Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
ST
Uploaded by
Sho Takahashi
2,843 views
RvizPlugin作成入門
第11回ROSJapnUG勉強会での資料です。
Software
◦
Read more
3
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 9
2
/ 9
3
/ 9
4
/ 9
Most read
5
/ 9
6
/ 9
Most read
7
/ 9
8
/ 9
Most read
9
/ 9
More Related Content
PPTX
確率ロボティクス第12回
by
Ryuichi Ueda
PDF
SLAM開発における課題と対策の一例の紹介
by
miyanegi
PDF
複数のGNSSを用いたポーズグラフ最適化
by
TaroSuzuki15
PDF
UnityとROSの連携について
by
UnityTechnologiesJapan002
PPTX
mcl_3dl: amcl並に軽量な3-D/6-DoFローカリゼーションパッケージ
by
Atsushi Watanabe
PDF
tf,tf2完全理解
by
Koji Terada
PPTX
Active Convolution, Deformable Convolution ―形状・スケールを学習可能なConvolution―
by
Yosuke Shinya
PDF
Transformer 動向調査 in 画像認識(修正版)
by
Kazuki Maeno
確率ロボティクス第12回
by
Ryuichi Ueda
SLAM開発における課題と対策の一例の紹介
by
miyanegi
複数のGNSSを用いたポーズグラフ最適化
by
TaroSuzuki15
UnityとROSの連携について
by
UnityTechnologiesJapan002
mcl_3dl: amcl並に軽量な3-D/6-DoFローカリゼーションパッケージ
by
Atsushi Watanabe
tf,tf2完全理解
by
Koji Terada
Active Convolution, Deformable Convolution ―形状・スケールを学習可能なConvolution―
by
Yosuke Shinya
Transformer 動向調査 in 画像認識(修正版)
by
Kazuki Maeno
What's hot
PDF
Jetson活用セミナー ROS2自律走行実現に向けて
by
Fixstars Corporation
PDF
Siftによる特徴点抽出
by
Masato Nakai
PDF
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
PDF
Sift特徴量について
by
la_flance
PDF
論文紹介「PointNetLK: Robust & Efficient Point Cloud Registration Using PointNet」
by
Naoya Chiba
PPTX
【論文読み会】BEiT_BERT Pre-Training of Image Transformers.pptx
by
ARISE analytics
PDF
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
PDF
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
PDF
5分でわかるかもしれないglmnet
by
Nagi Teramo
PPTX
画像キャプションの自動生成
by
Yoshitaka Ushiku
PPTX
これからの Vision & Language ~ Acadexit した4つの理由
by
Yoshitaka Ushiku
PDF
Gazebo/ROSで力覚センサプラグインを使う
by
HDeanK
PDF
POMDP下での強化学習の基礎と応用
by
Yasunori Ozaki
PDF
深層強化学習と実装例
by
Deep Learning Lab(ディープラーニング・ラボ)
PDF
【DL輪読会】Segment Anything
by
Deep Learning JP
PDF
3D CNNによる人物行動認識の動向
by
Kensho Hara
PDF
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
by
Takuya Minagawa
PDF
20190825 vins mono
by
Takuya Minagawa
PPTX
モデル高速化百選
by
Yusuke Uchida
PDF
2019年度チュートリアルBPE
by
広樹 本間
Jetson活用セミナー ROS2自律走行実現に向けて
by
Fixstars Corporation
Siftによる特徴点抽出
by
Masato Nakai
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
Sift特徴量について
by
la_flance
論文紹介「PointNetLK: Robust & Efficient Point Cloud Registration Using PointNet」
by
Naoya Chiba
【論文読み会】BEiT_BERT Pre-Training of Image Transformers.pptx
by
ARISE analytics
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
5分でわかるかもしれないglmnet
by
Nagi Teramo
画像キャプションの自動生成
by
Yoshitaka Ushiku
これからの Vision & Language ~ Acadexit した4つの理由
by
Yoshitaka Ushiku
Gazebo/ROSで力覚センサプラグインを使う
by
HDeanK
POMDP下での強化学習の基礎と応用
by
Yasunori Ozaki
深層強化学習と実装例
by
Deep Learning Lab(ディープラーニング・ラボ)
【DL輪読会】Segment Anything
by
Deep Learning JP
3D CNNによる人物行動認識の動向
by
Kensho Hara
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
by
Takuya Minagawa
20190825 vins mono
by
Takuya Minagawa
モデル高速化百選
by
Yusuke Uchida
2019年度チュートリアルBPE
by
広樹 本間
RvizPlugin作成入門
1.
2017/07/19 株式会社テクノロード Rviz プラグイン作成入門 第11回ROS
JapanUG 勉強会 2017/07/19 ShoTakahashi
2.
2017/07/19 株式会社テクノロード 目次 ● 動機 ● 今回作るもの ● 環境 ● いざRvizプラグイン作成入門 ● 動作確認 ● Rviz
プラグイン作成まとめ ● 参考文献
3.
2017/07/19 株式会社テクノロード 動機 ● Rviz
に独自の GUI を追加し、操作を簡単にしたい! ● しかし、日本語のドキュメントが少ない? → あるにはあったけど(※1)、 hydro の頃のやつとか古い ● 多分ROSやってる人達は頭が良すぎて、 ROS のソースを直接読ん で、作り方がわかっちゃうんだろうな・・・ ● よし自分の為に、シンプルな奴を作って、ついでに LT のネタにしよ う!
4.
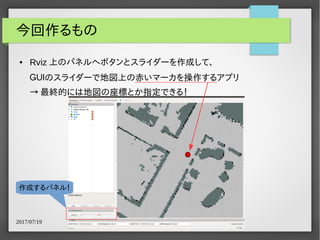
2017/07/19 株式会社テクノロード 今回作るもの ● Rviz
上のパネルへボタンとスライダーを作成して、 GUIのスライダーで地図上の赤いマーカを操作するアプリ → 最終的には地図の座標とか指定できる! 作成するパネル!
5.
2017/07/19 株式会社テクノロード 環境 ● OS
: ubuntu16.04LTS ● ROS ver : Kinetic Kame ● Qt ver : 5.5.1
6.
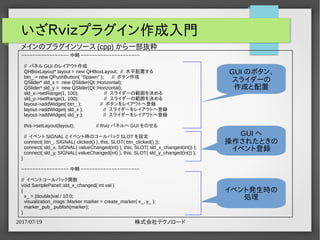
2017/07/19 株式会社テクノロード いざRvizプラグイン作成入門 ~~~~~~~~~~~~~~~~~ 中略
~~~~~~~~~~~~~~~~~~~~~ // パネル GUI のレイアウト作成 QHBoxLayout* layout = new QHBoxLayout; // 水平配置する btn_ = new QPushButton( "Spawn" ); // ボタン作成 QSlider* sld_x = new QSlider(Qt::Horizontal); QSlider* sld_y = new QSlider(Qt::Horizontal); sld_x->setRange(1, 100); // スライダーの範囲を決める sld_y->setRange(1, 100); // スライダーの範囲を決める layout->addWidget( btn_ ); // ボタンをレイアウトへ登録 layout->addWidget( sld_x ); // スライダーをレイアウトへ登録 layout->addWidget( sld_y ); // スライダーをレイアウトへ登録 this->setLayout(layout); // Rviz パネルへ GUI をのせる // イベント SIGNAL とイベント時のコールバック SLOT を設定 connect( btn_, SIGNAL( clicked() ), this, SLOT( btn_clicked() )); connect( sld_x, SIGNAL( valueChanged(int) ), this, SLOT( sld_x_changed(int)) ); connect( sld_y, SIGNAL( valueChanged(int) ), this, SLOT( sld_y_changed(int)) ); } ~~~~~~~~~~~~~~~~~ 中略 ~~~~~~~~~~~~~~~~~~~~~ // イベントコールバック関数 void SamplePanel::sld_x_changed( int val ) { x_ = (double)val / 10.0; visualization_msgs::Marker marker = create_marker( x_, y_ ); marker_pub_.publish(marker); } メインのプラグインソース (cpp) から一部抜粋 GUI のボタン、 スライダーの 作成と配置 GUI へ 操作されたときの イベント登録 イベント発生時の 処理
7.
2017/07/19 株式会社テクノロード 動作確認
8.
2017/07/19 株式会社テクノロード Rviz プラグイン作成まとめ ● Qtの勉強も出来て一石二鳥 →
Linux上で他のGUIアプリ構築にも役立つ! ● 今回は時間がないので、 Rviz プラグインの紹介までですが、 内容に興味がある人は github を見てください →https://github.com/takahashi-e6/rviz_panel_sample ● 作るのに手間が掛かるが、ターミナルコマンドじゃなくてGUIで操 作できるってのはわかりやすい!
9.
2017/07/19 株式会社テクノロード 参考文献 ● New
Dockable Panel (日本語) http://wiki.ros.org/ja/rviz/Tutorials/hydro/Plugins%3A %20New%20Dockable%20Panel ● New Tool Type (日本語) http://wiki.ros.org/ja/rviz/Tutorials/Plugins%3A%20New% 20Tool%20Type
Download