Downloaded 16 times



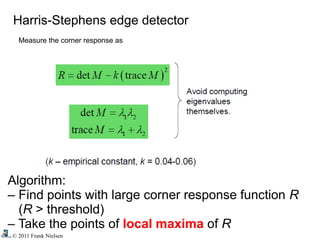









































The document discusses key concepts in 3D transformations and computer graphics, including edge detection using Harris-Stephens algorithm, quaternions for rotations, and the Iterative Closest Point (ICP) algorithm for aligning point sets. It highlights techniques like bilateral filtering and the challenges of nearest neighbor computations in high dimensions. Additionally, it covers the mathematical foundations behind projective geometry, including duality and intersection of lines.






















































![11.[23 36]quadrature radon transform for smoother tomographic reconstruction](https://cdn.slidesharecdn.com/ss_thumbnails/11-23-36quadratureradontransformforsmoothertomographicreconstruction-120512235621-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



























