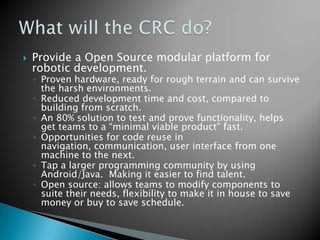
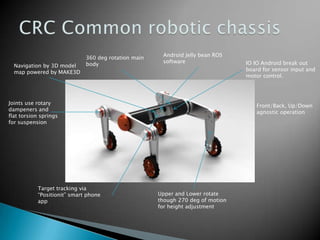
The document describes a modular open source robotic platform called CRC that can be configured in different ways to perform various functions. It discusses how CRC provides hardware that is ready for rough terrain and harsh environments. It also reduces development time and costs compared to building a robot from scratch. CRC uses Android and Java programming which allows for code reuse and finds talent more easily. The platform is open source so components can be modified or produced in-house to save money or time. It then shows several example configurations of CRC including a basic tribot, automotive chassis, legged chassis, quadcopter, boat, and submersible vehicle.