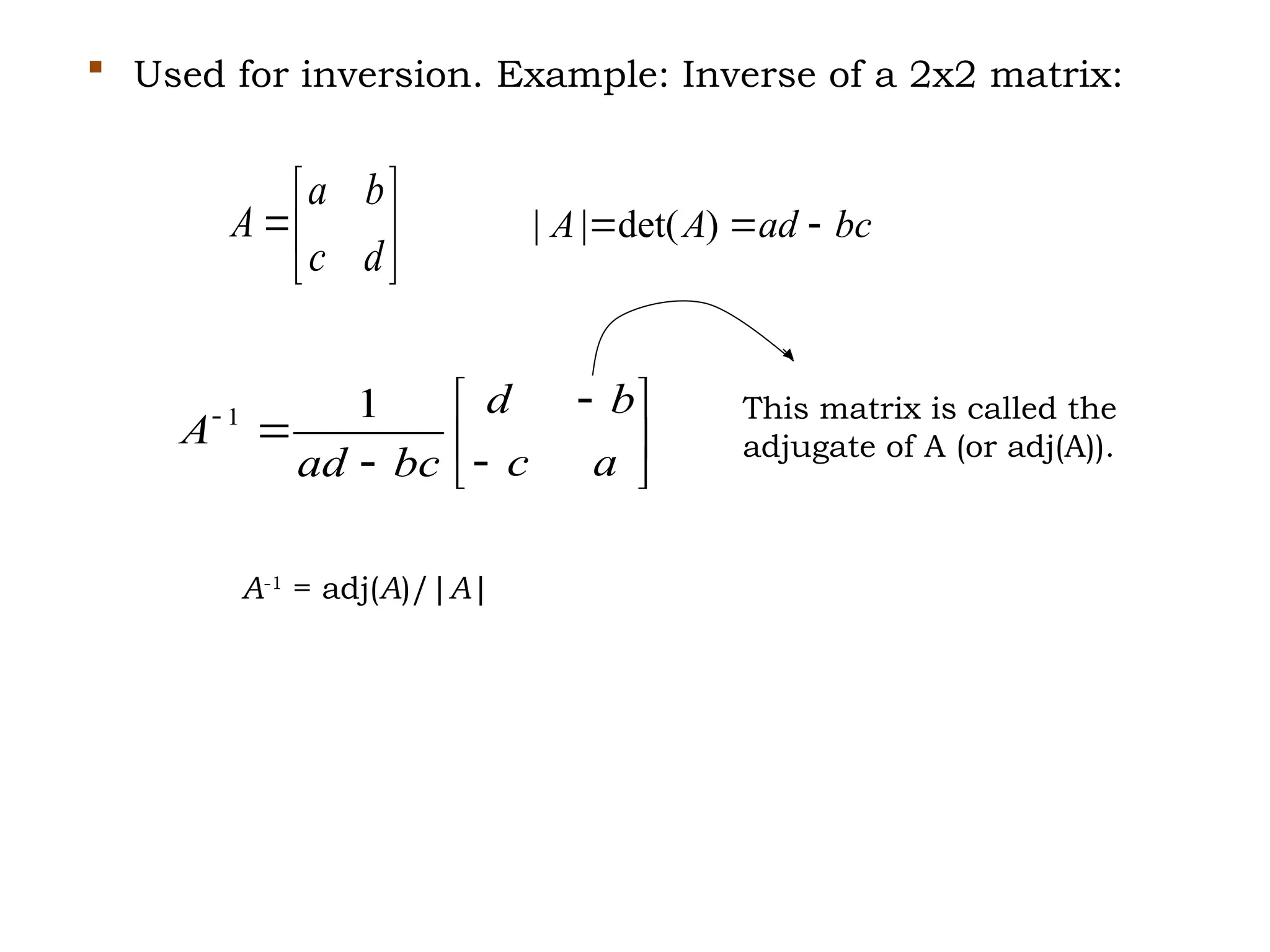
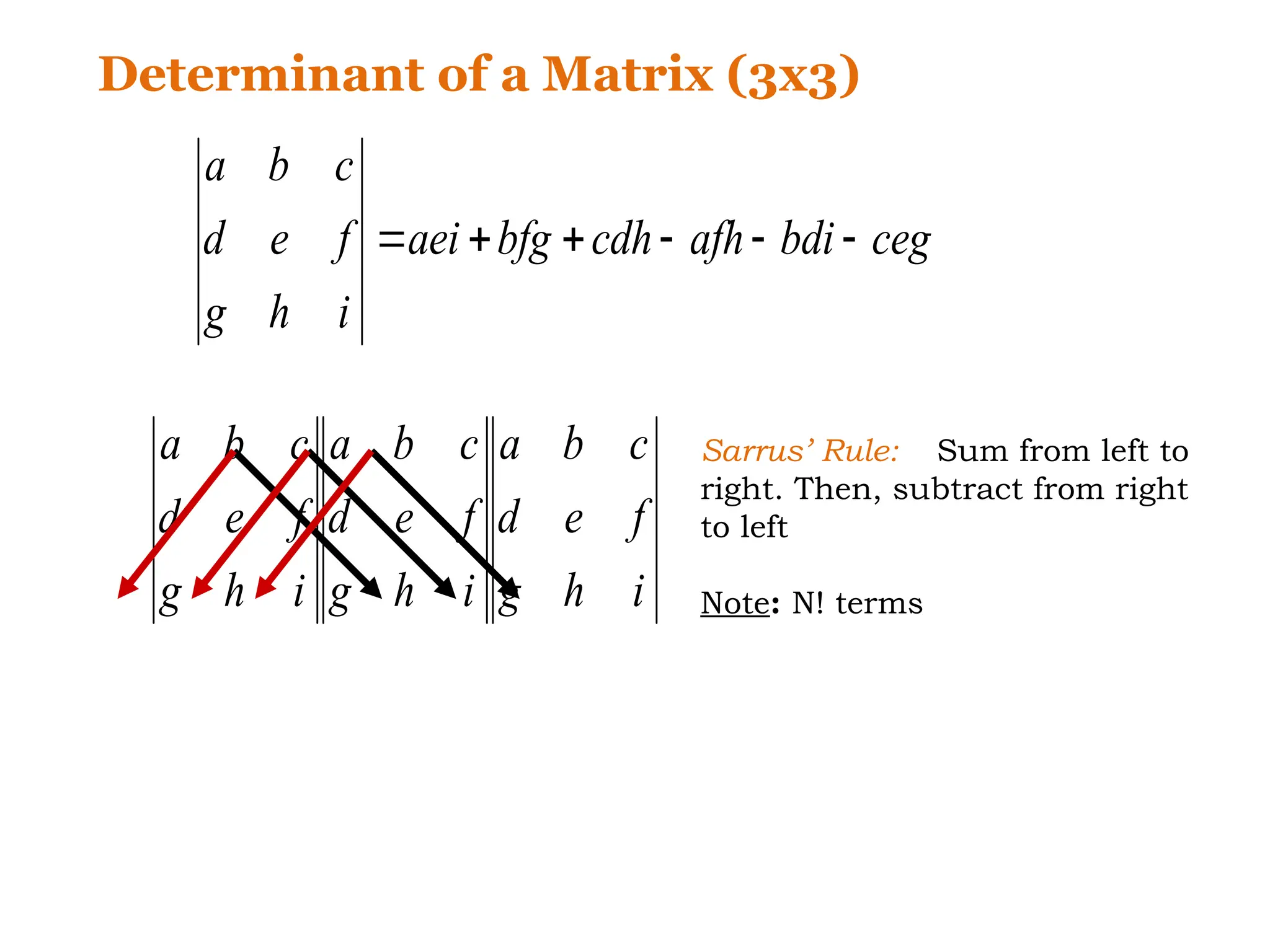
The document discusses the properties and calculations involved in finding the inverse of a matrix, emphasizing that a unique inverse exists only for square matrices. It outlines methods such as Gauss-Jordan elimination and highlights the properties of determinants, including how they relate to the invertibility of matrices. Key concepts like the trace of a matrix and its application in identifying residuals are also reviewed.

![Determination of the Inverse
(Gauss-Jordan Elimination)
AX = I
I X = K
I X = X = A-1
=> K = A-1
1) Augmented matrix
all A, X and I are (n x n)
square matrices
X = A-1
Gauss elimination Gauss-Jordan
elimination
UT: upper triangular
further row
operations
[A I ] [ UT H] [ I K]
2) Transform augmented matrix
Wilhelm Jordan (1842– 1899)](https://image.slidesharecdn.com/studymaterialforlecture1-240906184254-a6d76b4e/75/Study-material-for-matrix-and-determinant-pptx-4-2048.jpg)

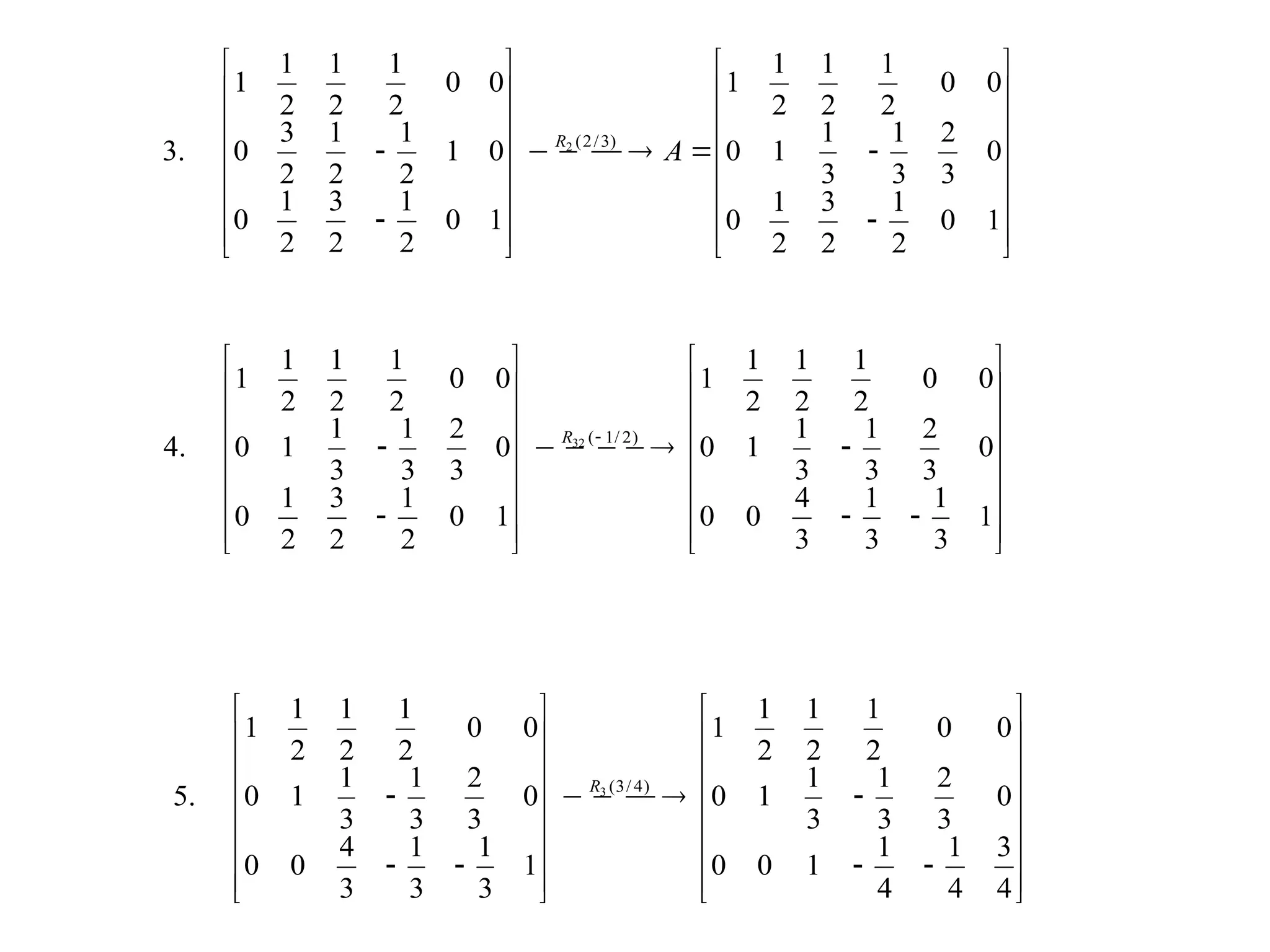
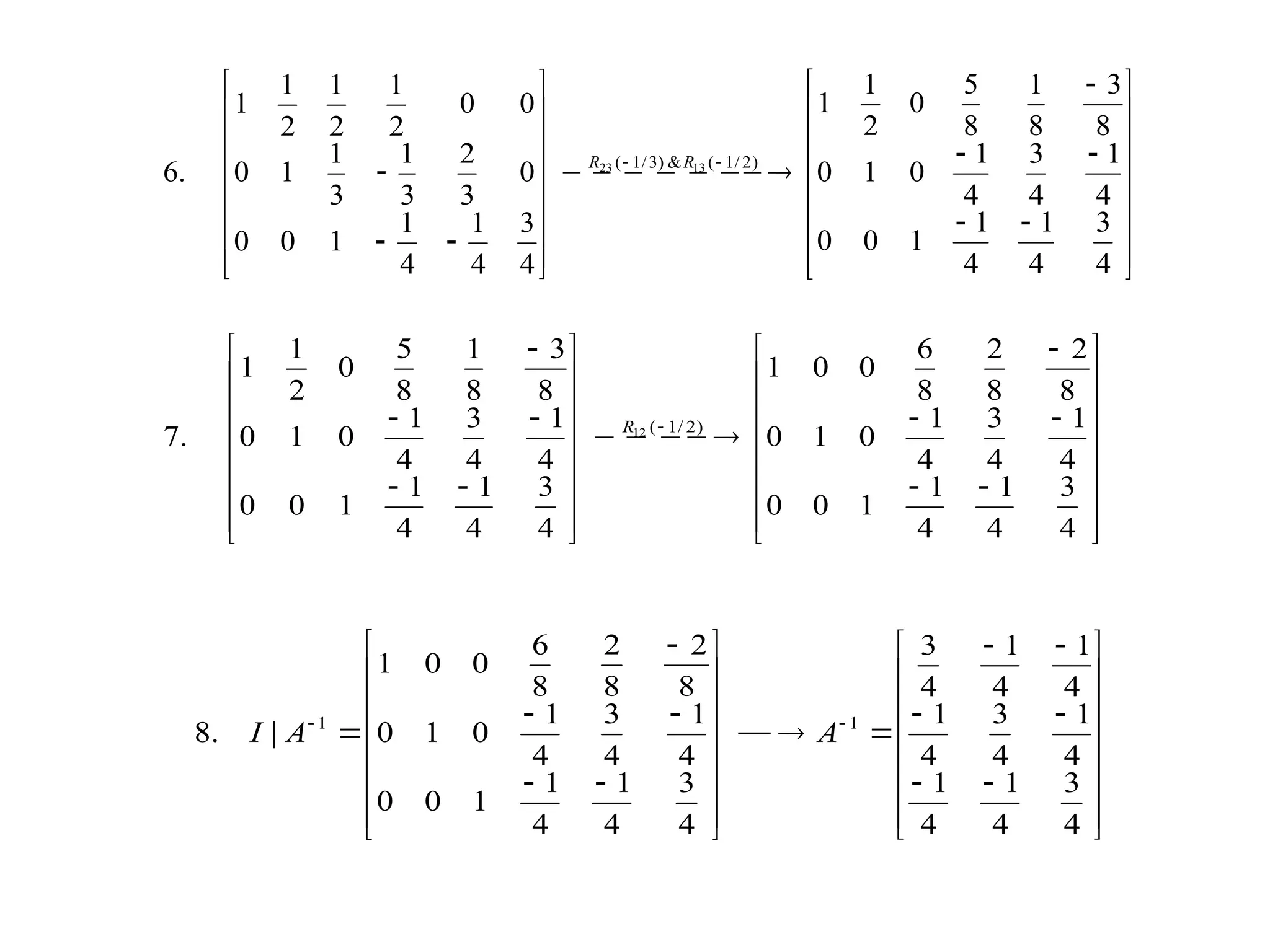
![Gauss-Jordan Elimination: Example 2
D
D
I
D
D
I
D
D
D
I
I
I
I
I
I
I
I
XX
YX
XY
XX
XX
YX
XY
XX
XX
R
R
XY
XX
YX
YY
XX
YX
XX
XY
XX
R
XX
YX
XY
XX
YX
YY
XX
XY
XX
R
R
YY
YX
XX
XY
XX
R
YY
YX
XY
XX
XY
XX
XY
XX
YX
YY
YX
XX
)
(
0
0
.
4
]
[
where
)
(
0
0
.
3
0
0
.
2
0
0
0
0
.
1
1
1
1
1
1
1
1
1
1
1
]
[
1
1
1
1
1
1
2
1
1
2
1
1
1
2
1
1
Partitioned inverse (using the Gauss-Jordan method).](https://image.slidesharecdn.com/studymaterialforlecture1-240906184254-a6d76b4e/75/Study-material-for-matrix-and-determinant-pptx-8-2048.jpg)