Download as PDF, PPTX








![Markov Game Model for Intrusion Prevention
(1) Network Infrastructure (2) Graph G = N, E
Ndata
Nstart
(3) State space |S| = (w + 1)|N|·m·(m+1)
SA
3 = [0, 0, 0, 0]
SD
3 = [9, 1, 5, 8, 1]
SA
0 = [0, 0, 0, 0]
SD
0 = [0, 0, 0, 0, 0]
SA
1 = [0, 0, 0, 0]
SD
1 = [1, 9, 9, 8, 1]
SA
2 = [0, 0, 0, 0]
SD
2 = [9, 9, 9, 8, 1]
Kim Hammar & Rolf Stadler (KTH) CDIS Workshop October 15, 2020 7 / 12](https://image.slidesharecdn.com/cdishammarstadler15oct2020-201015122316/85/Self-Learning-Systems-for-Cyber-Security-11-320.jpg)
![Markov Game Model for Intrusion Prevention
(1) Network Infrastructure (2) Graph G = N, E
Ndata
Nstart
(3) State space |S| = (w + 1)|N|·m·(m+1)
SA
3 = [0, 0, 0, 0]
SD
3 = [9, 1, 5, 8, 1]
SA
0 = [0, 0, 0, 0]
SD
0 = [0, 0, 0, 0, 0]
SA
1 = [0, 0, 0, 0]
SD
1 = [1, 9, 9, 8, 1]
SA
2 = [0, 0, 0, 0]
SD
2 = [9, 9, 9, 8, 1]
(4) Action space |A| = |N| · (m + 1)
?/0 ?/0 ?/0 ?/0?/0?/0
?/0 ?/0 ?/0
Kim Hammar & Rolf Stadler (KTH) CDIS Workshop October 15, 2020 7 / 12](https://image.slidesharecdn.com/cdishammarstadler15oct2020-201015122316/85/Self-Learning-Systems-for-Cyber-Security-12-320.jpg)
![Markov Game Model for Intrusion Prevention
(1) Network Infrastructure (2) Graph G = N, E
Ndata
Nstart
(3) State space |S| = (w + 1)|N|·m·(m+1)
SA
3 = [0, 0, 0, 0]
SD
3 = [9, 1, 5, 8, 1]
SA
0 = [0, 0, 0, 0]
SD
0 = [0, 0, 0, 0, 0]
SA
1 = [0, 0, 0, 0]
SD
1 = [1, 9, 9, 8, 1]
SA
2 = [0, 0, 0, 0]
SD
2 = [9, 9, 9, 8, 1]
(4) Action space |A| = |N| · (m + 1)
?/0 ?/0 ?/0 ?/0?/0?/0
?/0 ?/0 ?/0
(5) Game Dynamics T , R1, R2, ρ0
4/0 0/1 8/0 ?/0?/0?/0
0/0 9/0 8/0
Kim Hammar & Rolf Stadler (KTH) CDIS Workshop October 15, 2020 7 / 12](https://image.slidesharecdn.com/cdishammarstadler15oct2020-201015122316/85/Self-Learning-Systems-for-Cyber-Security-13-320.jpg)
![Markov Game Model for Intrusion Prevention
(1) Network Infrastructure (2) Graph G = N, E
Ndata
Nstart
(3) State space |S| = (w + 1)|N|·m·(m+1)
SA
3 = [0, 0, 0, 0]
SD
3 = [9, 1, 5, 8, 1]
SA
0 = [0, 0, 0, 0]
SD
0 = [0, 0, 0, 0, 0]
SA
1 = [0, 0, 0, 0]
SD
1 = [1, 9, 9, 8, 1]
SA
2 = [0, 0, 0, 0]
SD
2 = [9, 9, 9, 8, 1]
(4) Action space |A| = |N| · (m + 1)
?/0 ?/0 ?/0 ?/0?/0?/0
?/0 ?/0 ?/0
(5) Game Dynamics T , R1, R2, ρ0
4/0 0/1 8/0 ?/0?/0?/0
0/0 9/0 8/0
∴
- Markov game
- Zero-sum
- 2 players
- Partially observed
- Stochastic elements
- Round-based
MG = S, A1, A2, T , R1, R2, γ, ρ0
Kim Hammar & Rolf Stadler (KTH) CDIS Workshop October 15, 2020 7 / 12](https://image.slidesharecdn.com/cdishammarstadler15oct2020-201015122316/85/Self-Learning-Systems-for-Cyber-Security-14-320.jpg)

![The Reinforcement Learning Problem
Goal:
Approximate π∗
= arg maxπ E
T
t=0 γt
rt+1
Learning Algorithm:
Represent π by πθ
Define objective J(θ) = Eo∼ρπθ ,a∼πθ
[R]
Maximize J(θ) by stochastic gradient ascent with gradient
θJ(θ) = Eo∼ρπθ ,a∼πθ
[ θ log πθ(a|o)Aπθ
(o, a)]
Domain-Specific Challenges:
Partial observability: captured in the model
Large state space |S| = (w + 1)|N|·m·(m+1)
Large action space |A| = |N| · (m + 1)
Non-stationary Environment due to presence of adversary
Agent
Environment
at
st+1
rt+1
Kim Hammar & Rolf Stadler (KTH) CDIS Workshop October 15, 2020 9 / 12](https://image.slidesharecdn.com/cdishammarstadler15oct2020-201015122316/85/Self-Learning-Systems-for-Cyber-Security-16-320.jpg)
![The Reinforcement Learning Problem
Goal:
Approximate π∗
= arg maxπ E
T
t=0 γt
rt+1
Learning Algorithm:
Represent π by πθ
Define objective J(θ) = Eo∼ρπθ ,a∼πθ
[R]
Maximize J(θ) by stochastic gradient ascent with gradient
θJ(θ) = Eo∼ρπθ ,a∼πθ
[ θ log πθ(a|o)Aπθ
(o, a)]
Domain-Specific Challenges:
Partial observability: captured in the model
Large state space |S| = (w + 1)|N|·m·(m+1)
Large action space |A| = |N| · (m + 1)
Non-stationary Environment due to presence of adversary
Agent
Environment
at
st+1
rt+1
Kim Hammar & Rolf Stadler (KTH) CDIS Workshop October 15, 2020 9 / 12](https://image.slidesharecdn.com/cdishammarstadler15oct2020-201015122316/85/Self-Learning-Systems-for-Cyber-Security-17-320.jpg)
![The Reinforcement Learning Problem
Goal:
Approximate π∗
= arg maxπ E
T
t=0 γt
rt+1
Learning Algorithm:
Represent π by πθ
Define objective J(θ) = Eo∼ρπθ ,a∼πθ
[R]
Maximize J(θ) by stochastic gradient ascent with gradient
θJ(θ) = Eo∼ρπθ ,a∼πθ
[ θ log πθ(a|o)Aπθ
(o, a)]
Domain-Specific Challenges:
Partial observability: captured in the model
Large state space |S| = (w + 1)|N|·m·(m+1)
Large action space |A| = |N| · (m + 1)
Non-stationary Environment due to presence of adversary
Agent
Environment
at
st+1
rt+1
Kim Hammar & Rolf Stadler (KTH) CDIS Workshop October 15, 2020 9 / 12](https://image.slidesharecdn.com/cdishammarstadler15oct2020-201015122316/85/Self-Learning-Systems-for-Cyber-Security-18-320.jpg)
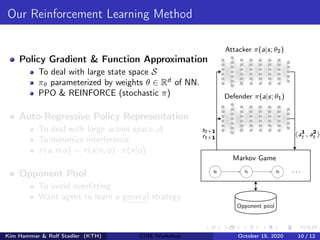


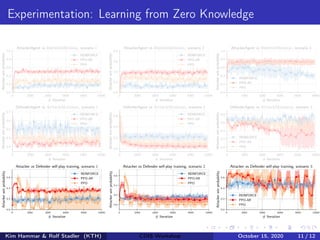



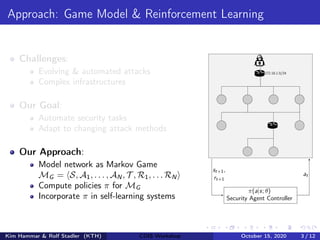
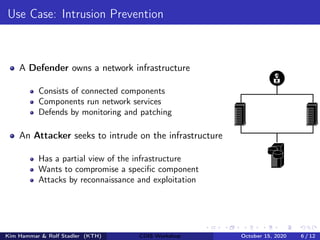
- The document describes using reinforcement learning to model network security as a Markov game and learn security strategies through self-play. - The network infrastructure is modeled as a graph and the interactions between an attacker and defender are framed as a partially observable, zero-sum Markov game. - Reinforcement learning is used to approximate optimal policies for both players by representing their policies with neural networks and optimizing rewards over many episodes of self-play without human intervention.