Downloaded 112 times
![http://roboticvision.org/
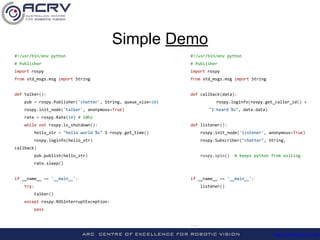
Logging & Playback
Try it out!
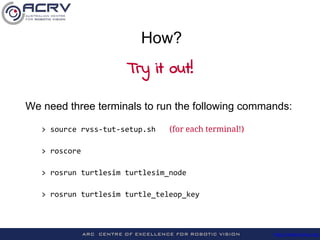
We need three terminals to run:
> rosbag record /turtle1/cmd_vel -O test
[ move the teleop-ed turtle …]^C
> rosbag info test.bag
path: test.bag
duration: 0.6s
messages: 7
topics: /turtle1/cmd_vel 7 msgs : geometry_msgs/Twist
> rosbag play test.bag](https://image.slidesharecdn.com/rosintro-150318063616-conversion-gate01/85/ROS-Hands-On-Intro-Tutorial-Robotic-Vision-Summer-School-2015-RVSS-ACRV-11-320.jpg)

The document provides an introduction to the Robot Operating System (ROS), covering its purpose, installation process, fundamental concepts, and basic commands. It emphasizes the use of ROS for abstracting distributed computation and facilitating software reuse, as well as tools for logging and playback. Additionally, it offers resources for further reading and examples of practical applications using ROS.











![[2014 CodeEngn Conference 10] 정광운 - 안드로이드에서도 한번 후킹을 해볼까 (Hooking on Android)](https://cdn.slidesharecdn.com/ss_thumbnails/2014codeengnconference10hookingonandroid-140713113701-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)




![[CCC-28c3] Post Memory Corruption Memory Analysis](https://cdn.slidesharecdn.com/ss_thumbnails/28c3-120107122834-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)































![Robot operating system [ROS]](https://cdn.slidesharecdn.com/ss_thumbnails/robotoperatingsystemautosaved-200614222945-thumbnail.jpg?width=640&height=640&fit=bounds)



















![ACRV Research Fellow Intro/Tutorial [Vision and Action]](https://cdn.slidesharecdn.com/ss_thumbnails/researchfellow-introtutorial-juxi-150209045458-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)




![How does it feel to be a SpaceMaster? [Erasmus Mundus - ACE Talk]](https://cdn.slidesharecdn.com/ss_thumbnails/juxi-porto-140205151542-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



















