Download as PDF, PPTX





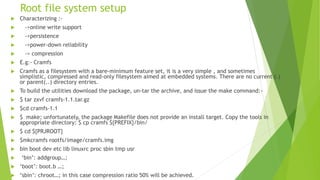
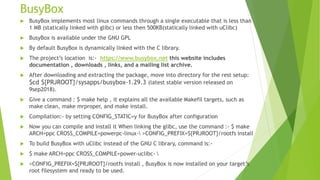
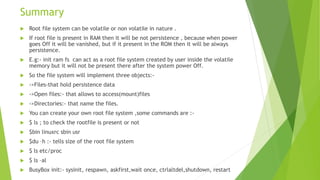


The document provides a comprehensive overview of root file systems for embedded systems, discussing their types, contents, and the setup process. It emphasizes the importance of understanding various file systems such as block-device, flash, in-memory, user space, and compressed read-only file systems, as well as tools like BusyBox. The document also outlines steps for creating and managing root file systems, highlighting the persistence of data based on storage location.