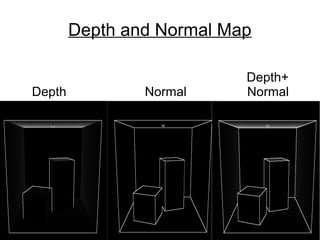
This document discusses techniques for obtaining outlines and silhouettes from 3D objects in real time. It examines using outlines detected from 2D images but says this does not capture object shapes well. Better is using depth maps, which detect boundaries between objects at different depths but not at the same depth or with creases. Normal maps can augment this by detecting changes in surface orientation. The document then defines silhouettes for polygonal meshes and smooth surfaces, discussing using normals and view vectors to detect silhouette points and connect them into curves. It finishes by discussing how to determine visible portions of these curves.