SUGAR SWEET ROBOTICSCO., LTD.
編集
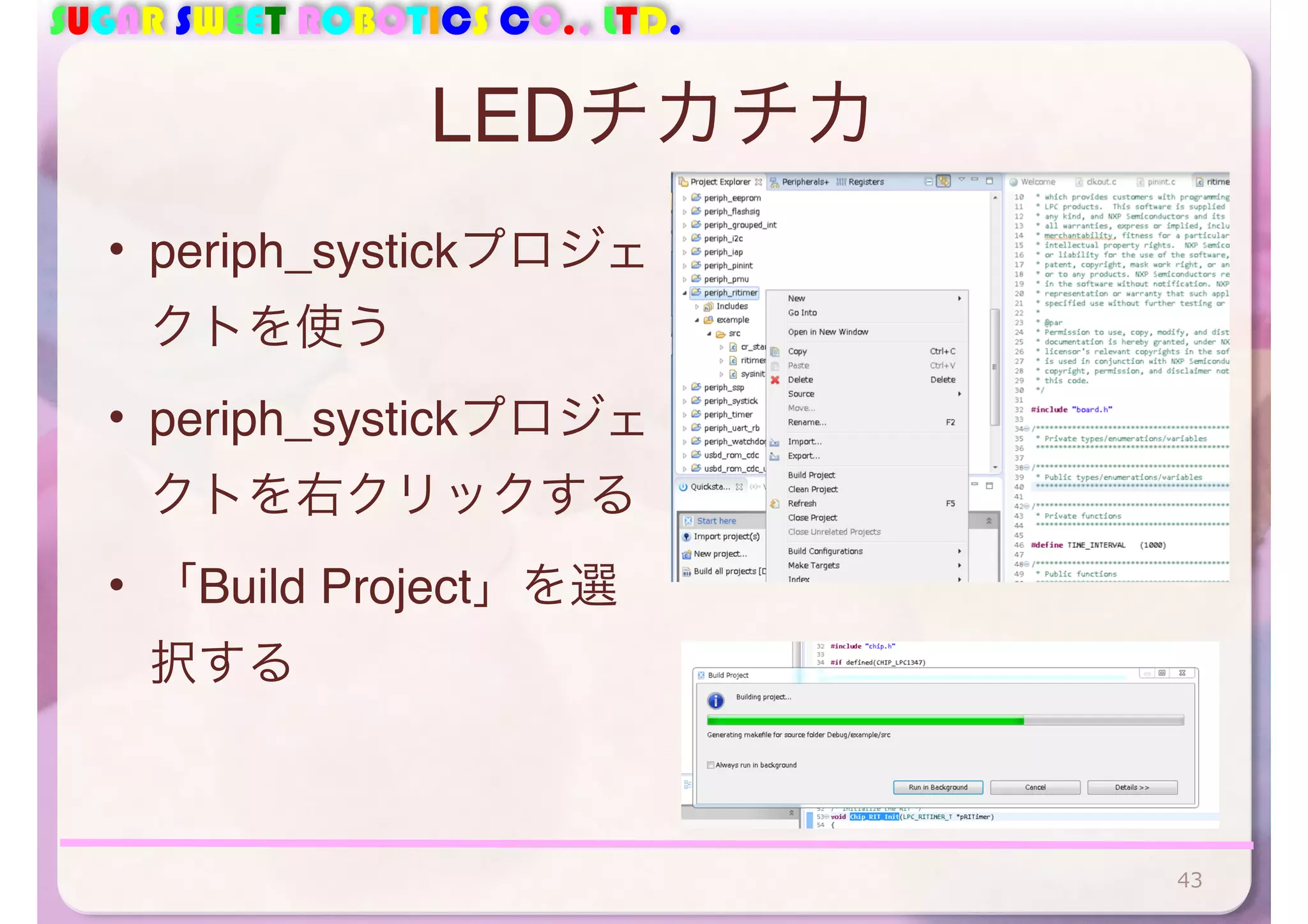
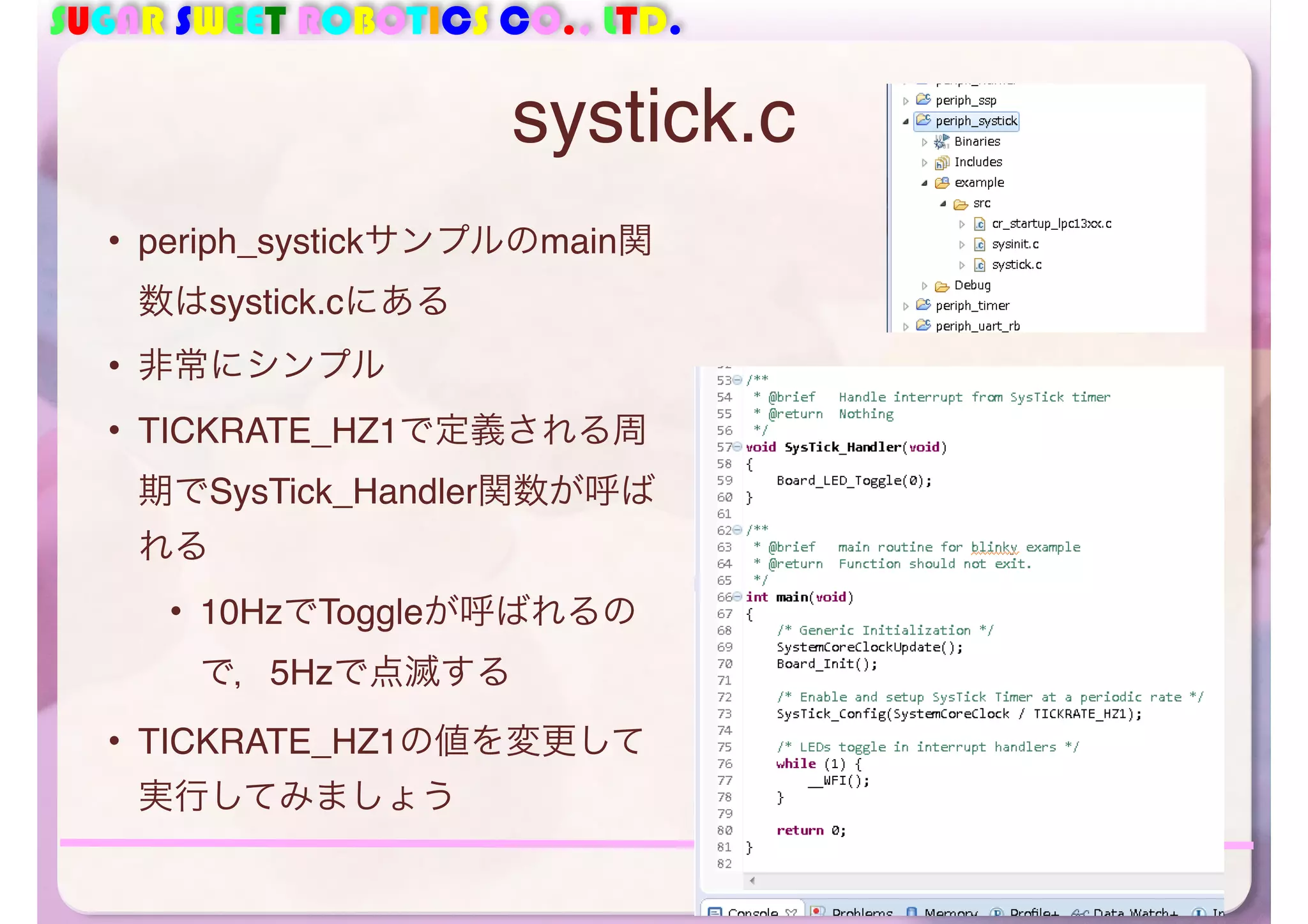
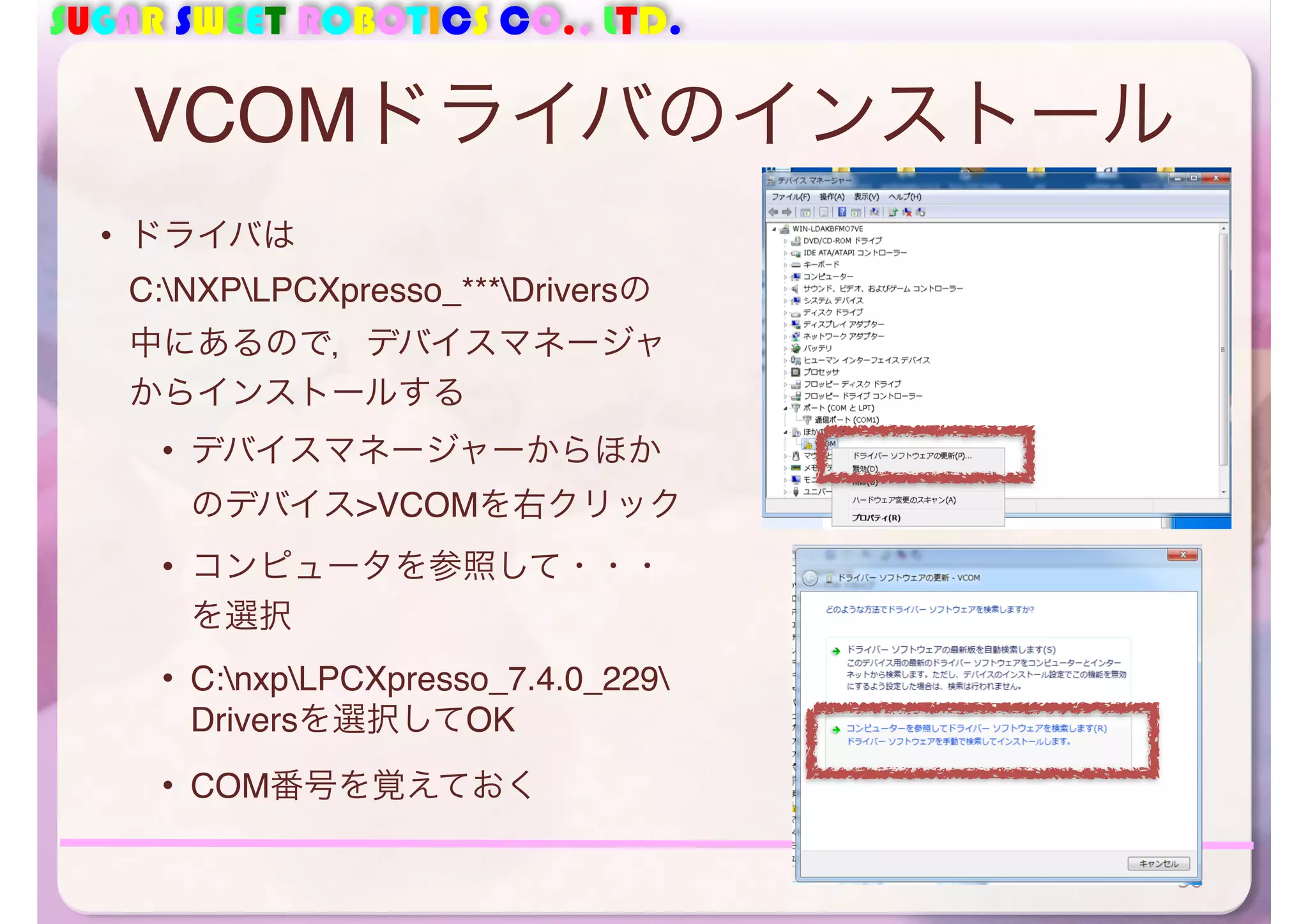
• 下の部分を編集する (178行目付近)
64
while
(1)
{
/*
Check
if
host
has
connected
and
opened
the
VCOM
port
*/
if
((vcom_connected()
!=
0)
&&
(prompt
==
0))
{
vcom_write("Hello
World!!rn",
15);
prompt
=
1;
}
/*
If
VCOM
port
is
opened
echo
whatever
we
receive
back
to
host.
*/
if
(prompt)
{
rdCnt
=
vcom_bread(&g_rxBuff[0],
256);
if
(rdCnt)
{
vcom_write(&g_rxBuff[0],
rdCnt);
}
}
/*
Sleep
until
next
IRQ
happens
*/
__WFI();
}
この部分は,接続が確認
された場合にHello
World
と送信する命令






![SUGAR SWEET ROBOTICS CO., LTD.
編集
• 下の部分を編集する (178行目付近)
64
while
(1)
{
/*
Check
if
host
has
connected
and
opened
the
VCOM
port
*/
if
((vcom_connected()
!=
0)
&&
(prompt
==
0))
{
vcom_write("Hello
World!!rn",
15);
prompt
=
1;
}
/*
If
VCOM
port
is
opened
echo
whatever
we
receive
back
to
host.
*/
if
(prompt)
{
rdCnt
=
vcom_bread(&g_rxBuff[0],
256);
if
(rdCnt)
{
vcom_write(&g_rxBuff[0],
rdCnt);
}
}
/*
Sleep
until
next
IRQ
happens
*/
__WFI();
}
この部分は,接続が確認
された場合にHello
World
と送信する命令](https://image.slidesharecdn.com/random-141114013251-conversion-gate02/75/slide-64-2048.jpg)

![SUGAR SWEET ROBOTICS CO., LTD.
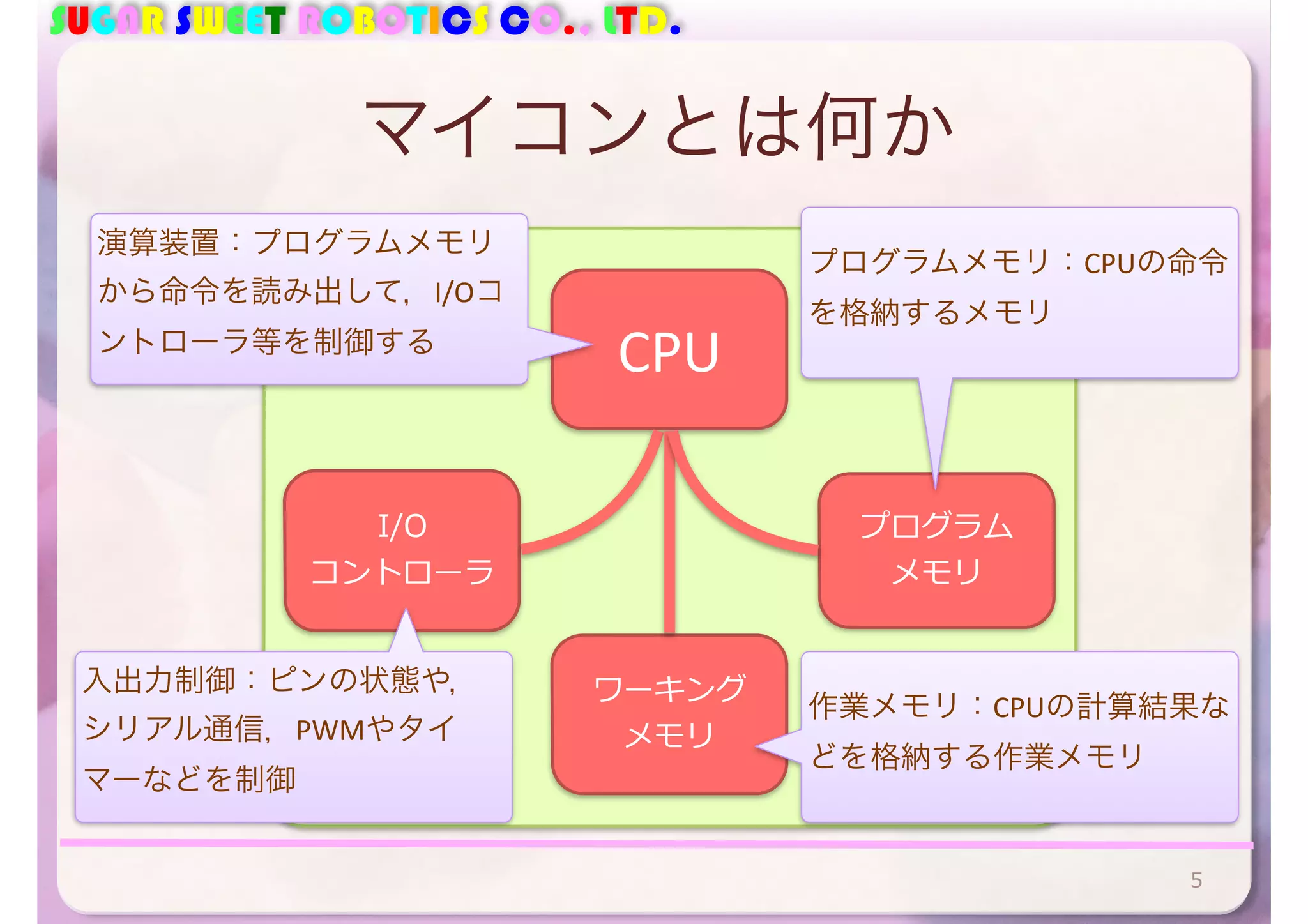
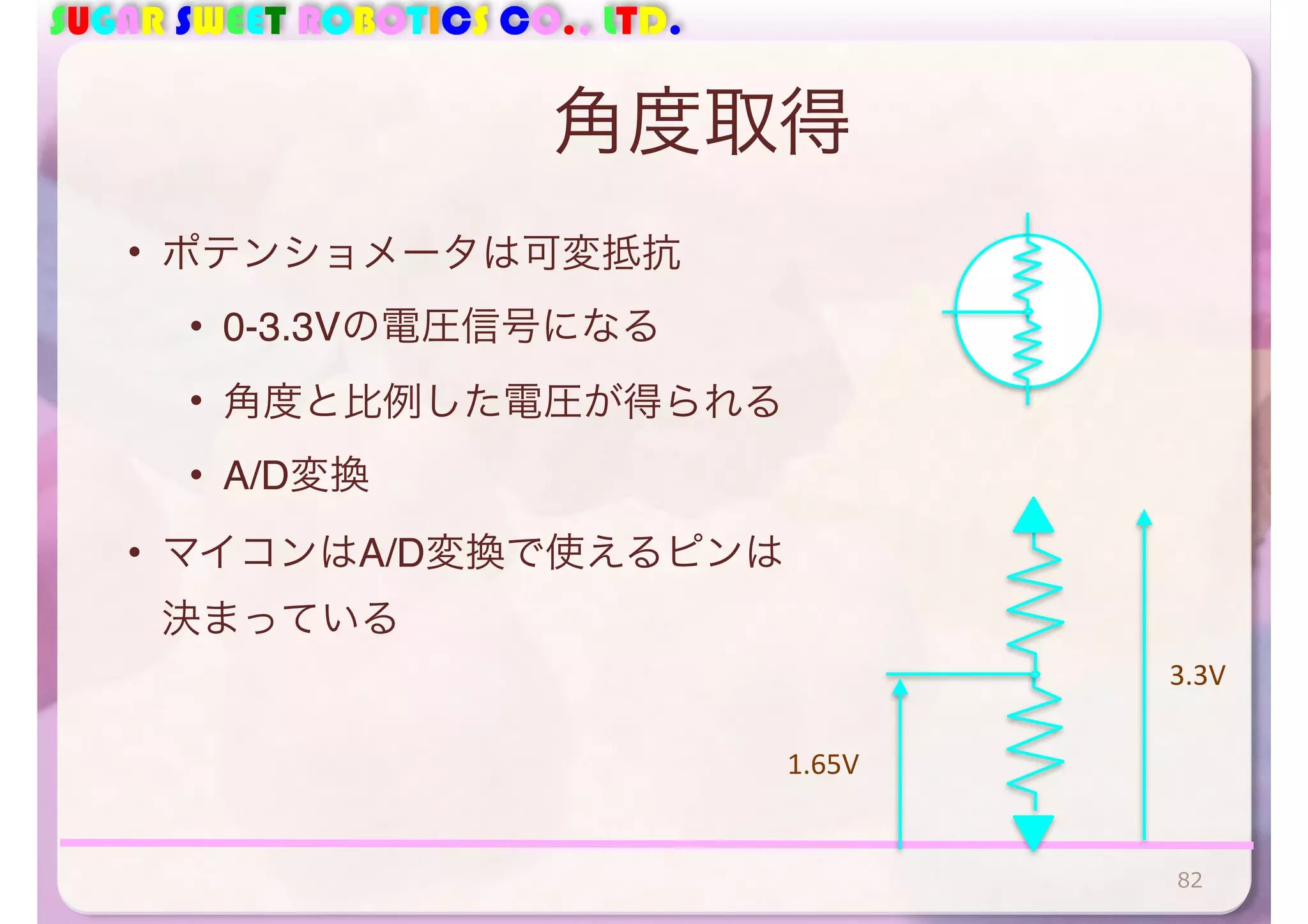
A/D変換
• アナログ信号をデジタルデータに変換
• LPC1347には分解能12bitが搭載
• [0, 3.3V] を [0, 4095]のデータに
• 変換には数マイクロ秒かかる
• 変換終了までCPUが待たないといけない
• 変換終了時に割り込みをかけることもできる
• periph_adcプロジェクトを参照
73](https://image.slidesharecdn.com/random-141114013251-conversion-gate02/75/slide-73-2048.jpg)
![SUGAR SWEET ROBOTICS CO., LTD.
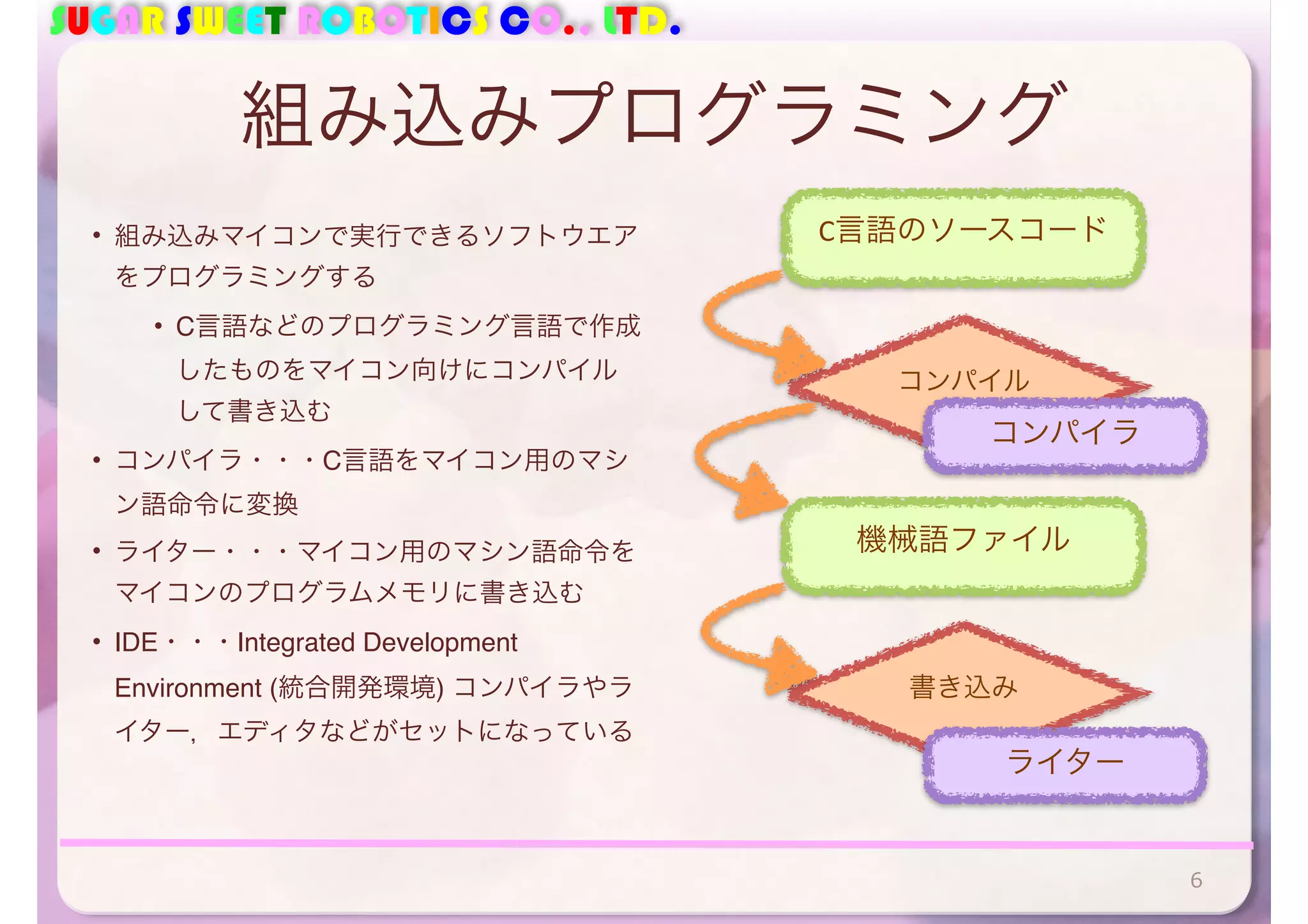
モータを回す
• マイコンには数[A]という大きな電流を流す機能は
ない
• トランジスタを使う
• 正逆回転させるためには複数のトランジスタが必要
• モータ駆動用のICがある
• 今回はDCモータの正逆回転が可能なTA8428を使う
• マイコンからは2つのデジタル出力で制御
• [1,0]で正回転,[0, 1]で逆回転
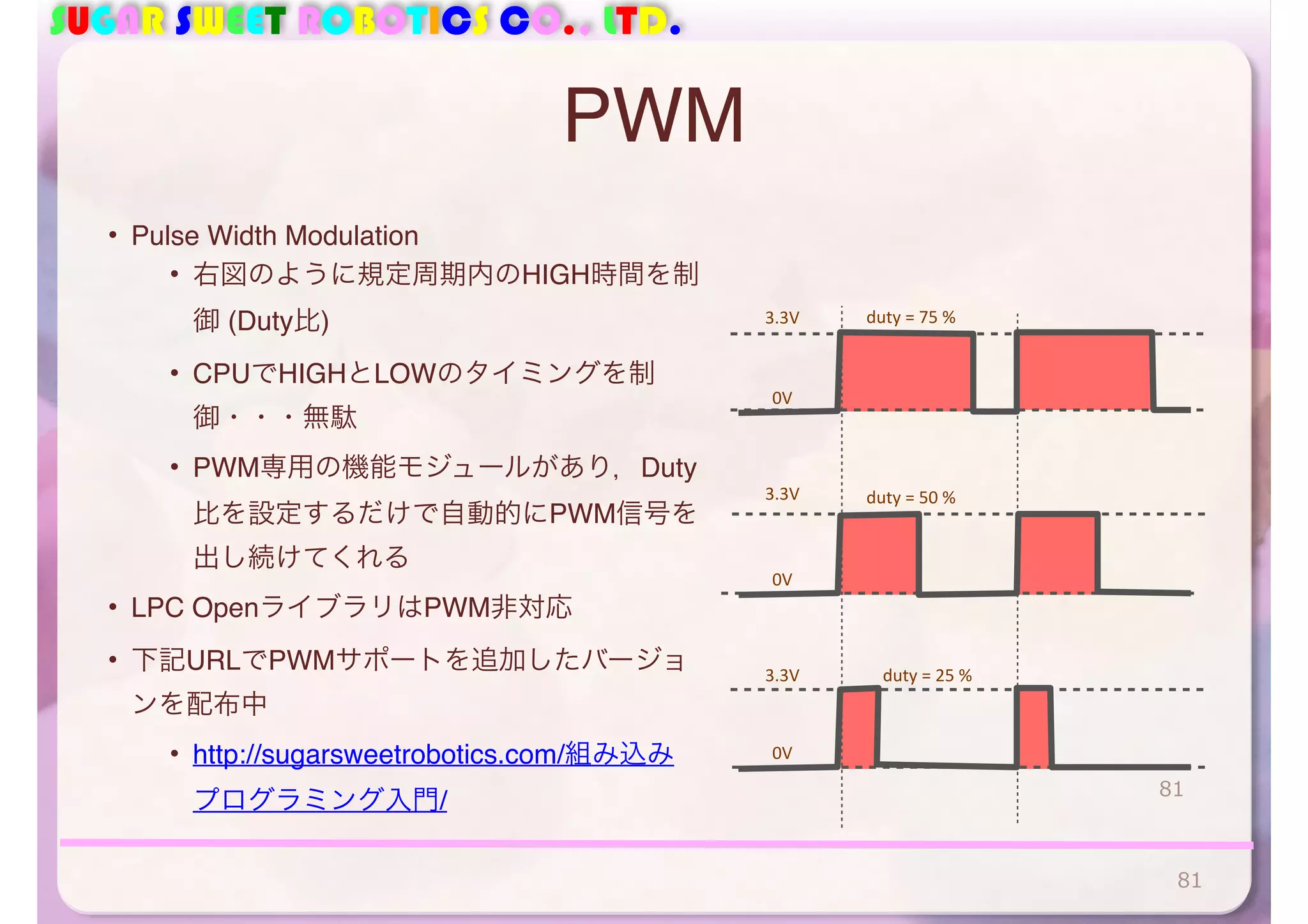
• 回転数の調節にはPWMを使う
• パルス幅を指定すると自動的に出力
• パルス幅が広ければ回転数が高くなる](https://image.slidesharecdn.com/random-141114013251-conversion-gate02/75/slide-80-2048.jpg)
























![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)