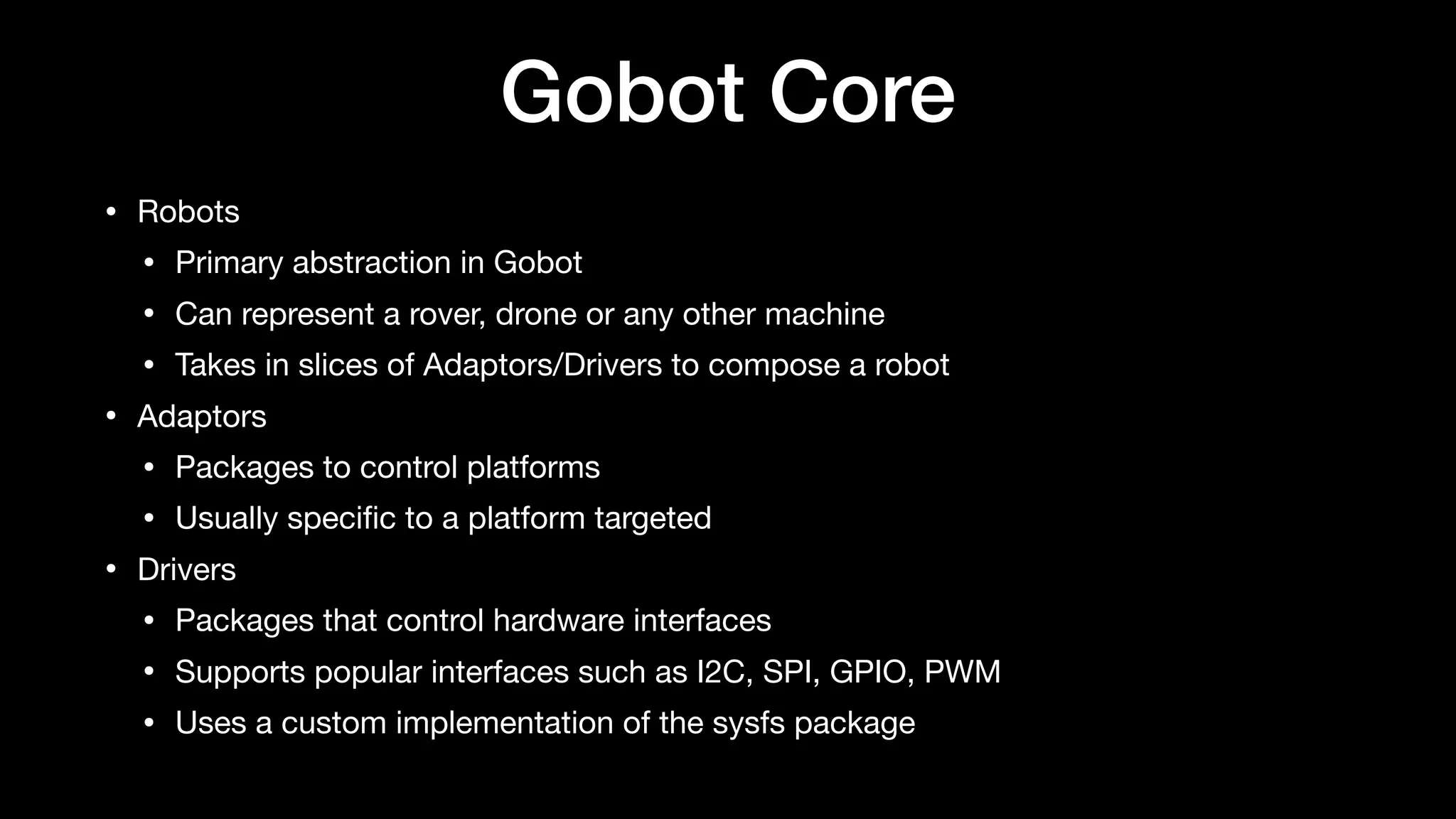
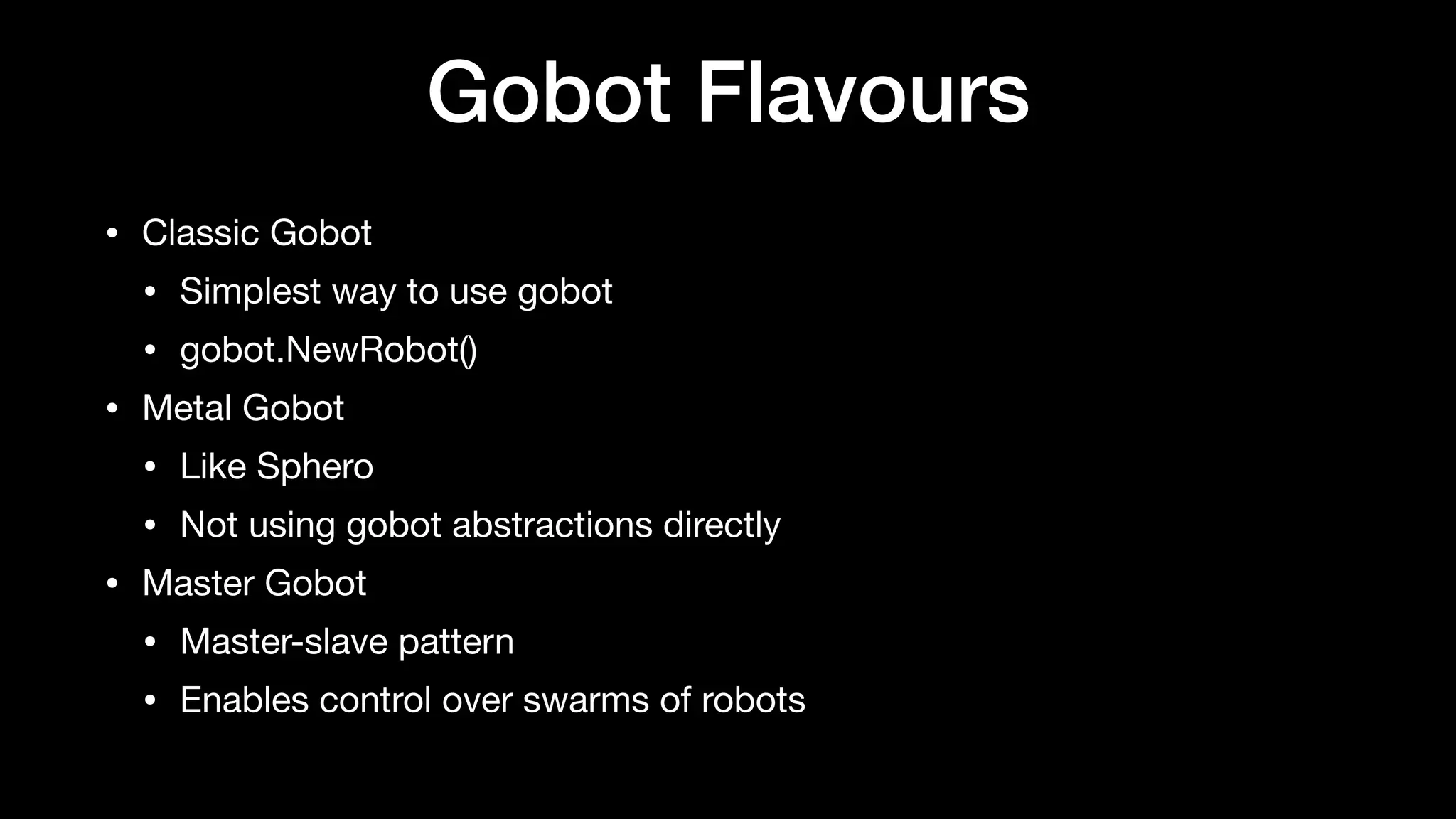
This document provides an overview of killer robots using the Golang programming language. It discusses the architecture of ROS (Robot Operating System) and how it can be used with Golang through the Gobot framework. Gobot provides an abstraction layer for robotics and IoT that supports various hardware platforms and interface drivers. The document provides examples of how to set up Gobot and integrate ROS functionality for controlling robots using Golang.

![Things I wish I knew
• Inverse Kinematics
• Physics thing
• Calculates the angles for joints on a limb based on the tip
• Could also be the force needed to move each joint to the
appropriate position so that the tip of the limb arrives at a given
coordinate as a result
• Quaternion
• Another physics thing
• Used to calculate the rotation of a limb/joint of a robot
• The coordinates of a joint would be in the form
[ (x, y, z) (x, y, z, w) ]](https://image.slidesharecdn.com/gobot-golangmelbourne-180703052230/75/Killer-Robots-101-with-Gobot-6-2048.jpg)
























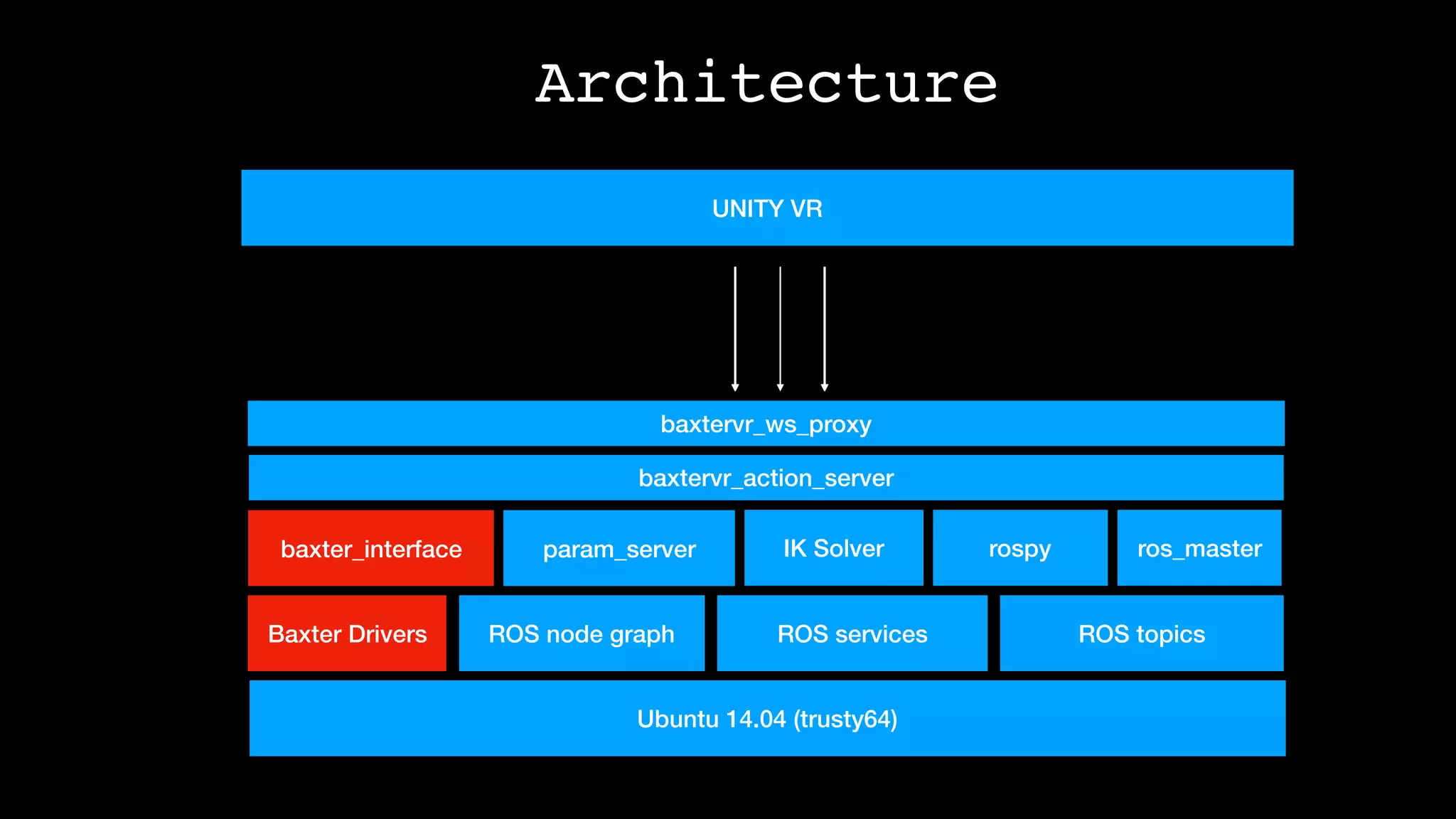
![Robot operating system [ROS]](https://cdn.slidesharecdn.com/ss_thumbnails/robotoperatingsystemautosaved-200614222945-thumbnail.jpg?width=640&height=640&fit=bounds)





















![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)
