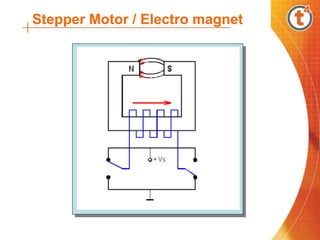
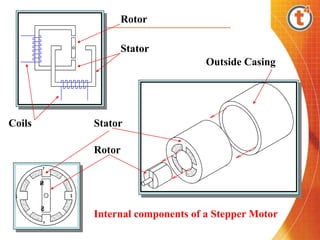
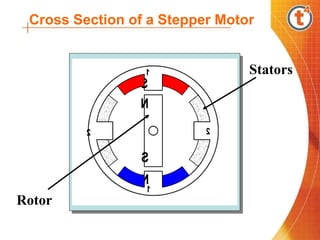
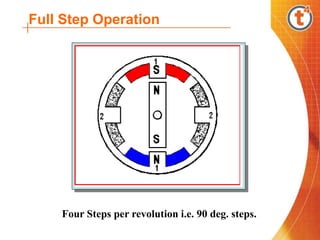
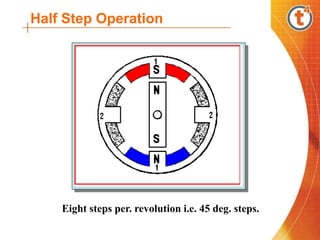
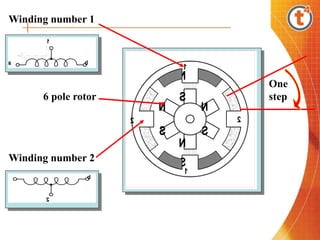
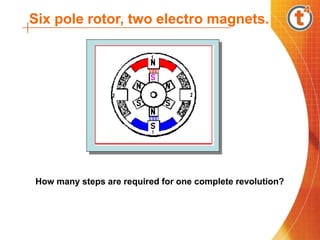
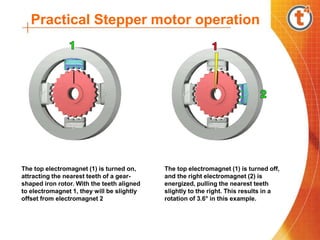
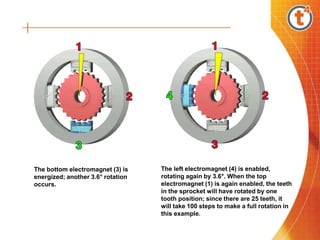
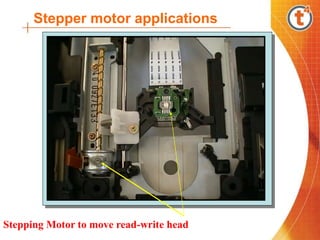
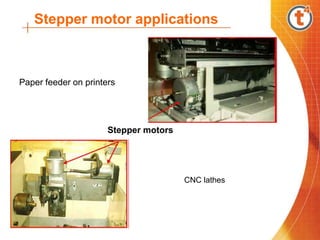
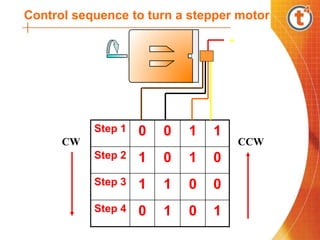
Stepper motors work by having an internal rotor magnetically pulled by external stator electromagnets, causing it to rotate in discrete steps. They are useful for applications requiring precise positioning control, such as printers, CNC machines, and hard disk drives. Stepper motors have advantages like low cost and simplicity but require more current than DC motors and can only operate in open loop systems without feedback.