Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Yuki Suga
PPTX, PDF
1,387 views
RTミドルウエアコンテスト2011応募作品「RTno」
arduinoマイコンボードを使って,RTミドルウエア対応コンポーネントを簡単に作るためのライブラリとツールです.
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 14
2
/ 14
3
/ 14
4
/ 14
5
/ 14
6
/ 14
7
/ 14
8
/ 14
9
/ 14
10
/ 14
11
/ 14
12
/ 14
13
/ 14
14
/ 14
More Related Content
PPTX
FPGAって、何?
by
Toyohiko Komatsu
PDF
Gpu vs fpga
by
Yukitaka Takemura
PPT
FPGA
by
firewood
PPT
20140310 fpgax
by
funadasatoshi
PPTX
FPGAことはじめ
by
Takahiro Nakayama
PDF
ソフトウェア技術者はFPGAをどのように使うか
by
なおき きしだ
PDF
増え続ける情報に対応するためのFPGA基礎知識
by
なおき きしだ
PPTX
Myoshimi extreme
by
Masato Yoshimi
FPGAって、何?
by
Toyohiko Komatsu
Gpu vs fpga
by
Yukitaka Takemura
FPGA
by
firewood
20140310 fpgax
by
funadasatoshi
FPGAことはじめ
by
Takahiro Nakayama
ソフトウェア技術者はFPGAをどのように使うか
by
なおき きしだ
増え続ける情報に対応するためのFPGA基礎知識
by
なおき きしだ
Myoshimi extreme
by
Masato Yoshimi
Similar to RTミドルウエアコンテスト2011応募作品「RTno」
PDF
20130329 rtm1
by
openrtm
PDF
ROBOMECH2023 RTミドルウェア講習会 第1部
by
openrtm
KEY
DE0でラジコンカー作ってみた 関西de0 fpga勉強会20120519
by
Yasuhiro Ishii
PDF
Platform io で シュッと arduino 開発を高速化しよう speed up your arduino development with p...
by
74th
PDF
ものづくりプロジェクトII 一日でわかるArduino入門
by
Yoichi Yamazaki
PDF
IoTハンズオン勉強会 「センサーデータをクラウドに蓄積してみよう」
by
Yasuyuki Sugai
PPTX
平成26年度熊本高専Arduino講座 第2週 XBeeを用いた遠隔放射線量計測
by
Katsuhiro Morishita
ODP
【入門】Arduino勉強会
by
Masashi_Brilliant
PDF
2016 summercamp 当研究室でのRTミドルウエアの取り組み
by
openrtm
PDF
130522 01
by
openrtm
PDF
130711 01
by
openrtm
PDF
Nedo講座・rtmセミナー
by
openrtm
PDF
Pirtunit slideshare
by
openrtm
PPT
170622 02
by
openrtm
PDF
20130329 rtm01
by
openrtm
PPT
130329 01
by
openrtm
PPTX
2015/05/23 シニア技術者プログラム第3弾 「第二回IoT勉強会&交流会」 15:00~15:20 Arduinoで簡単回路作成実演
by
aitc_jp
PDF
200527 ur
by
NoriakiAndo
PDF
2017年01月21日 AITCシニア技術者勉強会 第3回「各種センサーを使ってみよう!~温湿度と加速度~」
by
aitc_jp
PDF
Japanino Workshop #3
by
Shigeru Kobayashi
20130329 rtm1
by
openrtm
ROBOMECH2023 RTミドルウェア講習会 第1部
by
openrtm
DE0でラジコンカー作ってみた 関西de0 fpga勉強会20120519
by
Yasuhiro Ishii
Platform io で シュッと arduino 開発を高速化しよう speed up your arduino development with p...
by
74th
ものづくりプロジェクトII 一日でわかるArduino入門
by
Yoichi Yamazaki
IoTハンズオン勉強会 「センサーデータをクラウドに蓄積してみよう」
by
Yasuyuki Sugai
平成26年度熊本高専Arduino講座 第2週 XBeeを用いた遠隔放射線量計測
by
Katsuhiro Morishita
【入門】Arduino勉強会
by
Masashi_Brilliant
2016 summercamp 当研究室でのRTミドルウエアの取り組み
by
openrtm
130522 01
by
openrtm
130711 01
by
openrtm
Nedo講座・rtmセミナー
by
openrtm
Pirtunit slideshare
by
openrtm
170622 02
by
openrtm
20130329 rtm01
by
openrtm
130329 01
by
openrtm
2015/05/23 シニア技術者プログラム第3弾 「第二回IoT勉強会&交流会」 15:00~15:20 Arduinoで簡単回路作成実演
by
aitc_jp
200527 ur
by
NoriakiAndo
2017年01月21日 AITCシニア技術者勉強会 第3回「各種センサーを使ってみよう!~温湿度と加速度~」
by
aitc_jp
Japanino Workshop #3
by
Shigeru Kobayashi
More from Yuki Suga
PDF
OpenRTM-aist入門
by
Yuki Suga
PDF
ネットワーク通信入門
by
Yuki Suga
PDF
組み込み入門
by
Yuki Suga
PDF
機械図面の基礎
by
Yuki Suga
PDF
ロボットについて (ロボットのソフトウェア的側面と分散モジュール開発)
by
Yuki Suga
PDF
Wasanbonの開発
by
Yuki Suga
PDF
RTミドルウエア講習会2015
by
Yuki Suga
PPTX
Robotech2012講習会v01最終版v2
by
Yuki Suga
PPT
RTミドルウエア活用について
by
Yuki Suga
PDF
SI2008 RT-middleware Contest
by
Yuki Suga
PDF
組み込み入門
by
Yuki Suga
PDF
RTC-scilab
by
Yuki Suga
PDF
適応アルゴリズムとコミュニケーションロボット
by
Yuki Suga
OpenRTM-aist入門
by
Yuki Suga
ネットワーク通信入門
by
Yuki Suga
組み込み入門
by
Yuki Suga
機械図面の基礎
by
Yuki Suga
ロボットについて (ロボットのソフトウェア的側面と分散モジュール開発)
by
Yuki Suga
Wasanbonの開発
by
Yuki Suga
RTミドルウエア講習会2015
by
Yuki Suga
Robotech2012講習会v01最終版v2
by
Yuki Suga
RTミドルウエア活用について
by
Yuki Suga
SI2008 RT-middleware Contest
by
Yuki Suga
組み込み入門
by
Yuki Suga
RTC-scilab
by
Yuki Suga
適応アルゴリズムとコミュニケーションロボット
by
Yuki Suga
Recently uploaded
PDF
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
by
NorihiroSunada
PDF
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
by
Masaki Yamakawa
PPTX
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
by
Kiyohide Yamaguchi
PDF
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
by
Evolve LLC.
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
by
Tasuku Takahashi
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
by
Tasuku Takahashi
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
by
NorihiroSunada
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
by
Masaki Yamakawa
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
by
Kiyohide Yamaguchi
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
by
Evolve LLC.
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
by
Tasuku Takahashi
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
by
Tasuku Takahashi
RTミドルウエアコンテスト2011応募作品「RTno」
1.
RTコンポーネント対応デバイスを 開発するためのマイコン用 ライブラリ&ツール「RTno」の開発
株式会社リバスト 菅 佑樹
2.
RTno?
3.
RTno = arduino
+ RT-middleware
4.
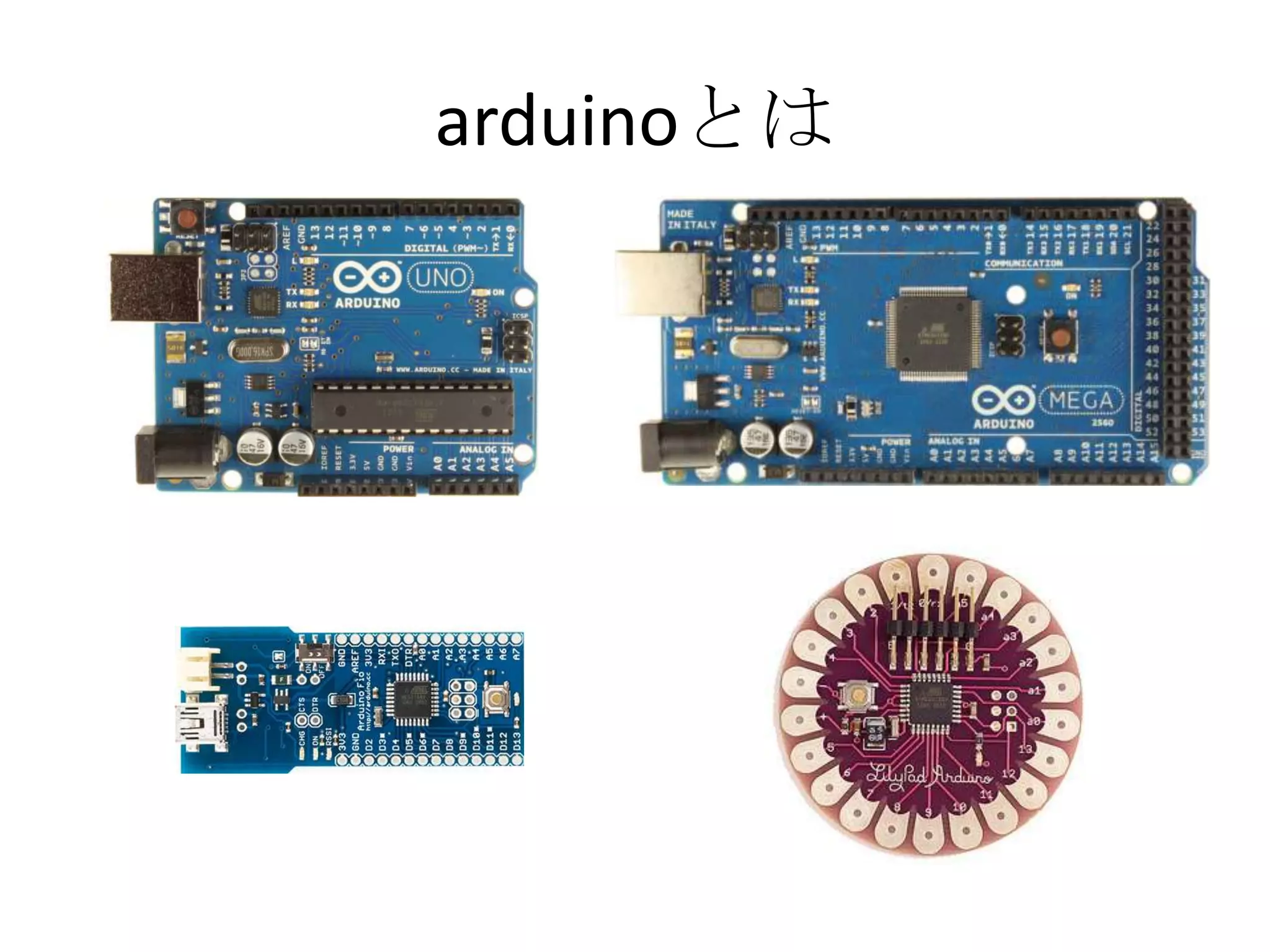
arduinoとは
5.
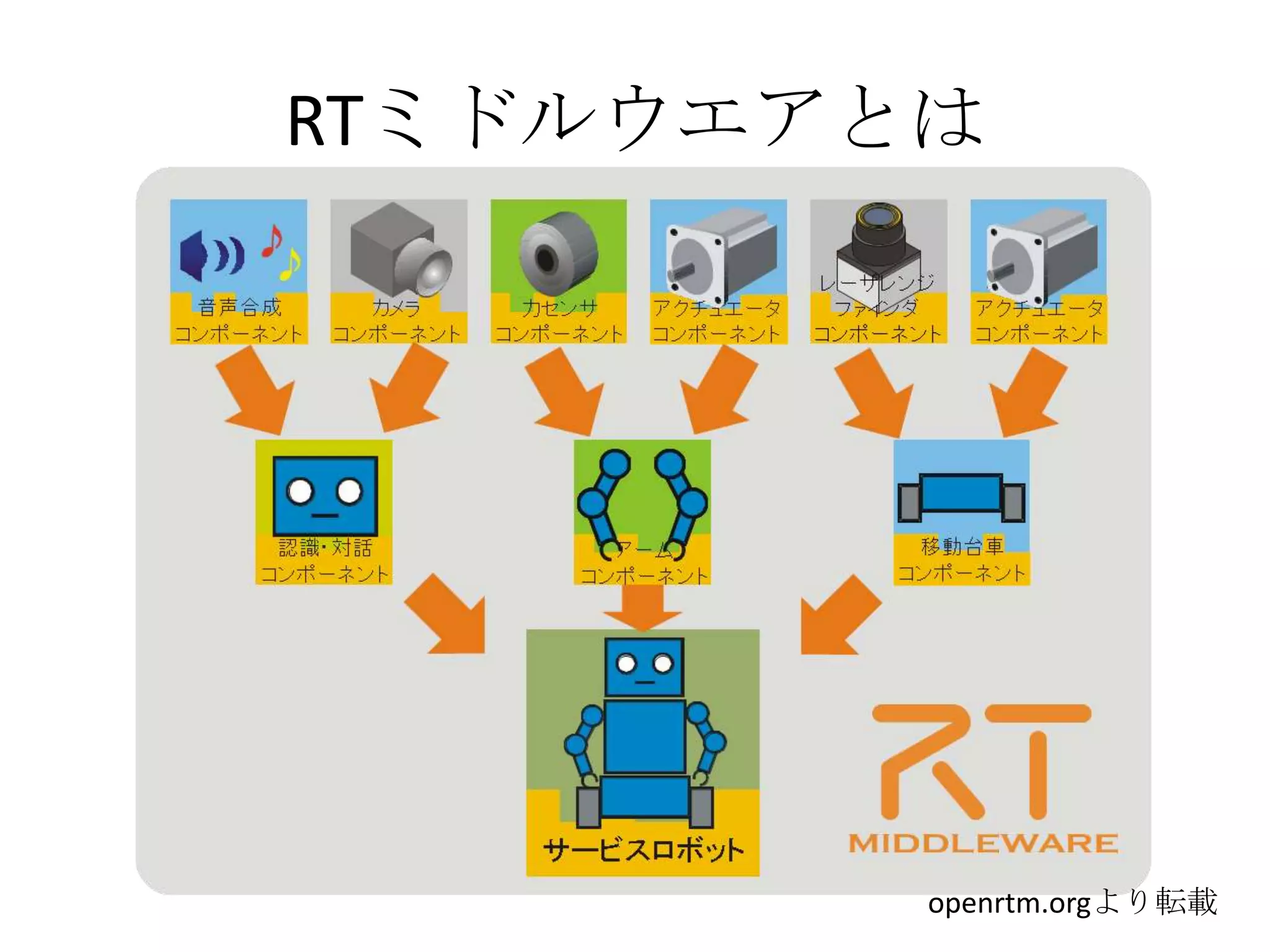
RTミドルウエアとは
openrtm.orgより転載
6.
RTnoの目的 • OpenRTM-aist対応デバイスを簡単に作る • ウケを取る
7.
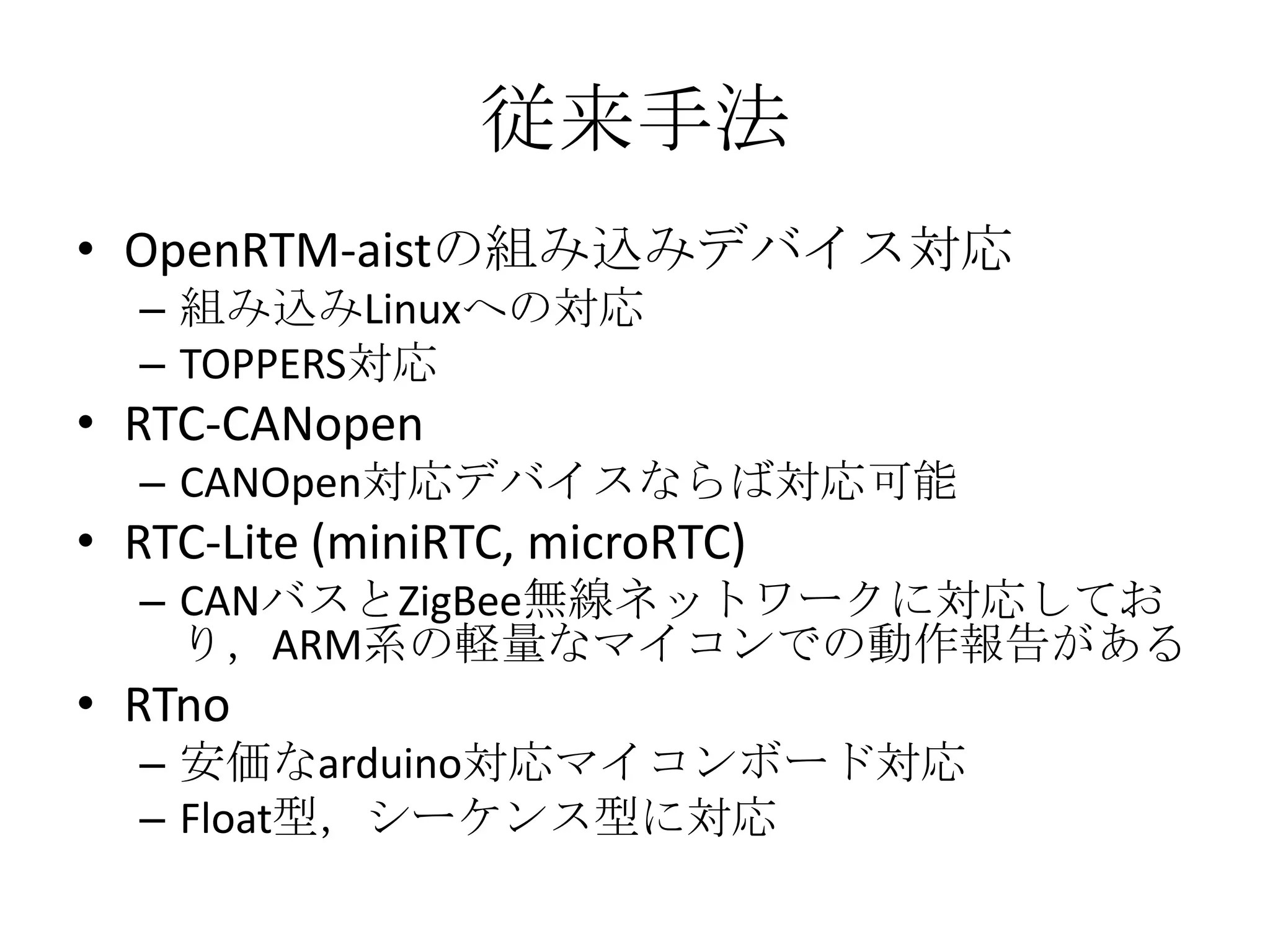
従来手法 • OpenRTM-aistの組み込みデバイス対応
– 組み込みLinuxへの対応 – TOPPERS対応 • RTC-CANopen – CANOpen対応デバイスならば対応可能 • RTC-Lite (miniRTC, microRTC) – CANバスとZigBee無線ネットワークに対応してお り,ARM系の軽量なマイコンでの動作報告がある • RTno – 安価なarduino対応マイコンボード対応 – Float型,シーケンス型に対応
8.
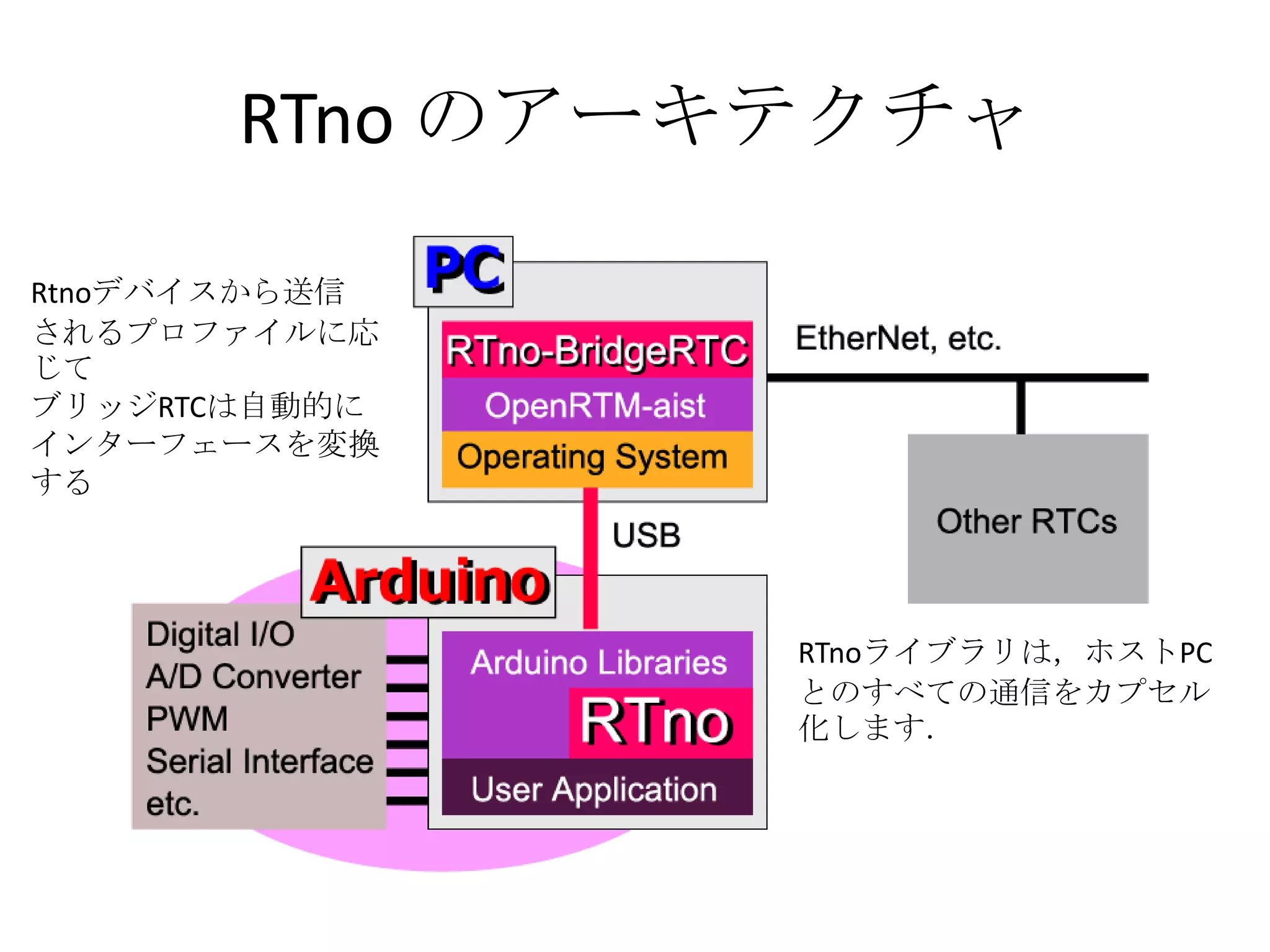
RTno のアーキテクチャ Rtnoデバイスから送信 されるプロファイルに応 じて ブリッジRTCは自動的に インターフェースを変換 する
RTnoライブラリは,ホストPC とのすべての通信をカプセル 化します.
9.
RTnoを使ったRTC対応デバイス開発 • rtcconf関数でセッティングを行う –
シリアルポートの選択,設定 – 実行コンテキスト(タイマもしくはブリッジ 同期) #include <RTno.h> void rtcconf(void) { conf._default.connection_type = ConnectionTypeSerial1; conf._default.baudrate = 57600; exec_cxt.periodic.type = Timer1ExecutionContext; exec_cxt.periodic.rate = 1000; // [Hz] }
10.
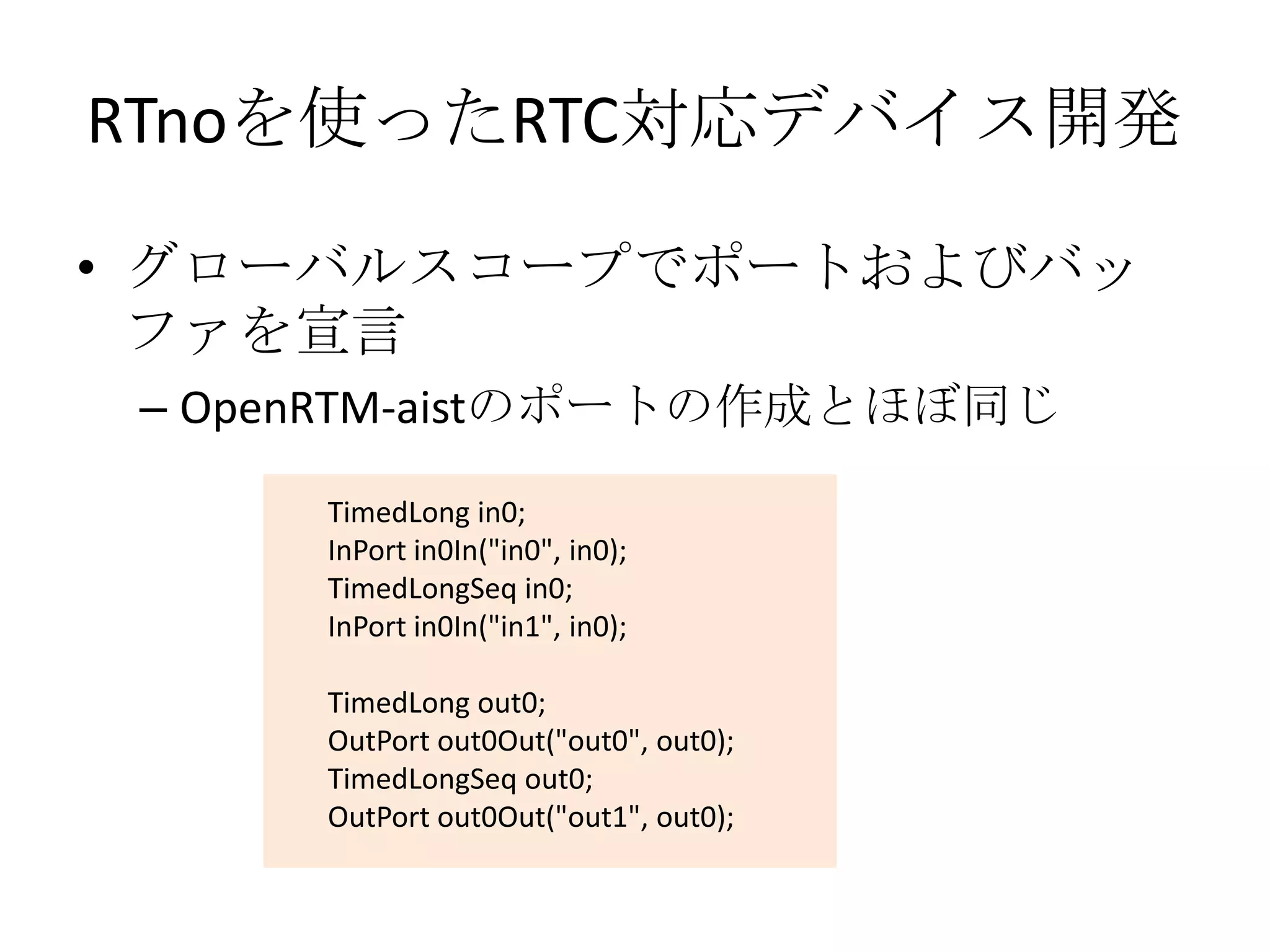
RTnoを使ったRTC対応デバイス開発 • グローバルスコープでポートおよびバッ
ファを宣言 – OpenRTM-aistのポートの作成とほぼ同じ TimedLong in0; InPort in0In("in0", in0); TimedLongSeq in0; InPort in0In("in1", in0); TimedLong out0; OutPort out0Out("out0", out0); TimedLongSeq out0; OutPort out0Out("out1", out0);
11.
RTnoを使ったRTC対応デバイス開発 • onInitializeで初期化
– 起動直後に呼ばれる. int RTno::onInitialize() { addInPort(in0In); addInPort(in1In); addOutPort(out0Out); addOutPort(out1Out); int LED = 13; pinMode(LED, OUTPUT); return RTC_OK; }
12.
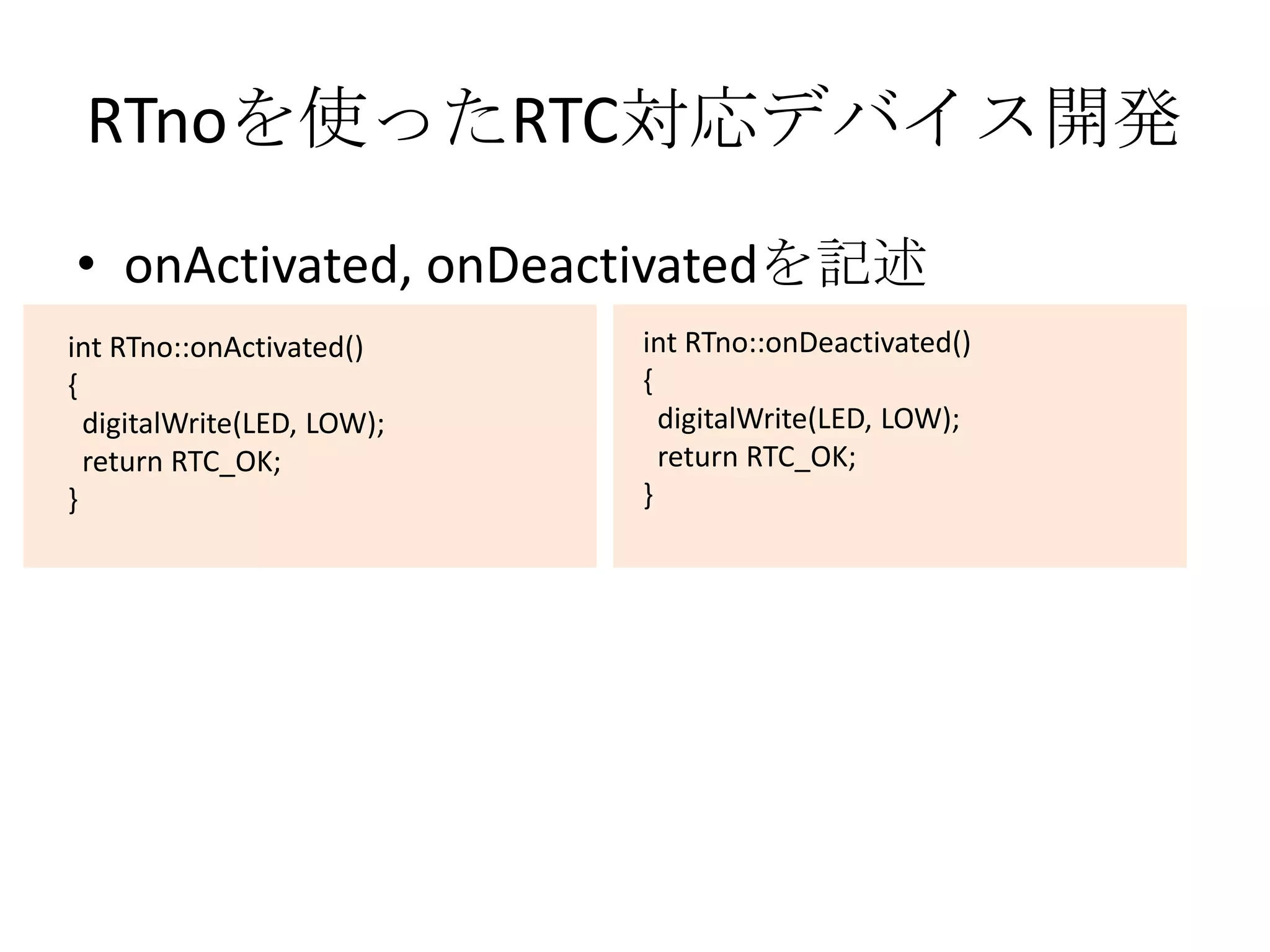
RTnoを使ったRTC対応デバイス開発 • onActivated, onDeactivatedを記述 int
RTno::onActivated() int RTno::onDeactivated() { { digitalWrite(LED, LOW); digitalWrite(LED, LOW); return RTC_OK; return RTC_OK; } }
13.
RTnoを使ったRTC対応デバイス開発 • onExecute内で,データの授受を行う int RTno::onExecute()
{ out0.data = 3.14159; if(in0In.isNew()) { out0Out.write(); in0In.read(); long data = in0.data; out0.data.length(3); digitalWrite(LED, data); out0.data[0] = 1.1; } out0.data[1] = 2.2; out0.data[2] = 3.3; if(in0In.isNew(&in1In)) { out0Out.write(); in0In.read(); for(int i = 0;i < in0.data.length;i++) { return RTC_OK; long data_buffer = in0.data[i]; } } }
14.
まとめ • 早い・安い・巧いRTCを提供 –
学習用に • マイコンがわかる人のRTMへの切り口 • RTMがわかる人のマイコンへの切り口 – ロボットにシンプルなI/Oを追加 • 今後の展望 – EtherNetシールドに対応 – デバイスVSデバイス通信に対応 – 他のマイコンに移植
Download
![RTnoを使ったRTC対応デバイス開発
• rtcconf関数でセッティングを行う
– シリアルポートの選択,設定
– 実行コンテキスト(タイマもしくはブリッジ
同期)
#include <RTno.h>
void rtcconf(void) {
conf._default.connection_type = ConnectionTypeSerial1;
conf._default.baudrate = 57600;
exec_cxt.periodic.type = Timer1ExecutionContext;
exec_cxt.periodic.rate = 1000; // [Hz]
}](https://image.slidesharecdn.com/presentation-111221221205-phpapp01/75/RT-2011-RTno-9-2048.jpg)

![RTnoを使ったRTC対応デバイス開発
• onExecute内で,データの授受を行う
int RTno::onExecute() { out0.data = 3.14159;
if(in0In.isNew()) { out0Out.write();
in0In.read();
long data = in0.data; out0.data.length(3);
digitalWrite(LED, data); out0.data[0] = 1.1;
} out0.data[1] = 2.2;
out0.data[2] = 3.3;
if(in0In.isNew(&in1In)) { out0Out.write();
in0In.read();
for(int i = 0;i < in0.data.length;i++) { return RTC_OK;
long data_buffer = in0.data[i]; }
}
}](https://image.slidesharecdn.com/presentation-111221221205-phpapp01/75/RT-2011-RTno-13-2048.jpg)