Download as PDF, PPTX



![The Basic (Generative) Model
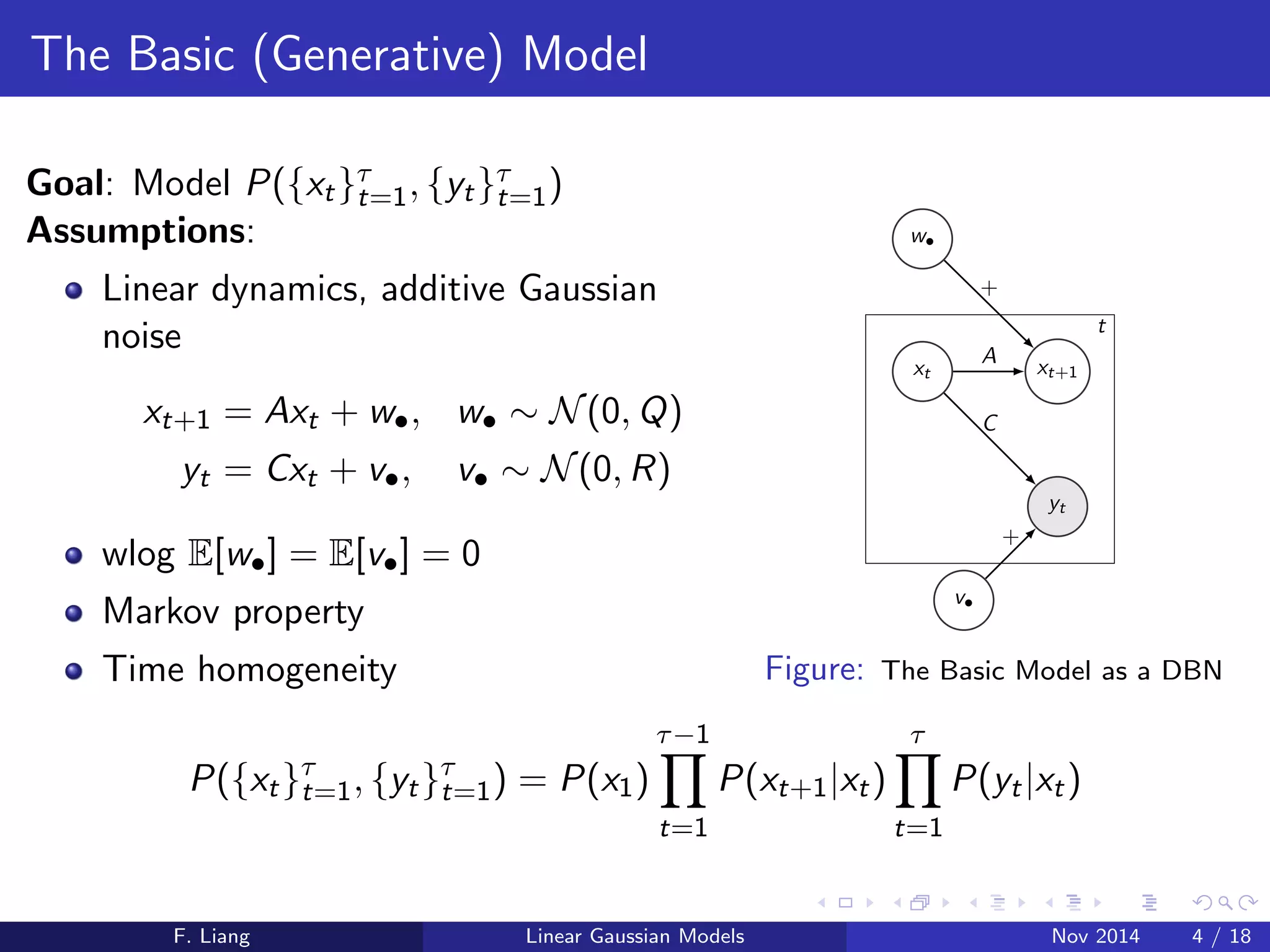
Goal: Model P(fxtgt
=1; fytgt
=1)
Assumptions:
Linear dynamics, additive Gaussian
noise
xt+1 = Axt + w; w N(0;Q)
yt = Cxt + v; v N(0; R)
wlog E[w] = E[v] = 0
Markov property
Time homogeneity
w
+
xt xt+1
yt
v
A
C
+
t
Figure: The Basic Model as a DBN
P(fxtgt
=1; fytgt
=1) = P(x1)
Y1
t=1
P(xt+1jxt )
Y
t=1
P(yt jxt )
F. Liang Linear Gaussian Models Nov 2014 4 / 18](https://image.slidesharecdn.com/roweis-1999-141111235734-conversion-gate02/75/A-Unifying-Review-of-Gaussian-Linear-Models-Roweis-1999-5-2048.jpg)












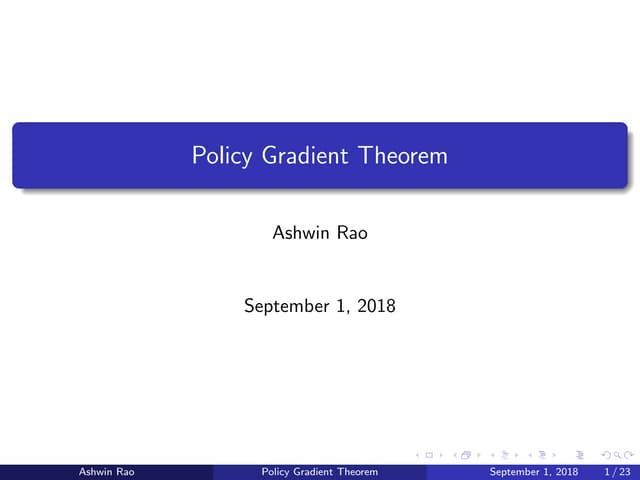
![Discrete-State Modeling: Winner-Takes-All (WTA)
Non-linearity
Assume: x discretely supported,
R
7!
P
Winner-Takes-All Non-Linearity: WTA[x] = ei where i = arg maxj xj
xt+1 = WTA[Axt + w] w N(;Q)
yt = Cxt + v v N(0; R)
x WTA[N(; )] de](https://image.slidesharecdn.com/roweis-1999-141111235734-conversion-gate02/75/A-Unifying-Review-of-Gaussian-Linear-Models-Roweis-1999-18-2048.jpg)

This document reviews various linear Gaussian models, emphasizing their relationships and applications, including factor analysis, PCA, Gaussian mixtures, and hidden Markov models. It discusses the basic inference and learning problems associated with these models, along with the expectation-maximization algorithm for training. The paper concludes by critiquing the models' efficiency and suggesting areas for future research.













































































![ict_presentation_final_final_final[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/ictpresentationfinalfinalfinal1-251230145259-2b4839bd-thumbnail.jpg?width=640&height=640&fit=bounds)







