Download to read offline


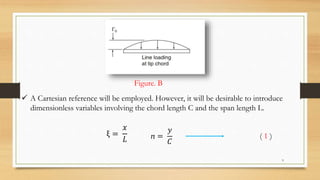
![ For the loading, may say that
q = −
4Γ0
𝐶2 (𝑦2 − 𝐶𝑦)[δ(𝑥 − 0)]
Dimensionless variables we have
q = −4Γ0 (ⴖ2
− ⴖ)[δ(ξ − 0)] ( 4 )
Now we employ Eqs.(3) and (4) to give the total potential energy as follows:
Π =
𝐿𝐶𝐷
2 0
1
𝑑ξ
𝑛𝛽
𝐿
𝐶
ξ𝑡𝑎
1+
𝐿
𝐶
ξ𝑡𝑎𝑛𝛽 1
𝐿2
𝜕2 𝑤
𝜕ξ2 +
𝐿
𝐶2
𝜕2 𝑤
𝜕ⴖ2
2
+
2(1−𝑣)
𝐿2 𝐶2
𝜕2 𝑤
𝜕ξ𝜕ⴖ
2
−
𝜕2 𝑤
𝜕ξ2
𝜕2 𝑤
𝜕ⴖ2 d ⴖ
+4Γ0 𝐿 0
1
𝑑ξ
𝑛𝛽
𝐿
𝐶
ξ𝑡𝑎
1+
𝐿
𝐶
ξ𝑡𝑎𝑛𝛽
(ⴖ2 − ⴖ)[δ(ξ − 0)]w(ⴖ, ξ)dⴖ
12](https://image.slidesharecdn.com/skewedplateppt-180509110918/85/Skewed-plate-problem-12-320.jpg)
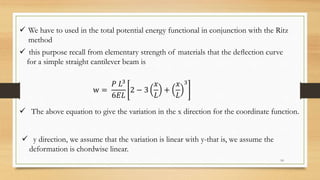
![In considering the integration of the last expression above note from the properties
of delta functions that for a < d < b:
0
1
𝑔 𝑥 𝛿 𝑥 − 𝑑 𝑑𝑥 = 𝑔(𝑑) ( 5 )
Hence we have for the last expression
4Γ0 𝐿 0
1
𝐿
𝐶
ξ𝑡𝑎𝑛𝛽
1+
𝐿
𝐶
ξ𝑡𝑎𝑛𝛽
(ⴖ2 − ⴖ)[δ(ξ − 0)]w(ⴖ, ξ)dⴖ d ξ
= 4Γ0 𝐿 0
1
δ(ξ − 0) 𝐿
𝐶
ξ𝑡𝑎𝑛𝛽
1+
𝐿
𝐶
ξ𝑡𝑎𝑛𝛽
(ⴖ2
− ⴖ)[δ(ξ − 0)]w(ⴖ, ξ)dξ dξ
= 4𝐿Γ0
0
1
(ⴖ2
−ⴖ)𝑤(ⴖ, 0)𝑑ⴖ
13](https://image.slidesharecdn.com/skewedplateppt-180509110918/85/Skewed-plate-problem-13-320.jpg)



The document discusses the analysis of skewed plate problems using the Ritz method, highlighting its applicability to structural mechanics and potential energy principles. It outlines the necessary steps and approximation functions required to solve for deflections and stresses in skewed plates, emphasizing the complexities due to stress concentrations and numerical instabilities. The study concludes that the solution approach can be generalized to other loading scenarios and boundary conditions for skewed plates.