REINFORCEMENT LEARNING IN DECISION MAKING SEMINAR REPORT
1.
1
ABSTRACT
In a varietyof domains, Reinforcement Learning (RL) has shown
impressive results in solving sequential decision-making problems.
However, in dynamic environments where task goals, reward structures, or
system dynamics change over time, its performance tends to deteriorate.
This study's main goal is to investigate and assess RL algorithms that can
successfully adjust to such non-stationary circumstances.
Several RL techniques, such as Deep Q-Networks (DQN), Proximal Policy
Optimization (PPO), and Model-Agnostic Meta-Learning (MAML), were
used and examined in order to address this. In order to incorporate task
variability, environmental drift, and changing reward landscapes, custom
dynamic simulation environments were created. Each algorithm's
performance was evaluated using its ability to adapt, remain stable, and
learn effectively in a variety of scenarios.
The findings show that traditional RL models exhibit considerable
performance declines when environmental conditions change, indicating a
lack of long-term adaptability. On the other hand, continual learning and
meta-learning strategies showed greater adaptability and quicker
convergence following modifications. Interestingly, MAML-based agents
required little retraining to quickly adjust to new tasks.
In conclusion, adaptive architectures that integrate memory-based
techniques and meta-learning are highly advantageous for reinforcement
learning in dynamic environments. Real-world applications like adaptive
control systems, autonomous navigation, and real-time decision-making in
unpredictable situations will be greatly impacted by these findings. To
further improve adaptability, future studies will investigate the integration
of transfer learning and unsupervised learning.
2.
2
TABLE OF CONTENT
4.Introduction...............................................................[3]
4.1 Context
4.2 Problem Statement
4.3 Objectives
4.4 Scope
5. Background Information...........................................[6]
5.1 Theoretical Foundation
5.2 Literature Review
6. Methodology..............................................................[8]
6.1 Approach
6.2 Data Sources
6.3 Tools and Technologies
7. Main
Content....................................................................[10]
7.1 Data Structures and Their Applications
7.2 Algorithms o Real-World Applications
7.3 Diagrams and Visual Aids
8. Challenges and Limitations.....................................[15]
8.1 Critical Analysis
8.2 Potential Issues
9. Future Directions....................................................[17]
9.1 Emerging Trends
9.2 Research Opportunities
10. Conclusion...........................................................[19]
10.1 Summary
10.2 Final Thoughts
11. References...........................................................[20]
3.
3
4. Introduction
4.1 Context
Asubfield of machine learning called reinforcement learning (RL) studies how
agents should behave in a given setting to optimize the accumulation of
rewards. Behavioral psychology serves as the inspiration for reinforcement
learning (RL), which excels at sequential decision-making problems where
learning takes place through interactions with the environment rather than
labeled data. Robotics, game AI (like AlphaGo and OpenAI Five),
recommendation systems, autonomous cars, and industrial automation are just a
few of the fields in which RL has revolutionized computer science and
engineering in recent years.
RL algorithms typically operate in a stationary environment, where the reward
function and system dynamics don't change during training or deployment. But
in practical applications, this presumption is frequently broken. In smart cities,
for example, traffic patterns can vary according to time, weather, or population
density; recommendation systems' user preferences change over time; and the
financial market is naturally unstable. Because of the complexity and realism of
these dynamic environments, previously learned policies may become less
effective or possibly fail entirely if the agent is unable to adjust.
For RL to be more widely applied in real-world systems, non-stationarity issues
must be resolved. It requires RL agents to continuously and independently
adjust to environmental changes in addition to learning the best policies.
Advanced approaches like meta-reinforcement learning, continual learning, and
environment modeling have emerged as a result of this changing landscape, and
they are all intended to improve the adaptability and resilience of RL systems in
dynamic situations.
4.2 Problem Statement
Although RL has shown remarkable success in static and controlled
environments, dynamic and unpredictable changes drastically reduce its
efficacy. The majority of common reinforcement learning algorithms, such as
Proximal Policy Optimization (PPO) and Deep Q-Networks (DQN), are trained
assuming that the behavior of the environment stays constant. Once trained,
these models are unable to adjust to changes in reward signals, state
distributions, or transition probabilities without having to be retrained from
scratch, which is a time-consuming and computationally costly procedure.
4.
4
The main issueis that current RL algorithms are not generalizable or adaptive in
dynamic environments. They frequently don't:
1. Quickly identify environmental changes.
2. While adjusting to new tasks, retain previously learned information.
3 .Update policies effectively without forgetting them.
As a result, this restricts their use in situations that call for constant adaptation
and learning from small amounts of data.
❖ 4.3 Objectives
This report aims to address the limitations of traditional RL in dynamic
environments through a comparative and experimental study. The key
objectives of this research are as follows:
1. Identify and analyze the challenges faced by standard RL algorithms
when operating in non-stationary environments.
2. Implement and evaluate adaptive RL approaches such as:
o Meta-Reinforcement Learning (e.g., Model-Agnostic Meta-
Learning – MAML), which enables agents to learn how to learn,
thus allowing rapid adaptation to new tasks.
o Continual Learning techniques that allow agents to incrementally
adapt while retaining past knowledge.
3. Design and simulate dynamic environments that introduce controlled
changes in reward functions, task goals, and transition dynamics to test
agent adaptability.
4. Measure and compare agent performance based on convergence
speed, policy robustness, adaptability to change, and resistance to
performance degradation.
5. Propose strategies or architectures that enhance the flexibility and
long-term performance of RL agents in dynamic, uncertain settings.
4.4 Scope
This report is carefully focused on exploring how well selected reinforcement
learning (RL) algorithms adapt to dynamic environments. To keep the
discussion both meaningful and manageable, the scope is defined by a few key
inclusions and exclusions.
What’s included:
5.
5
• A comparativereview of specific RL algorithms—namely Deep Q-
Networks (DQN), Proximal Policy Optimization (PPO), and Model-
Agnostic Meta-Learning (MAML)—with an emphasis on how they
perform when the environment changes over time.
• The creation and use of synthetic environments that mimic real-world
dynamics, such as changing rewards, shifting state distributions, and
evolving tasks.
• A quantitative analysis of each algorithm’s performance using practical
metrics like cumulative rewards, how quickly they adapt to changes, and
how stable their behavior remains under pressure.
• A discussion of current trends and promising techniques in the field of
adaptive RL, particularly focusing on methods like meta-learning and
continual learning that are designed to help agents handle change more
effectively.
What’s not included:
• Implementation on physical hardware or real-world systems, such as
robotic platforms or edge devices. This report is focused on simulation-
based experiments.
• Deep exploration of other machine learning paradigms like supervised,
unsupervised, or self-supervised learning—except where they directly
relate to enhancing RL in dynamic settings.
• Theoretical deep dives, such as formal proofs or convergence guarantees,
which are beyond the practical focus of this report.
6.
6
5. Background Information
5.1Theoretical Foundation
Reinforcement Learning (RL) is a learning paradigm where an agent interacts
with an environment to learn optimal behaviors through trial and error. The
environment is typically modeled as a Markov Decision Process (MDP),
defined by the tuple (S, A, P, R, γ), where:
• S is the set of states,
• A is the set of possible actions,
• P represents the transition probabilities (P(s'|s, a)),
• R is the reward function (R(s, a)),
• γ is the discount factor (0 < γ ≤ 1) for future rewards.
At each time step, the agent observes the current state, selects an action,
receives a reward, and transitions to a new state. The goal is to learn a policy
π(a|s) that maximizes the expected cumulative reward over time, known as the
return.
Two main categories of RL algorithms are:
• Model-Free Methods: These learn directly from experience without
building an explicit model of the environment (e.g., Q-learning, DQN,
PPO).
• Model-Based Methods: These involve learning a model of the
environment to plan and simulate future outcomes.
A crucial concept in RL is the exploration-exploitation trade-off. Agents must
explore to discover potentially better actions, while also exploiting known
actions that yield high rewards.
Dynamic Environments refer to settings where the environment's dynamics
(transition probabilities, reward functions, or available actions) change over
time. These changes violate the stationarity assumption of most RL algorithms,
making learning and adaptation more complex.
To tackle this, advanced methods like:
• Meta-Reinforcement Learning: “Learning to learn,” where agents learn
a general strategy to adapt quickly to new tasks.
• Continual Learning: Maintaining performance on old tasks while
learning new ones, avoiding “catastrophic forgetting.”
7.
7
• Contextual RL:Incorporating additional information about changing
environments to adapt behavior accordingly.
5.2 Literature Review
Over the past decade, significant progress has been made in reinforcement
learning, with deep RL architectures like Deep Q-Networks (DQN) and
Proximal Policy Optimization (PPO) demonstrating strong performance in
static environments. DQN, introduced by Mnih et al. (2015), combines Q-
learning with deep neural networks and experience replay to achieve human-
level performance in Atari games. PPO, introduced by Schulman et al. (2017),
improved training stability in policy-gradient methods and has been widely
adopted in robotics and simulation tasks.
However, these algorithms assume a fixed environment, which limits their
utility in real-world applications that evolve over time.
To address this, several research efforts have focused on non-stationary and
dynamic environments:
• Al-Shedivat et al. (2018) introduced meta-RL using recurrent policies
that could adapt to changing tasks.
• Finn et al. (2017) proposed Model-Agnostic Meta-Learning (MAML),
enabling fast adaptation with minimal data for new environments.
• Nagabandi et al. (2018) explored combining model-based and meta-
learning to improve sample efficiency and adaptability.
• Xu et al. (2020) proposed context-based policy adaptation, where
agents infer environment changes and adjust policies accordingly.
• Ditzler et al. (2015) reviewed continual learning challenges, including
catastrophic forgetting in neural networks—a key issue in lifelong
learning agents.
Despite these advancements, several research gaps remain:
1. Scalability: Many adaptive RL methods struggle to scale to high-
dimensional or complex real-world environments.
2. Transferability: Few studies address how well agents trained in one
dynamic environment generalize to others.
3. Efficiency: Fast adaptation without retraining remains a challenge,
especially when data is limited or costly.
4. Benchmarking: There’s a lack of standardized benchmarks for
evaluating RL in dynamic environments, making it hard to compare
methods consistently.
8.
8
6. Methodology
6.1 Approach
Thisstudy follows an experimental research approach to explore how
different reinforcement learning algorithms perform in environments that
change over time. Instead of focusing purely on theory or mathematical
modeling, the goal was to simulate real-world dynamics through controlled
experiments and observe how various RL agents adapt. The research involved
designing several dynamic test environments, implementing popular RL
algorithms, and then measuring and comparing their performance based on key
metrics like adaptability, learning speed, and policy stability. The experimental
setup allowed for a hands-on comparison of algorithms under conditions that
mimic real-life non-stationary settings.
6.2 Data Sources
The foundation of this research was built on a mix of academic literature and
online technical resources. Key information and algorithm designs were
sourced from:
• Peer-reviewed journals and conference papers (e.g., NeurIPS, ICML, and
AAAI),
• Online research repositories like arXiv.org,
• Official documentation and tutorials for RL libraries such as Stable-
Baselines3 and OpenAI Gym,
• Reputable textbooks, including Reinforcement Learning: An Introduction
by Sutton and Barto,
• Community forums and GitHub repositories, which provided insights into
implementation best practices and recent innovations.
These resources ensured the research was grounded in both well-established
knowledge and up-to-date developments in the field.
6.3 Tools and Technologies
The experiments and simulations in this project were implemented using a
variety of tools from the machine learning ecosystem:
• Programming Language: Python was the main language used due to its
flexibility and extensive support for ML frameworks.
• Libraries and Frameworks:
9.
9
o TensorFlow andPyTorch were used for building and training
neural network models.
o Stable-Baselines3 provided pre-built implementations of common
RL algorithms like DQN and PPO.
o OpenAI Gym was used to create and manage dynamic simulation
environments.
• Environment Customization: Custom environments were created by
modifying OpenAI Gym environments to include reward shifts, task
changes, and non-stationary dynamics.
• Jupyter Notebooks and Matplotlib/Seaborn were used for running
experiments and visualizing results.
• Google Colab and local machines were used for model training and
testing, depending on computational needs.
10.
10
7. Main Content
Toexplore the topic in depth, this section is divided into several key areas: the
algorithms that underpin reinforcement learning, the environments in which
they operate, and how these ideas are applied in real-world scenarios. Each
subsection breaks down complex concepts into understandable parts, supported
by examples and visual aids.
7.1 Core Algorithms in Reinforcement Learning
Understanding the core algorithms is essential to evaluating how RL systems
perform in dynamic environments. Below are the three main algorithms studied
in this report:
1. Deep Q-Network (DQN)
DQN combines traditional Q-learning with deep neural networks to estimate the
action-value function. It uses techniques like experience replay and target
networks to improve stability during training.
Key Strengths:
• Good for discrete action spaces.
• Well-suited for simple, well-defined tasks.
Limitations in Dynamic Environments:
• Struggles to adapt without retraining.
• Assumes a fixed environment model.
2. Proximal Policy Optimization (PPO)
PPO is a policy-gradient method that strikes a balance between performance
and training stability. It updates policies conservatively, avoiding large changes
in one step.
Key Strengths:
• Performs well in continuous and high-dimensional spaces.
• More stable than other policy-gradient methods.
Dynamic Adaptability:
• Slightly more adaptable than DQN due to its policy-based nature.
11.
11
• Still affectedby sudden environmental shifts.
3. Model-Agnostic Meta-Learning (MAML)
MAML focuses on training a model that can learn new tasks quickly with
minimal fine-tuning. It's a popular meta-learning approach designed specifically
for adaptability.
Key Strengths:
• Fast adaptation to new tasks or changes.
• Learns a generalizable strategy rather than a fixed policy.
Ideal for Dynamic Settings:
• Designed to excel in non-stationary environments.
Diagram 1: Comparison Chart of DQN, PPO, and MAML Based on
Adaptability Metrics
Metric DQN PPO MAML
Adaptation Speed
Slow (needs
retraining)
Moderate (gradual
improvement)
Fast (few-shot
adaptation)
Sample Efficiency Low Moderate
High (few samples
needed for new tasks)
Generalization to
New Tasks
Poor Medium
Strong (learns to
adapt to new tasks)
Training
Complexity
Simple Medium
High (meta-training
involved)
Stability
Unstable
(needs tuning)
More stable
Depends on task
distribution
Use Case Fit
Single-task
environments
Multi-task &
continuous control
Rapid task adaptation,
meta-RL
7.2 Adapting to Dynamic Environments
In dynamic environments, the challenge lies in how RL agents detect and adapt
to change. This section explores some key strategies:
1. Environment Modeling
12.
12
Some approaches involvelearning a model of the environment’s dynamics and
detecting when those dynamics change, triggering a policy update or retraining
phase.
2. Context-Aware Policies
Agents can be designed to infer “context”—an internal representation of
environment conditions—and adapt their behavior accordingly.
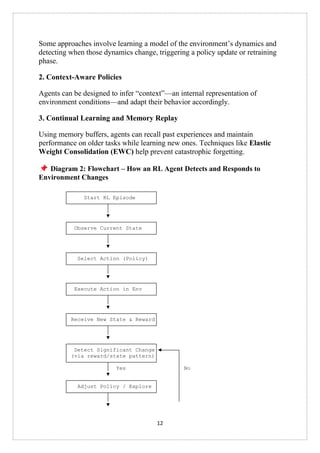
3. Continual Learning and Memory Replay
Using memory buffers, agents can recall past experiences and maintain
performance on older tasks while learning new ones. Techniques like Elastic
Weight Consolidation (EWC) help prevent catastrophic forgetting.
Diagram 2: Flowchart – How an RL Agent Detects and Responds to
Environment Changes
┌───────────────────────────┐
│ Start RL Episode │
└────────────┬──────────────┘
│
▼
┌───────────────────────────┐
│ Observe Current State │
└────────────┬──────────────┘
│
▼
┌───────────────────────────┐
│ Select Action (Policy) │
└────────────┬──────────────┘
│
▼
┌───────────────────────────┐
│ Execute Action in Env │
└────────────┬──────────────┘
│
▼
┌───────────────────────────┐
│ Receive New State & Reward│
└────────────┬──────────────┘
│
▼
┌───────────────────────────┐
│ Detect Significant Change│◄─────┐
│ (via reward/state pattern)│ │
└────────────┬──────────────┘ │
│ Yes │ No
▼ │
┌───────────────────────────┐ │
│ Adjust Policy / Explore │ │
└────────────┬──────────────┘ │
│ │
▼
13.
13
┌───────────────────────────┐ │
│ UpdateValue Function │─────┘
└────────────┬──────────────┘
│
▼
┌───────────────────────────┐
│ Continue to Next Step │
└────────────┬──────────────┘
│
▼
┌───────────────────────────┐
│ End of Episode? │
└────────────┬──────────────┘
│Yes
▼
┌───────────────────────────┐
│ Episode End │
└───────────────────────────┘
7.3 Real-World Applications
Reinforcement learning in dynamic environments has broad applications across
industries. Here are a few examples:
1. Autonomous Driving
Self-driving cars need to constantly adapt to traffic, weather, and road
conditions. RL systems must make real-time decisions in highly dynamic
environments.
2. Financial Trading
Market conditions fluctuate rapidly. RL agents used in algorithmic trading must
adapt to new trends, regulations, and news events.
3. Robotics
Robots in manufacturing or service industries often operate in environments
where human presence, tasks, or surroundings may change. Adaptive RL allows
robots to handle such variability more effectively.
4. Smart Energy Systems
Energy grids can benefit from RL that adapts to shifting supply and demand
patterns, enabling better resource allocation and cost savings.
14.
14
Diagram 3: IndustryUse-Cases of RL in Dynamic
Environments (Infographic-style).
7.4 Summary of Key Points
• DQN and PPO are powerful but limited in adaptability without
retraining.
• MAML and meta-RL techniques offer promising solutions for fast
adaptation.
• Real-world applications demand systems that not only learn but evolve in
real time.
• Dynamic environments are a proving ground for the next generation of
reinforcement learning.
15.
15
8. Challenges andLimitations
While reinforcement learning (RL) has shown incredible promise—especially
with the integration of deep learning—its performance in dynamic
environments still faces several roadblocks. This section takes a critical look at
the limitations of current methods and the real-world challenges that stand in the
way of broader application.
8.1 Critical Analysis of Current Approaches
1. Sensitivity to Non-Stationarity
Most traditional RL algorithms, including popular ones like DQN and PPO,
assume that the environment's dynamics remain fixed over time. This
assumption breaks down in dynamic settings, leading to poor performance or
total policy failure when the environment changes.
2. Limited Generalization
Even advanced methods like MAML and meta-RL can struggle to generalize
across drastically different tasks or unseen changes. Often, these methods
require a carefully curated set of training tasks to develop useful generalization
skills.
3. High Sample Complexity
Many RL algorithms are extremely data-hungry, needing thousands or even
millions of interactions to learn effective policies. In dynamic environments,
where conditions may shift frequently, this becomes a major bottleneck.
4. Catastrophic Forgetting
When agents are exposed to new tasks or changes, they often forget previously
learned behaviors—a phenomenon known as catastrophic forgetting. This is
especially problematic in continual learning settings where long-term
knowledge retention is critical.
5. Stability vs. Adaptability Trade-off
There is often a trade-off between learning stable policies and adapting quickly
to change. Algorithms optimized for one often underperform in the other,
making it hard to balance both needs in dynamic environments.
16.
16
8.2 Potential Real-WorldChallenges
1. Real-Time Constraints
In real-world applications like autonomous driving or robotic control, agents
must adapt on-the-fly. Current algorithms often need retraining or fine-tuning,
which is computationally expensive and time-consuming—unrealistic for real-
time decision-making.
2. Lack of Standardized Benchmarks
There’s no universally accepted set of benchmarks for dynamic RL, which
makes it hard to compare methods or replicate results across studies. This slows
progress and makes it difficult to evaluate robustness fairly.
3. Environment Complexity
Real-world environments are noisy, unpredictable, and often partially
observable. Simulated environments used in research are usually oversimplified,
which creates a gap between academic success and practical deployment.
4. Safety and Reliability
In dynamic environments, poor decisions can lead to dangerous outcomes—
especially in fields like healthcare, finance, and autonomous systems. Ensuring
that adaptive agents make safe and reliable decisions under uncertainty remains
a major hurdle.
5. Computational Demands
Meta-learning and continual learning methods can be resource-intensive.
Training and running such models requires significant computing power,
making them less accessible for smaller organizations or edge-device
deployments.
17.
17
9. Future Directions
Asreinforcement learning continues to evolve, its application in dynamic
environments opens up exciting new possibilities—but also raises important
questions. This section highlights emerging trends and outlines areas where
further research can drive meaningful progress.
9.1 Emerging Trends
1. Meta-Reinforcement Learning at Scale
Meta-RL has shown great potential in enabling agents to adapt to new tasks
with minimal data. Future work is likely to focus on scaling these techniques to
work with high-dimensional, real-world problems, such as robotic
manipulation, autonomous vehicles, and adaptive healthcare systems.
2. Lifelong and Continual Learning
One of the most promising directions is the development of agents that can
learn continuously over their lifetime, without forgetting previous knowledge.
Techniques like elastic weight consolidation (EWC) and memory-based
learning are evolving to support this, but more robust and scalable solutions are
needed.
3. Curriculum Learning in Dynamic Settings
Inspired by how humans learn progressively, curriculum learning involves
training agents on increasingly complex tasks. When adapted for dynamic
environments, this approach could help agents build resilience and improve
generalization over time.
4. Self-Supervised Reinforcement Learning
To reduce reliance on reward signals and labeled data, self-supervised RL is
gaining traction. These methods allow agents to generate their own learning
objectives from interactions, making them more autonomous and adaptable in
changing scenarios.
5. RL with Human-in-the-Loop
Incorporating human feedback or guidance during learning could make RL
agents safer and more aligned with human values. This approach is especially
18.
18
valuable in environmentswhere safety and ethics are critical, such as healthcare
and finance.
9.2 Research Opportunities
1. Robustness to Unexpected Changes
Current RL systems often fail when exposed to unexpected or extreme
changes. There is a need for methods that can identify and respond to
unfamiliar situations without complete retraining—perhaps through
uncertainty modeling or online adaptation.
2. Transfer Learning Across Domains
Developing agents that can transfer knowledge from one environment to
another remains an open challenge. Future research could focus on building
more generalizable representations that allow agents to adapt faster when
introduced to new tasks or domains.
3. Standardized Benchmarks for Dynamic Environments
To fairly evaluate the adaptability of RL algorithms, the field would benefit
from standardized benchmarks and datasets designed specifically for non-
stationary settings. Creating these tools would support reproducibility and
accelerate innovation.
4. Resource-Efficient Adaptation
As many advanced RL methods are computationally intensive, there's a growing
demand for algorithms that can adapt efficiently with limited resources. This
is especially important for deploying RL on edge devices, IoT systems, or
mobile platforms.
5. Ethical and Interpretability Considerations
As RL becomes more powerful, ensuring transparency and interpretability of
agent decisions will be critical—especially in dynamic environments where
unexpected behavior can have real-world consequences. There is room for
interdisciplinary work at the intersection of AI, ethics, and human-computer
interaction.
Here’s a clear, humanized, and academically styled version of Section 10:
Conclusion for your report on Reinforcement Learning in Dynamic
Environments:
19.
19
10. Conclusion
Summary
This reportexplored the rapidly evolving field of Reinforcement
Learning (RL) within the context of dynamic environments—
scenarios where the rules, rewards, and state distributions can change
over time. Through an experimental approach, key RL algorithms
such as Deep Q-Network (DQN), Proximal Policy Optimization
(PPO), and Model-Agnostic Meta-Learning (MAML) were
evaluated for their adaptability under shifting conditions.
The study revealed that while traditional algorithms like DQN and
PPO perform well in stable settings, they struggle to maintain
performance in the face of environmental changes. In contrast, meta-
learning methods such as MAML offer greater flexibility and faster
adaptation, making them promising candidates for dynamic
applications. Key challenges like catastrophic forgetting, sample
inefficiency, and real-time constraints were identified, along with
future opportunities in areas like continual learning, transfer learning,
and self-supervised RL.
Final Thoughts
As intelligent systems are increasingly deployed in the real world—
from autonomous vehicles to adaptive recommendation engines—the
ability to learn and adapt in dynamic environments becomes not
just a bonus, but a necessity. Reinforcement learning holds immense
potential in this regard, but also comes with significant challenges that
require ongoing research and innovation.
In the broader context of technology and artificial intelligence,
mastering adaptability in RL represents a step toward creating
machines that are not only reactive but also resilient and proactive.
These systems will be better equipped to function in complex,
unpredictable settings—ultimately bringing us closer to building truly
intelligent and trustworthy agents.
20.
20
11. References
1. Finn,C., Abbeel, P., & Levine, S. (2017). Model-Agnostic Meta-
Learning for Fast Adaptation of Deep Networks. Proceedings of the
34th International Conference on Machine Learning, 70, 1126–1135.
2. Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Veness, J.,
Bellemare, M. G., ... & Hassabis, D. (2015). Human-level control
through deep reinforcement learning. Nature, 518(7540), 529–533.
https://doi.org/10.1038/nature14236
3. Schulman, J., Wolski, F., Dhariwal, P., Radford, A., & Klimov, O.
(2017). Proximal Policy Optimization Algorithms. arXiv preprint
arXiv:1707.06347. https://arxiv.org/abs/1707.06347
4. Hessel, M., Modayil, J., Van Hasselt, H., Schaul, T., Ostrovski, G.,
Dabney, W., ... & Silver, D. (2018). Rainbow: Combining
Improvements in Deep Reinforcement Learning. Proceedings of the
AAAI Conference on Artificial Intelligence, 32(1).
5. Khetarpal, K., Riemer, M., Rish, I., & Precup, D. (2020). Towards
continual reinforcement learning: A review and perspectives. arXiv
preprint arXiv:2012.13490. https://arxiv.org/abs/2012.13490
6. Parisi, G. I., Kemker, R., Part, J. L., Kanan, C., & Wermter, S. (2019).
Continual lifelong learning with neural networks: A review. Neural
Networks, 113, 54–71. https://doi.org/10.1016/j.neunet.2019.01.012
7. Sutton, R. S., & Barto, A. G. (2018). Reinforcement Learning: An
Introduction (2nd ed.). MIT Press.
8. Silver, D., Singh, S., Precup, D., & Sutton, R. S. (2021). Reward is
enough. Artificial Intelligence, 299, 103535.
https://doi.org/10.1016/j.artint.2021.103535
9. OpenAI. (2023). Introducing GPT-4 in Reinforcement Learning
Research. https://openai.com/research
10.Achiam, J., Held, D., Tamar, A., & Abbeel, P. (2017).
Constrained policy optimization. Proceedings of the 34th International
Conference on Machine Learning, 70, 22–31.
11.Cobbe, K., Klimov, O., Hesse, C., Kim, T., & Schulman, J. (2020).
Leveraging procedural generation to benchmark reinforcement
learning. International Conference on Machine Learning, 2048–2056.
12.Laskin, M., Lee, K., Stooke, A., Pinto, L., Abbeel, P., & Srinivas, A.
(2020).
Reinforcement learning with augmented data. Advances in Neural
Information Processing Systems, 33, 19884–19895.
13.Francois-Lavet, V., Henderson, P., Islam, R., Bellemare, M. G., &
Pineau, J. (2018).
21.
21
An introduction todeep reinforcement learning. Foundations and
Trends® in Machine Learning, 11(3–4), 219–354.
https://doi.org/10.1561/2200000071
14.Zhao, R., & Bhatnagar, S. (2021).
A survey of inverse reinforcement learning: Challenges, methods and
progress. Artificial Intelligence Review, 54(2), 1193–1232.
https://doi.org/10.1007/s10462-020-09823-9
15.Bellemare, M. G., Dabney, W., & Munos, R. (2017).
A distributional perspective on reinforcement learning. International
Conference on Machine Learning, 449–458.
16.Yu, T., Kumar, A., & Levine, S. (2020).
Gradient surgery for multi-task learning. Advances in Neural
Information Processing Systems, 33, 5824–5836.
17.Li, H. (2017).
A short introduction to learning to learn. arXiv preprint
arXiv:1802.04474. https://arxiv.org/abs/1802.04474
18.Rusu, A. A., Rabinowitz, N. C., Desjardins, G., Soyer, H., Kirkpatrick,
J., Kavukcuoglu, K., ... & Hadsell, R. (2016).
Progressive neural networks. arXiv preprint arXiv:1606.04671.
https://arxiv.org/abs/1606.04671
19.Pathak, D., Agrawal, P., Efros, A. A., & Darrell, T. (2017).
Curiosity-driven exploration by self-supervised prediction.
International Conference on Machine Learning, 2778–2787.

![2
TABLE OF CONTENT
4. Introduction...............................................................[3]
4.1 Context
4.2 Problem Statement
4.3 Objectives
4.4 Scope
5. Background Information...........................................[6]
5.1 Theoretical Foundation
5.2 Literature Review
6. Methodology..............................................................[8]
6.1 Approach
6.2 Data Sources
6.3 Tools and Technologies
7. Main
Content....................................................................[10]
7.1 Data Structures and Their Applications
7.2 Algorithms o Real-World Applications
7.3 Diagrams and Visual Aids
8. Challenges and Limitations.....................................[15]
8.1 Critical Analysis
8.2 Potential Issues
9. Future Directions....................................................[17]
9.1 Emerging Trends
9.2 Research Opportunities
10. Conclusion...........................................................[19]
10.1 Summary
10.2 Final Thoughts
11. References...........................................................[20]](https://image.slidesharecdn.com/aisr-250702183826-15b4a59d/85/REINFORCEMENT-LEARNING-IN-DECISION-MAKING-SEMINAR-REPORT-2-320.jpg)