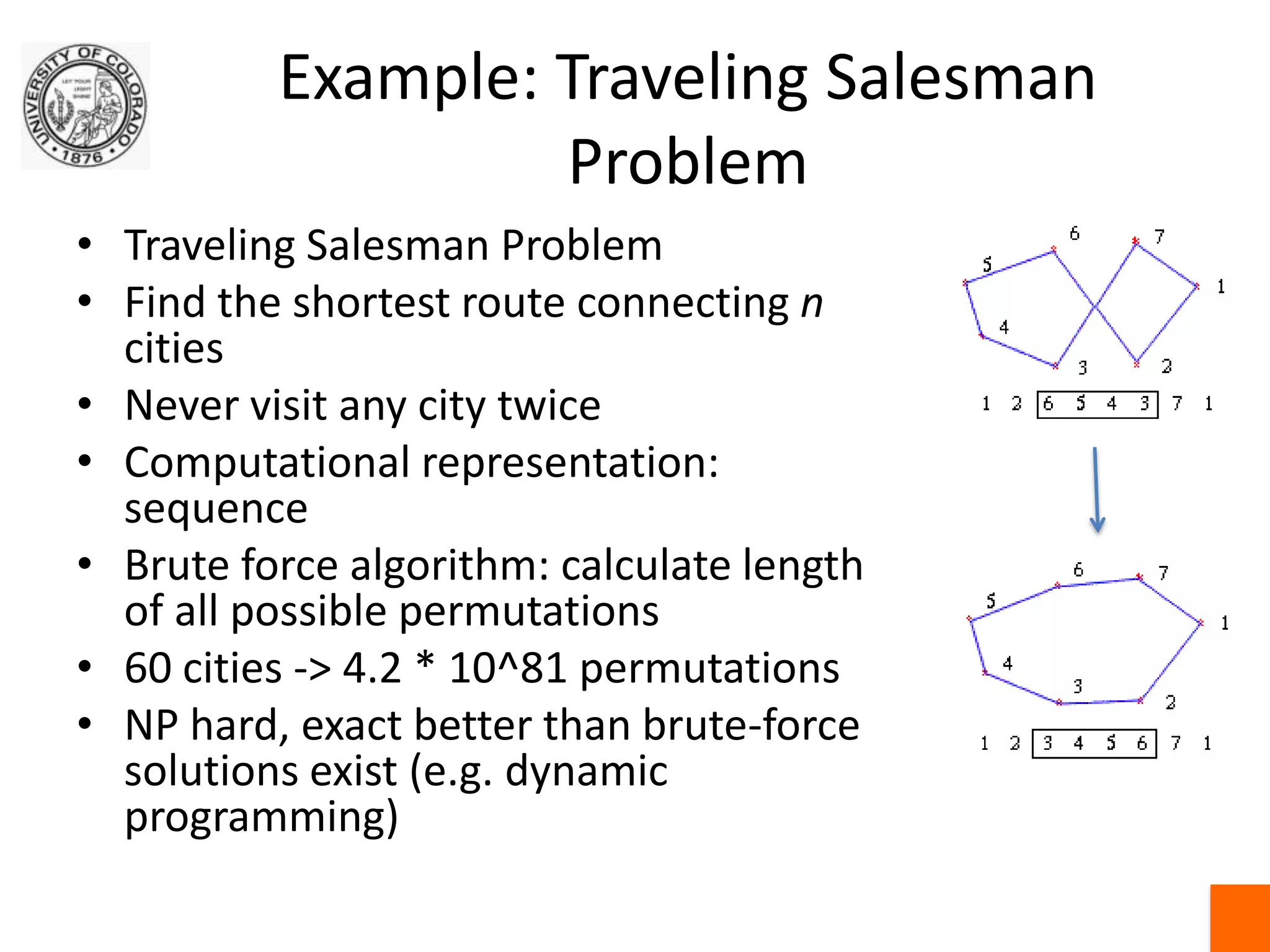
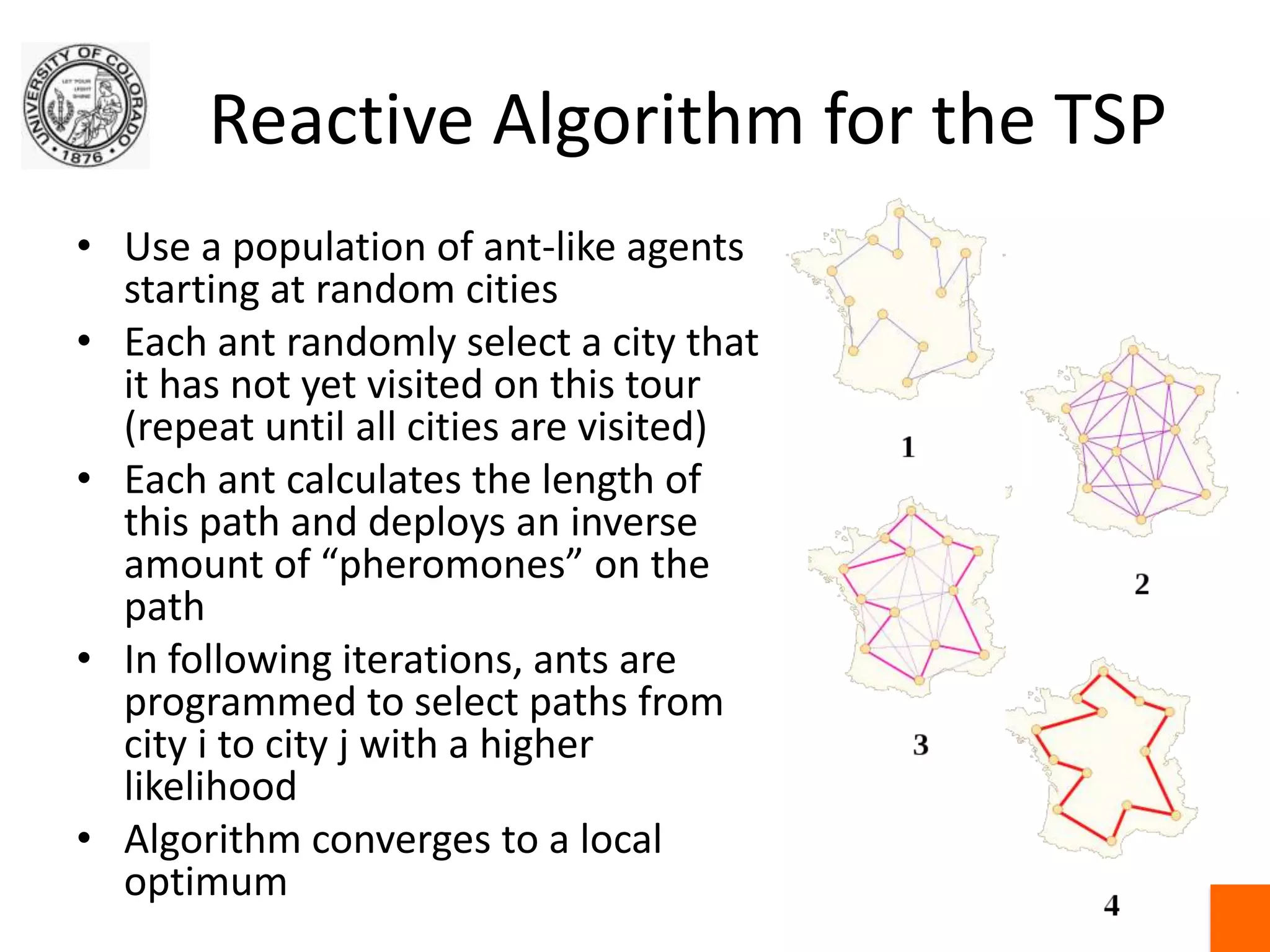
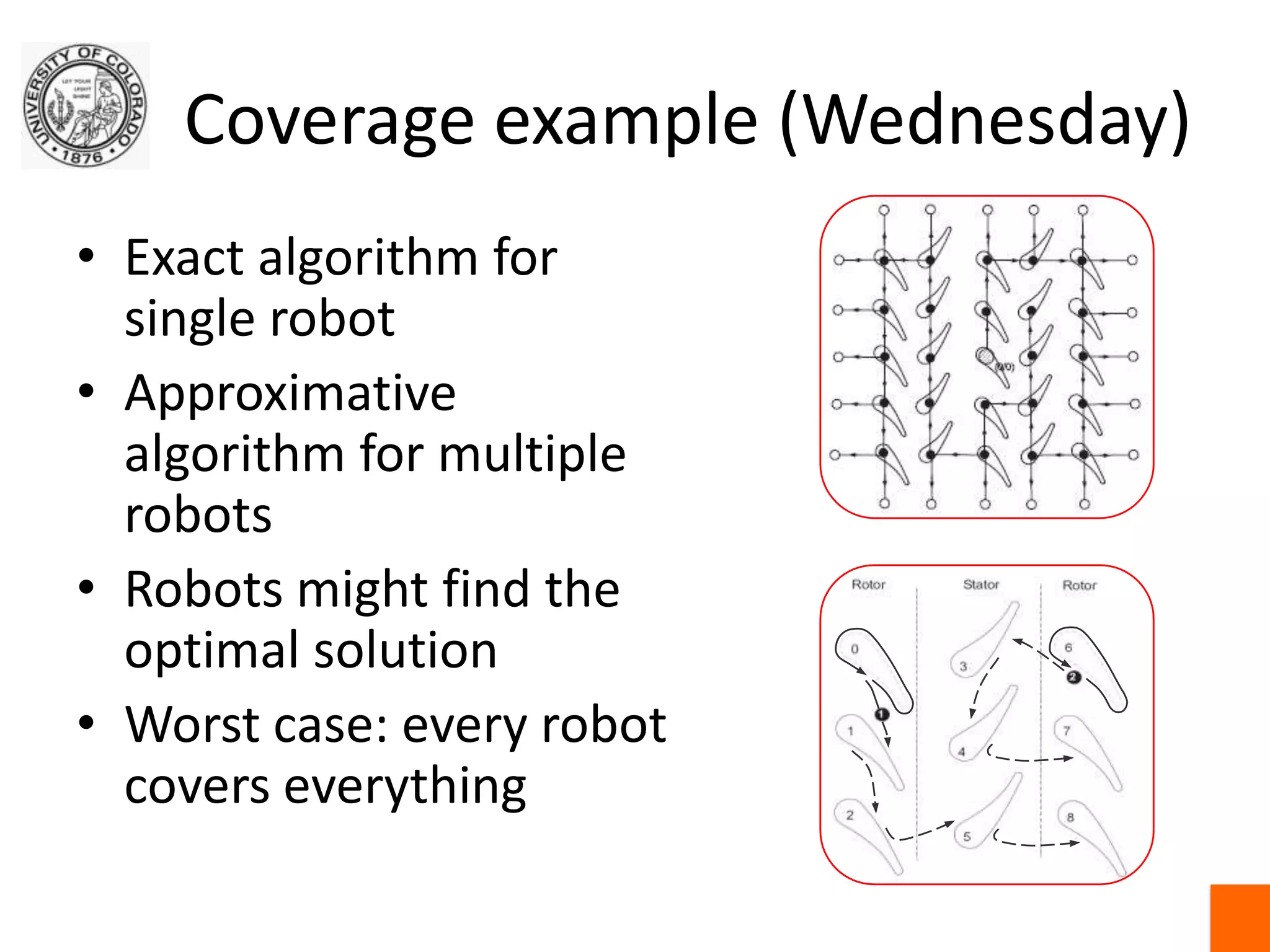
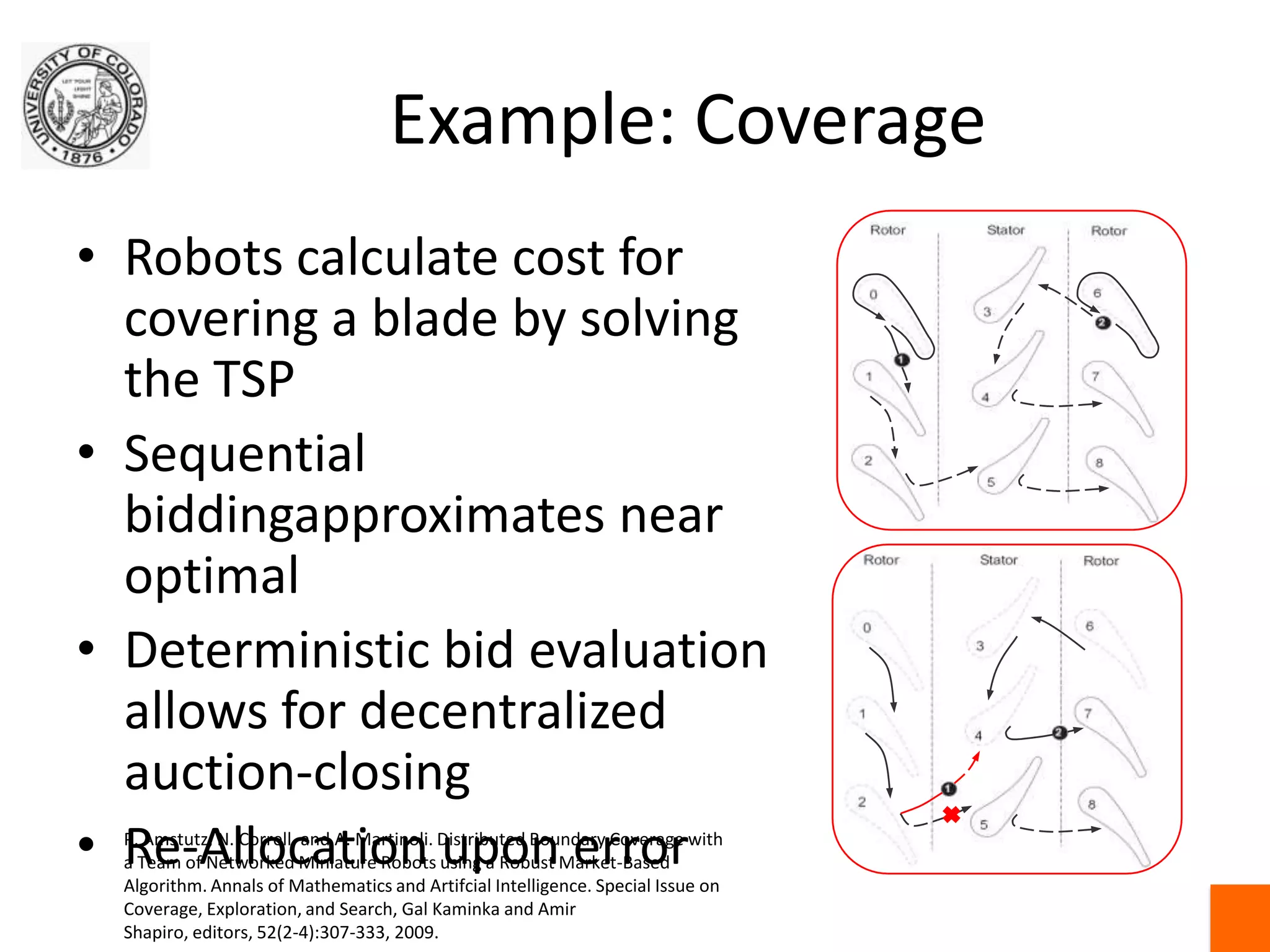
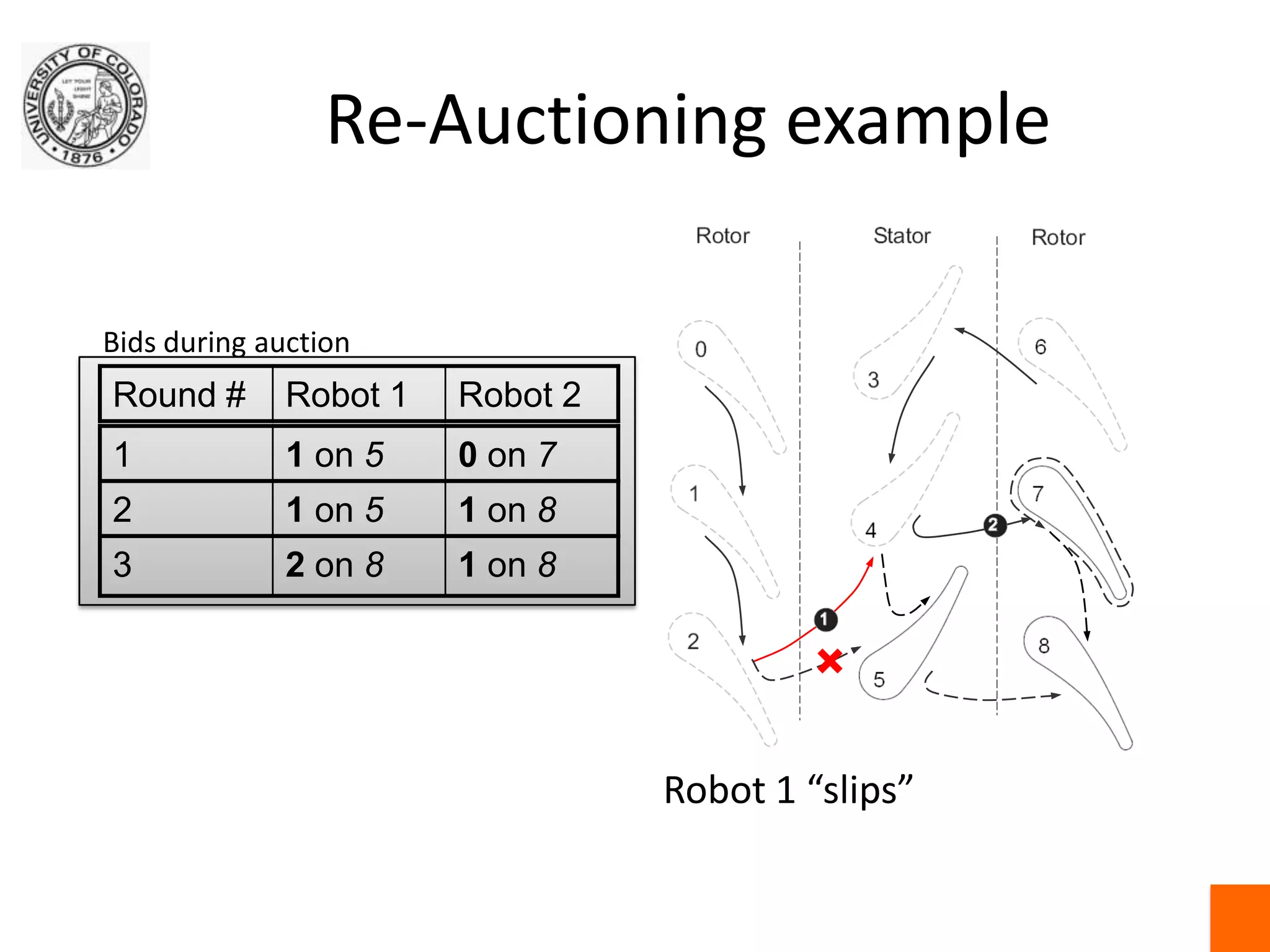
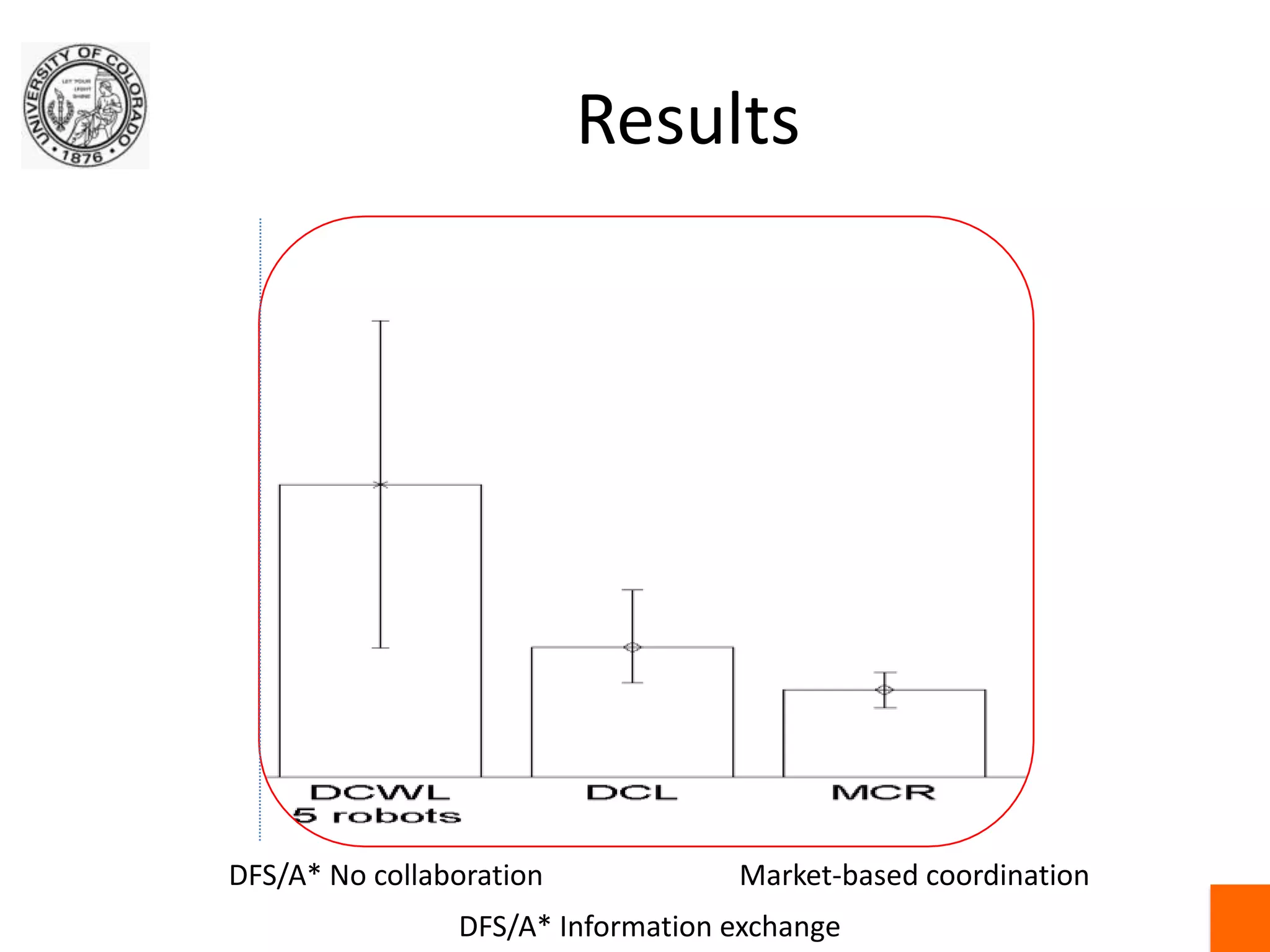
This document discusses exact and approximate algorithms for multi-robot systems. Exact algorithms always find the optimal solution but can be computationally expensive for problems like the traveling salesman problem (TSP) that are NP-hard. Approximate algorithms trade off optimality for speed. Market-based algorithms provide a distributed solution for task allocation problems where robots bid on tasks. Centralized systems require communication but have single points of failure, while distributed algorithms allow for robust self-organization but may produce ambiguous solutions.






































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)