Downloaded 33 times


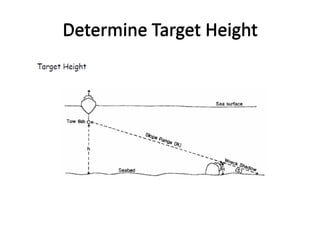

Side scan sonar uses a pulsed beam of sound transmitted horizontally on both sides of a ship to image the seafloor. Reflections are recorded to provide high resolution images of small seafloor objects. It consists of an underwater sensor towed behind the ship connected by cable. For optimal detection, the tow fish height should be maintained between 10-20% of the range scale used, adjusting the range scale or transducer angle if needed. Sonar lines should be run within 20 degrees of tidal streams and along depth contours to maintain tow fish height, or perpendicular to sandwave crests in those areas. Target heights can be estimated using similar triangles and measurements of shadow length and slope range on the sonar image.
















































































