This document contains formulas and definitions related to mathematics for Class 12. It covers topics such as relations and functions, inverse trigonometric functions, matrices, determinants, and continuity and differentiability. Some key points include definitions of relations like reflexive, symmetric, and transitive relations. It also provides formulas for inverse trigonometric functions and their properties. Matrices are defined including operations like transpose, addition, and multiplication. Determinants are defined for matrices of various orders.
![1. Relations and
Functions
◆
◆
◆
◆
◆
◆
◆
◆
◆
◆
◆
◆
◆
Empty relation is the relation R in X given by R = X × X.
Universal relation is the relation R in X given by R = X × X.
Reflexive relation R in X is a relation with (a, a) R a X.
Symmetric relation R in X is a relation satisfying (a, b) R implies (b, a) R.
Transitive relation R in X is a relation satisfying (a, b) R and (b, c) R
implies that (a, c) R.
Equivalence relation R in X is a relation which is reflexive, symmetric and
transitive.
Equivalence class [a] containing a X for an equivalence relation R in X is
the subset of X containing all elements b related toa.
A function f : X Y is one-one (or injective) if
f (x ) = f (x ) x = x x , x X.
1 2 1 2 1 2
A function f : X Y is onto (or surjective) if given any y Y, x X such
that f (x) = y.
A function f : X Y is one-one and onto (or bijective), if f is both one-one
and onto.
The composition of functions f : A B and g : B C is the function
gof : A C given by gof (x) = g(f (x)) x A.
A function f : X Y is invertible if g : Y X such that gof = IX and
fog = IY.
A function f : X Y is invertible if and only if f is one-one and onto.
◆ Given a finite set X, a function f : X X is one-one (respectively onto) if and only if f
is onto (respectively one-one). This is the characteristic property of a finite set. This
is not true for infinite set.
◆ A binary operation on a set A is a function from A × A to A.
◆ An element e X is the identity element for binary operation : X × X X, if a e
= a = e a a X.
◆ An element a X is invertible for binary operation : X × X X, if there exists b
X such that a b = e = b a where, e is the identity for the binary operation .
The element b is called inverse of a and is denoted by a–1.
◆ An operation on X is commutative if a b = b a a, b in X.
◆ An operation on X is associative if (a b) c = a (b c) a, b, c in X.](https://image.slidesharecdn.com/class12mathematicsformulae-copy-210330061007/85/CBSE-Class-12-Mathematics-formulas-2-320.jpg)
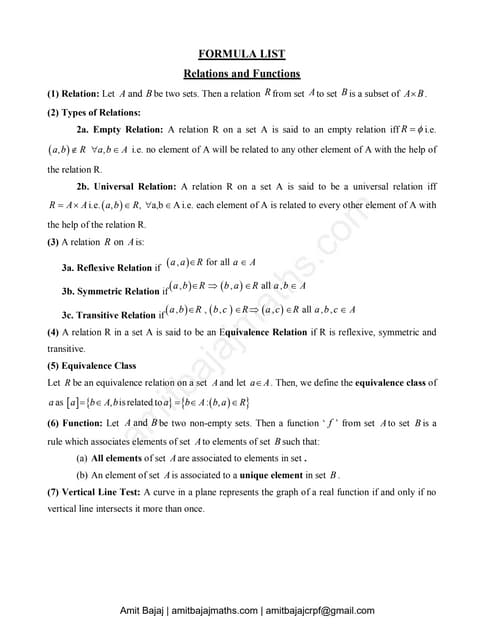
![2.INVERSE TRIGONOMETRIC
FUNCTIONS
◆ The domains and ranges (principal value branches) of inverse trigonometric
functionsare given in the followingtable:
Functions Domain Range
(Principal Value Branches)
y = sin–1 x [–1, 1]
2
,
2
y = cos–1 x [–1, 1] [0, ]
y = cosec–1 x R – (–1,1)
2
,
2
– {0}
y = sec–1 x R – (–1, 1)
[0, ] – { }
2
y = tan–1 x R
,
2 2
y = cot–1 x R (0, )
◆ sin–1x should not be confused with (sin x)–1. In fact (sin x)–1 =
1
sinx
and
similarlyforother trigonometricfunctions.
◆ The value of an inverse trigonometric functions which lies in its principal
value branch is called the principal value of that inverse trigonometric
functions.
For suitable values of domain, wehave
◆
◆
y = sin–1 x x = sin y
sin (sin–1 x) = x
◆
◆
x = sin y y = sin–1 x
sin–1 (sin x) = x
◆
1
sin–1 = cosec–1 x ◆ cos–1 (–x) = – cos–1 x
◆ cos–1
x
1
x
= sec–1
x ◆ cot–1
(–x) = – cot–1
x
◆
1
x
tan–1
= cot–1
x ◆ sec–1
(–x) = – sec–1
x](https://image.slidesharecdn.com/class12mathematicsformulae-copy-210330061007/85/CBSE-Class-12-Mathematics-formulas-3-320.jpg)

![◆ A matrix is an ordered rectangular array of numbers or functions.
◆ A matrix having m rows and n columns is called a matrix of order m × n.
◆ [aij]m × 1 is a column matrix.
◆ [aij]1 × n is a row matrix.
◆ An m × n matrix is a square matrix if m = n.
◆ A = [aij]m × m is a diagonal matrix if aij = 0, when i j.
3.Matrices
A = [aij]n × n is a scalar matrix if aij = 0, when i j, aij = k, (k is some
constant), when i = j.
A = [aij]n × n is an identity matrix, if aij = 1, when i = j, aij = 0, when i j. A
zero matrix has all its elements as zero.
A = [aij] = [bij] = B if (i) A and B are of same order, (ii) aij = bij for all
possible values of i and j.
kA = k[aij]m × n =[k(aij)]m × n
– A = (–1)A
A – B = A + (–1) B
A + B = B + A
(A + B) + C = A + (B + C), where A, B and C are of same order.
k(A + B) = kA + kB, where A and B are of same order, k is constant.
(k + l ) A = kA + lA, where k and l are constant.
◆
◆
◆
◆
◆
◆
◆
◆
◆
◆
◆
◆ If A = [aij]m× n and B = [bjk]n × p , thenAB = C = [cik]m × p, where cik ∑ aij bjk
j1
(i) A(BC) = (AB)C, (ii) A(B + C) = AB + AC, (iii) (A + B)C = AC + BC
◆
◆
◆
◆
◆
◆
If A = [a ] , then A
or AT = [a ]
ij m × n ji n × m
(i) (
A
)
= A, (ii) (kA)= kA
,(iii) (A + B
)
= A
+ B
, (iv) (AB)= B
A
A is a symmetric
matrix if A
=A.
A is a skew symmetric matrix if A
= – A.
Any square matrix can be represented as the sum of a symmetric and a
skew symmetric matrix.
Elementary operations of a matrix are asfollows:
(i) Ri
Rj
or Ci
Cj
(ii) Ri kRi or Ci kCi
(iii) Ri Ri + kRj or Ci Ci + kCj
If A and B are two square matrices such that AB = BA = I, then B is the
inverse matrix of A and is denoted by A–1 and A is the inverse ofB.
Inverse of a square matrix, if it exists, is unique.
◆
◆
◆](https://image.slidesharecdn.com/class12mathematicsformulae-copy-210330061007/85/CBSE-Class-12-Mathematics-formulas-5-320.jpg)
![4.Determinants
◆ Determinant of a matrix A = [a11]1× 1 is given by | a11| = a11
a a
◆ Determinant of a matrix A
a11
21 22
a12
is given by
21 22
a11 a12
A
a a
= a a – a a
11 22 12 21
◆ Determinantof a matrix A a2 2
a3
a1 b1 c1
b2
b3 c3
1
c is given by (expandingalongR )
2 2 2 2
3 3 3 3 3 3
b c a c a b
2 2 2 1
b c 1
a 1
a
3 3 3
c b
a b c
a1 b1 c1
A a b c a 2
b 2
c
For any square matrix A, the |A| satisfy following properties.
◆ |A|= |A|, where A
= transpose of A.
◆ If we interchange any two rows (or columns), then sign of determinant
changes.
◆ If any two rows or any two columns are identical or proportional, then value
of determinant iszero.
◆ If we multiplyeach elementof a row or a column of a determinantby constant
k, then value of determinant is multiplied by k.
◆ Multiplying a determinant by k means multiply elements of only one row
(or one column) by k.
◆If A [a ] , then k .A k3
A
◆
ij 33
◆ If elements of a row or a column in a determinant can be expressed as sum
of two or more elements, then the given determinant can be expressed as
sum of two or more determinants.
If to each element of a row or a column of a determinant the equimultiples of
corresponding elements of other rows or columns are added, then value of
determinant remains same.](https://image.slidesharecdn.com/class12mathematicsformulae-copy-210330061007/85/CBSE-Class-12-Mathematics-formulas-6-320.jpg)









![(iv)
x2
a2
dx
log x x2
a2
C (v)
a
a2
x2
dx
sin 1 x
C
(vi)
x2
a2
dx
log |x x2
a2
| C
Integration by parts
1
For given functions f and f , we have
2
, i.e., the
integral of the product of two functions = first function × integral of the
second function – integral of {differential coefficient of the first function ×
integral of the second function}. Care must be taken in choosing the first
function and the second function. Obviously, we must take that function as
the second function whose integral is well known to us.
ex
[ f (x) f
(x)] dx ex
f (x) dx C
Some special types of integrals
2 2 2 2 2 2
x a2
x a dx x a log x x a C
2 2
(i)
(ii)
2 2 2 2 2 2
x a2
x a dx x a log x x a C
2 2
(iii) 2 2 2 2
x a2
1 x
a x dx a x sin C
2 2 a
(iv) Integrals of the types
ax2
bx c ax2
bx c
dx
or
dx
can be
transformed into standard form by expressing
b c b 2
c b2
x
ax2
+ bx + c = a x2
a x
a a 2a a 4a2
px qdx
or
px q dx
ax bx c
(v) Integrals of the types 2
ax2
bx c
can be](https://image.slidesharecdn.com/class12mathematicsformulae-copy-210330061007/85/CBSE-Class-12-Mathematics-formulas-16-320.jpg)
![b
x
x
transformed into standard form byexpressing
px q A
d
(ax2
bx c) B A (2ax b) B , whereAand B are
dx
determined by comparing coefficients on both sides.
We have defined a
f (x) dx as the area of the region bounded by thecurve
y = f (x), a x b, the x-axis and the ordinates x = a and x = b. Let x be a
given point in [a, b]. Then a
f (x) dx represents the Area function A (x).
This concept of area functionleads to the FundamentalTheorems of Integral
Calculus.
First fundamental theorem of integral calculus
Let the area function be defined by A(x) = a
f (x) dx for all x a, where
the function f is assumed to be continuous on [a, b].ThenA
(x) = f (x) for all
x [a, b].
Second fundamental theorem of integral calculus
Let f be a continuous function of x defined on the closed interval [a, b] and
dx
d
let F be another functionsuch that F(x) f (x) for all x in the domain of
b b
a
a
f, then f (x) dx F(x) C F (b) F (a) .
This is called the definite integral of f over the range [a, b], where a and b
are called the limits of integration, a being the lower limit and b the
upperlimit.](https://image.slidesharecdn.com/class12mathematicsformulae-copy-210330061007/85/CBSE-Class-12-Mathematics-formulas-17-320.jpg)
![8.Application of Integrals
b b
d d
The area of the region bounded by the curve y = f (x), x-axis and the lines
x = a and x = b (b > a) is given by the formula: Area a
ydx a
f (x)dx .
The area of the region bounded by the curve x = (y), y-axis and the lines
y = c, y = d is given by the formula: Area c
xdy c
(y)dy .
The area of the region enclosed between two curves y = f (x), y = g (x) and
the lines x = a, x = b is given by theformula,
b
a
Area f (x) g(x) dx , where, f(x) g (x) in [a, b]
If f (x) g (x) in [a, c] and f (x) g (x) in [c, b], a < c < b, then
c b
a c
Area f (x) g(x) dx g(
x) f (x)dx.](https://image.slidesharecdn.com/class12mathematicsformulae-copy-210330061007/85/CBSE-Class-12-Mathematics-formulas-18-320.jpg)






![Let X be a random variable whose possible values x , x , x , ..., x occur with
1 2 3 n
1 2 3 n
probabilities p , p , p , ... p respectively. The mean of X, denoted by , is
n
the number xi pi .
i1
The mean of a randomvariableX is alsocalledtheexpectationof X, denoted
by E (X).
Let X be a random variable whose possible values x1, x2, ..., xn occur with
1 2 n
probabilities p(x ), p(x ), ..., p(x ) respectively.
Let = E(X) be the mean of X. The variance of X, denoted by Var (X) or
x
2
, is defined as
2
or equivalently = E (X –) 2
x
The non-negativenumber
is called the standard deviation of the random variable X.
Var (X) = E (X2) – [E(X)]2
Trials of a random experiment are called Bernoulli trials, if they satisfy the
following conditions:
(i) There should be a finite number of trials.
(ii) The trials should be independent.
(iii) Each trial has exactly two outcomes : success or failure.
(iv) The probability of success remains the same in eachtrial.
For Binomial distribution B (n, p), P (X = x) = nC q n–x px, x = 0, 1,..., n
x
(q = 1 – p)](https://image.slidesharecdn.com/class12mathematicsformulae-copy-210330061007/85/CBSE-Class-12-Mathematics-formulas-25-320.jpg)




![Inverse trigonometric functions xii[1]](https://cdn.slidesharecdn.com/ss_thumbnails/inversetrigonometricfunctionsxii1-110816104305-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)















![Class 12th PHE Practical - 1 [SAI Khelo India Physical Fitness Test]](https://cdn.slidesharecdn.com/ss_thumbnails/adobescandec312023-231231105348-091edff7-thumbnail.jpg?width=640&height=640&fit=bounds)



















































