Download to read offline
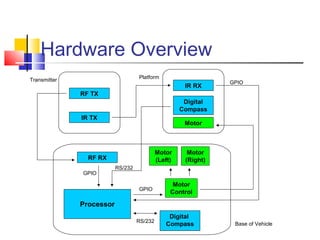
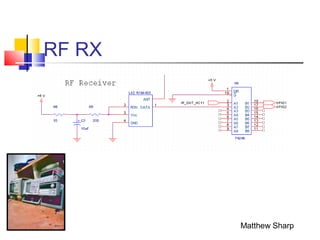
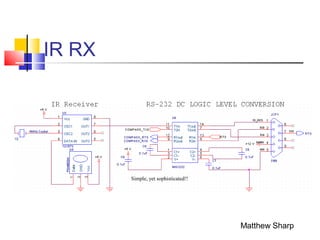
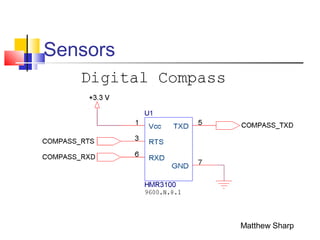
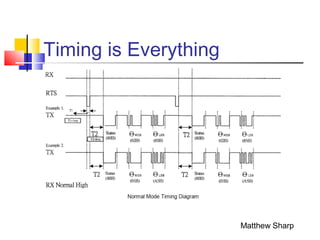
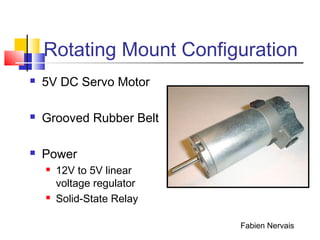
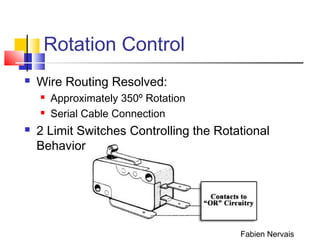
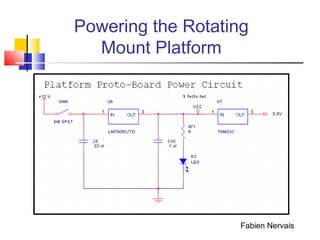
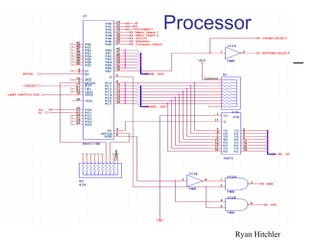
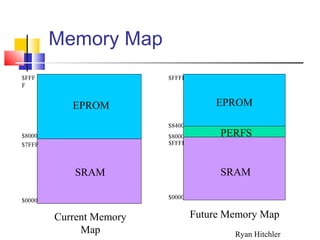
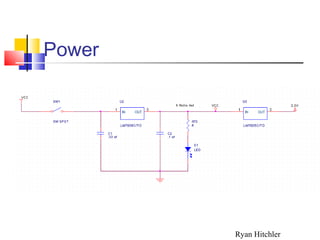
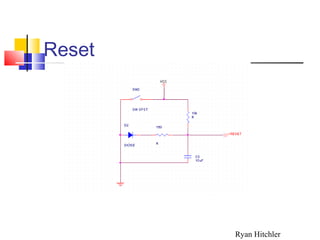
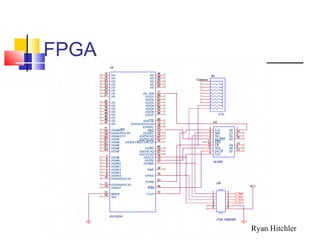
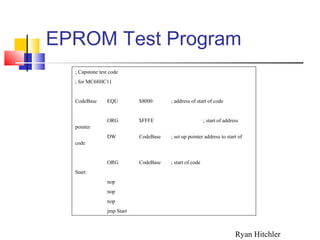
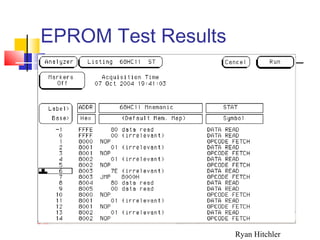
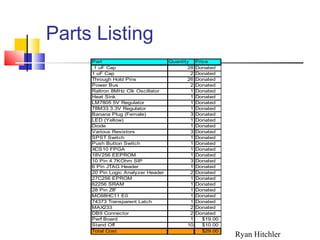
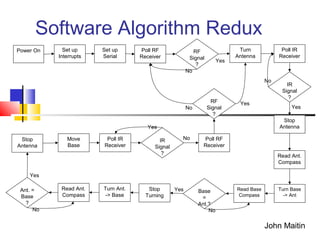
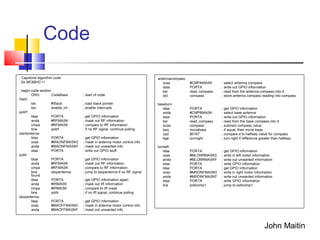
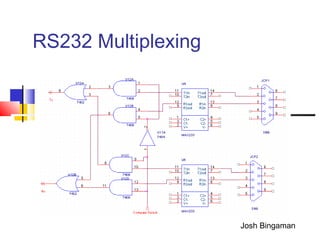
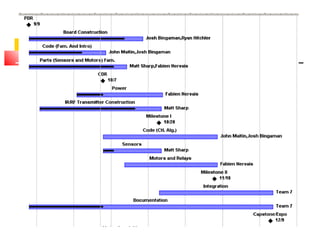

This document describes the design of a radio frequency navigational tracker intended to function as a golf caddy that follows a golfer. The system includes a transmitter worn by the golfer that sends RF and IR signals. A vehicle platform receives these signals using an RF receiver and IR receiver. A microcontroller on the vehicle uses the signal information along with a digital compass and motor controls to rotate an antenna and move the base to track the transmitter. The design documents include block diagrams, hardware components, software algorithms, and memory mapping approaches.