Downloaded 24 times



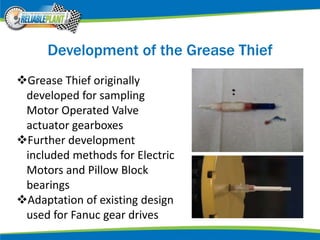




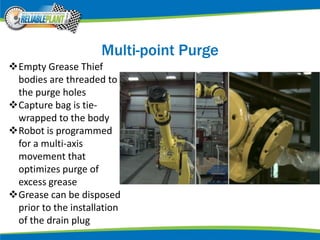
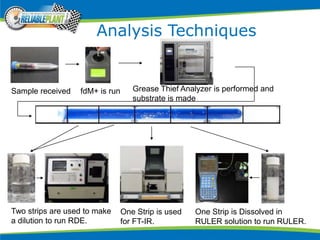
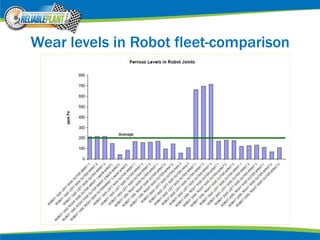

The document outlines the importance of grease sampling and analysis for robotic gear drives, particularly in manufacturing and automotive applications. It discusses methods for sampling grease, the development of a device called the grease thief for efficient sampling without disassembly, and the analysis techniques used to evaluate grease condition and predict potential failures. The document emphasizes the need for condition-based maintenance to optimize grease changeouts and identifies issues related to grease mixing and degradation.