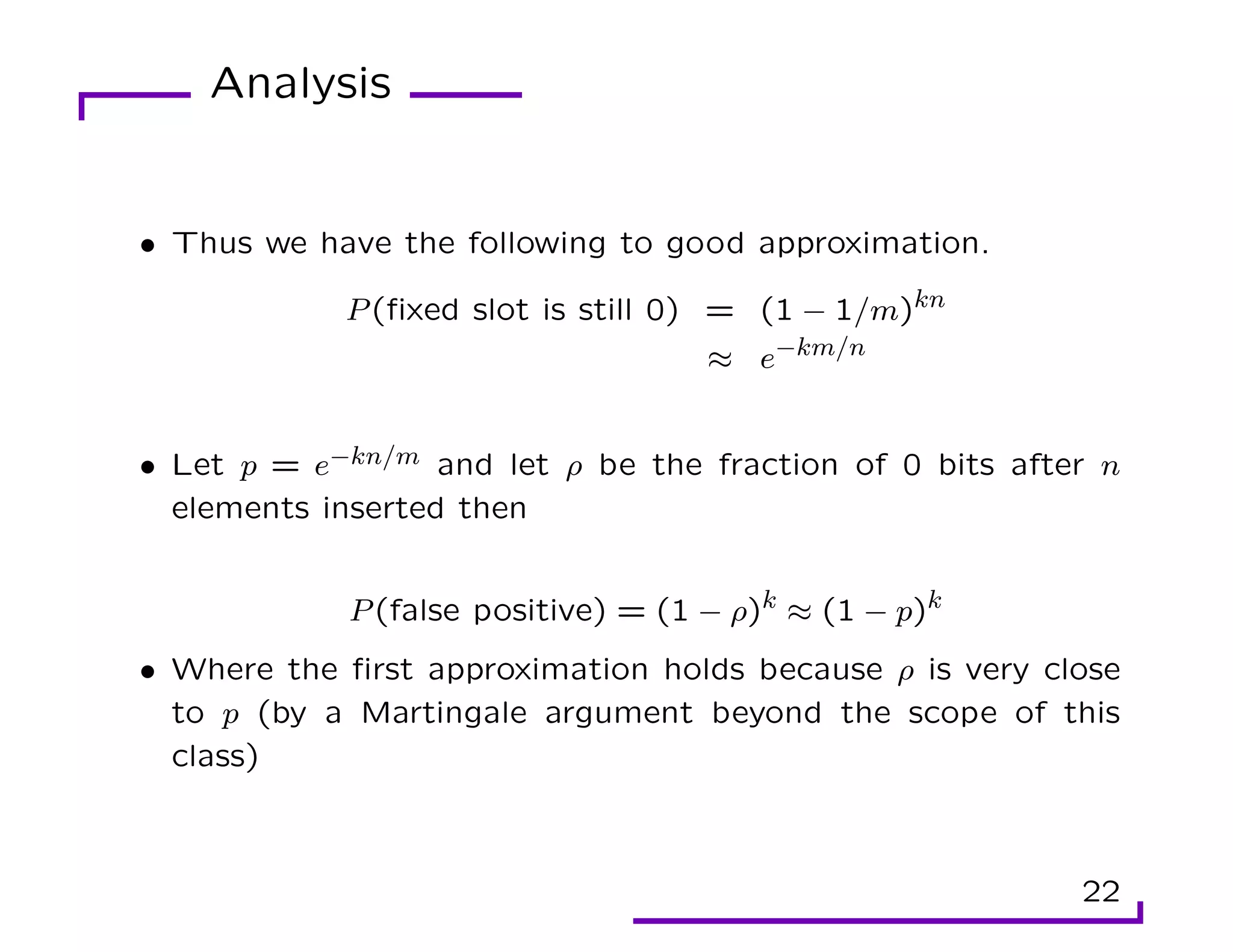
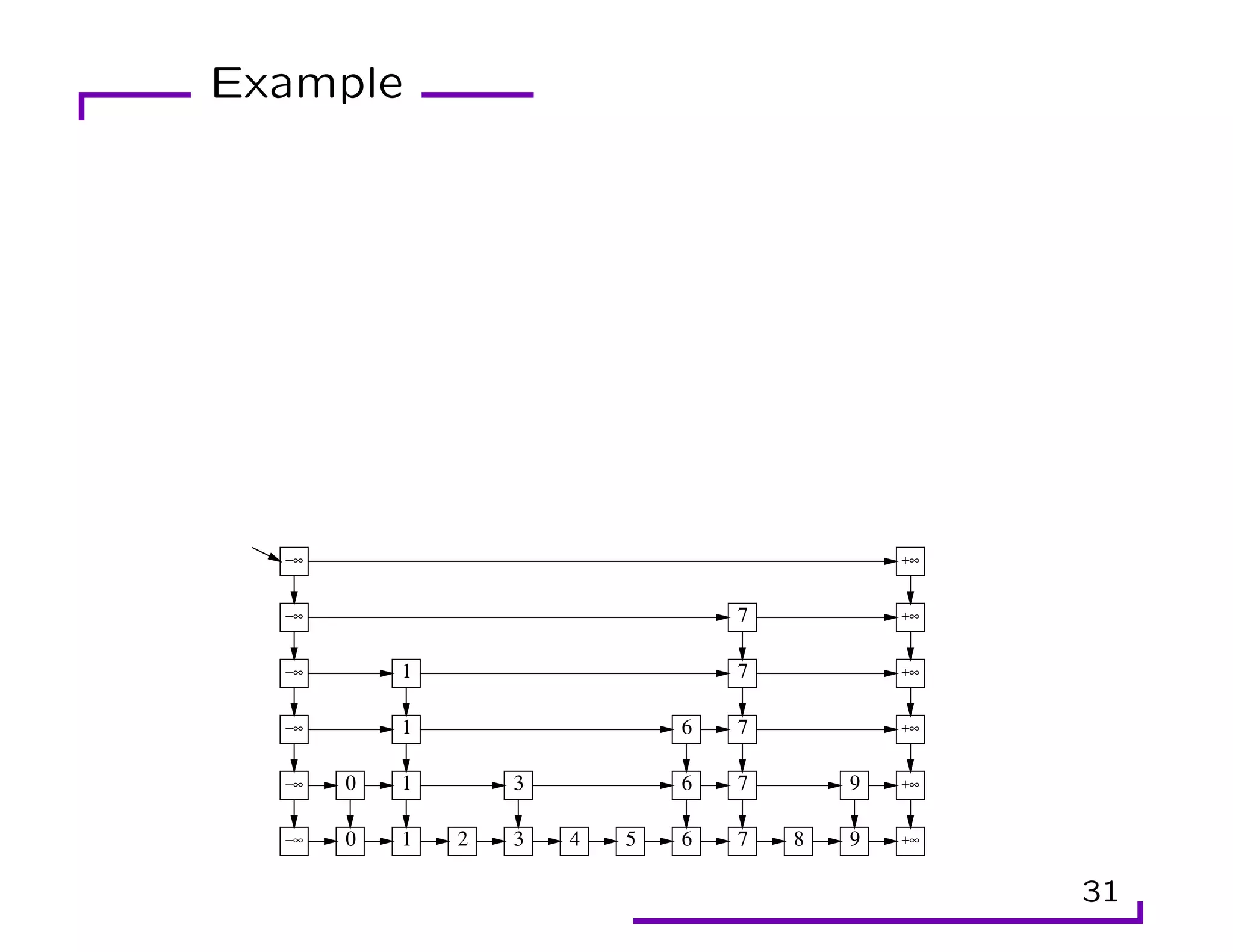
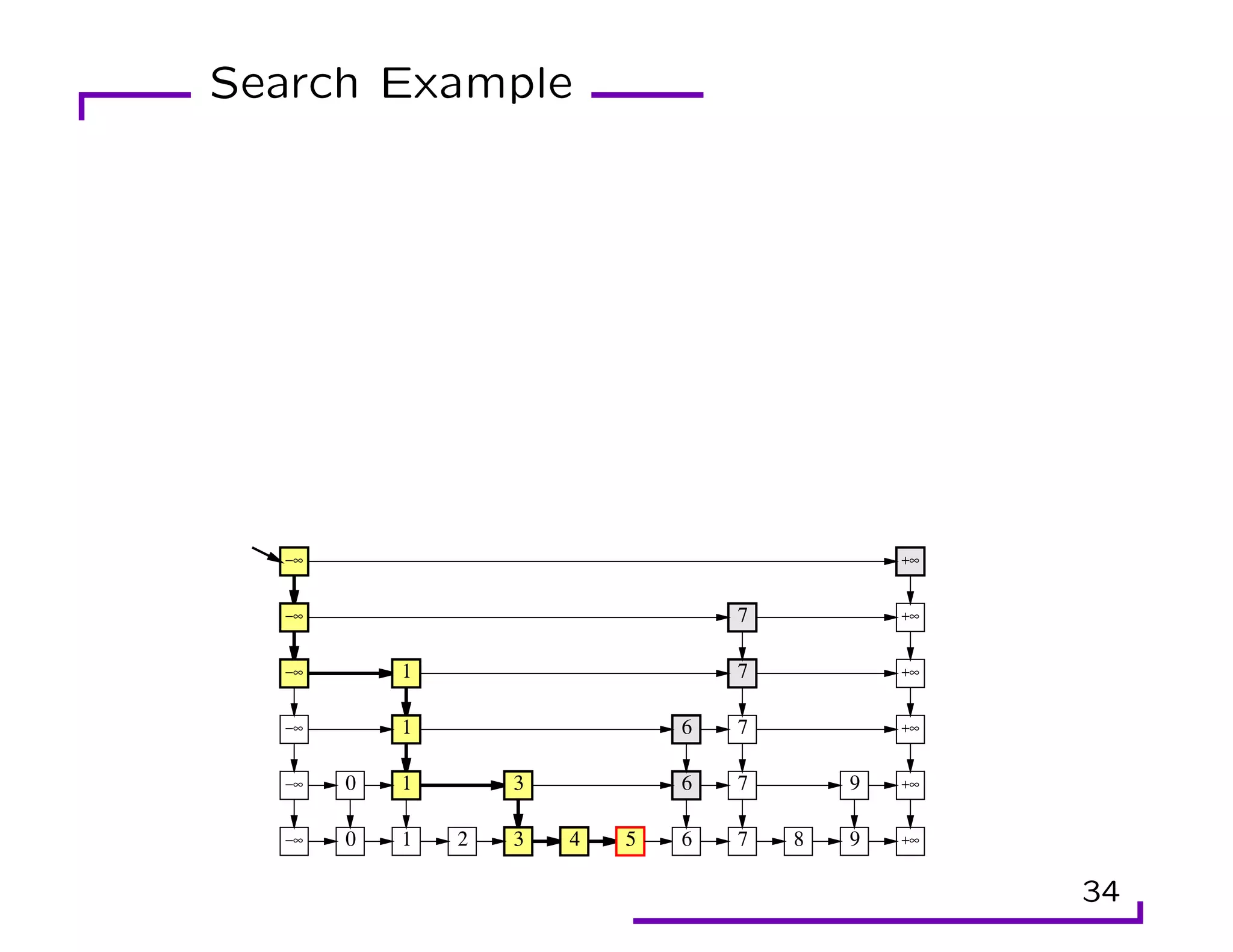
This document provides an overview of randomization techniques used in data structures, including hash tables, bloom filters, and skip lists. It discusses how each of these structures implements a dictionary abstract data type (ADT) with operations like insert, delete, and lookup. For hash tables, it describes direct addressing, chaining to resolve collisions, and analysis showing expected constant time performance. Bloom filters are explained as a space-efficient probabilistic data structure for set membership with possible false positives. Skip lists are randomized balanced search trees that provide logarithmic time performance for dictionary operations.




![Direct Addressing
• Suppose universe of keys is U = {0, 1, . . . , m − 1}, where m is
not too large
• Assume no two elements have the same key
• We use an array T[0..m − 1] to store the keys
• Slot k contains the elem with key k
8](https://image.slidesharecdn.com/lec2-220929162840-68bcfe96/75/Randamization-pdf-9-2048.jpg)
![Direct Address Functions
DA-Search(T,k){ return T[k];}
DA-Insert(T,x){ T[key(x)] = x;}
DA-Delete(T,x){ T[key(x)] = NIL;}
Each of these operations takes O(1) time
9](https://image.slidesharecdn.com/lec2-220929162840-68bcfe96/75/Randamization-pdf-10-2048.jpg)

![Chained Hash
In chaining, all elements that hash to the same slot are put in a
linked list.
CH-Insert(T,x){Insert x at the head of list T[h(key(x))];}
CH-Search(T,k){search for elem with key k in list T[h(k)];}
CH-Delete(T,x){delete x from the list T[h(key(x))];}
12](https://image.slidesharecdn.com/lec2-220929162840-68bcfe96/75/Randamization-pdf-13-2048.jpg)














































![[DSC Europe 25] Hans Kleinsman - The Compliance Gearbox: How Tax Tech Mediate...](https://cdn.slidesharecdn.com/ss_thumbnails/dxdytie1toel0hr90bjs-2-251212103250-174fdbe7-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Aleksandra Dragicevic - AI-Boosted Research in Healthcare: Fr...](https://cdn.slidesharecdn.com/ss_thumbnails/iqwngszurf2r7pi1lnnj-4-aleksandra-dragicevic-ad-dsc-europe-conference-20-251208151905-37c3238a-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DSC Europe 25] Milan Zdravkovic - The road less traveled in District Heating...](https://cdn.slidesharecdn.com/ss_thumbnails/nfaboniqwsz4ucyctnmy-2-milan-zdravkovic-dsc2025-the-road-less-traveled-in-district-heating-operation-251208151905-f56388a5-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Sara Polak - The Ancient Operating System: What Archaeology T...](https://cdn.slidesharecdn.com/ss_thumbnails/3vch2p6tttdnwhsgazoz-3-sara-polak-smart-cities-251208152532-64404202-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Dobrica Cosic - Savings by the Second: How Dynamic Pricing an...](https://cdn.slidesharecdn.com/ss_thumbnails/znp09f3smtqz3w2sq6wn-1-dobrica-cosic-savings-by-the-second-how-dynamic-pricing-and-smart-data-are-bu-251208151905-26e6f41e-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Bassam Maharmeh - Artificial Intelligence: Opportunities and ...](https://cdn.slidesharecdn.com/ss_thumbnails/thhfmr2fqpawzj7hsjpg-5-251211083048-2c23204f-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Jon Dajci - Bridging TradFi and DeFi: Building the Future of ...](https://cdn.slidesharecdn.com/ss_thumbnails/fqmhfvlbqhkihjvqvhmu-7-251211083849-6af7e325-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Branko Dzakula - From Defense to Attack: How AI Redefines Cyb...](https://cdn.slidesharecdn.com/ss_thumbnails/80bdzdxpr3ky2g0qvyk9-8-251211083048-ce5fc1ee-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DSC Europe 25] Sara Polak - The Archaeology of Innovation: AI as the Next Cr...](https://cdn.slidesharecdn.com/ss_thumbnails/7ecbscdnt8mlcuqbd2ln-2-sara-polak-ai-creative-industries-251208152533-aa1fcf54-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Dusan Nesic - Securing Tomorrow’s Infrastructure: Why Cyber-P...](https://cdn.slidesharecdn.com/ss_thumbnails/qikbszfftyowjm2q6duw-1-251211083848-8f2ead6b-thumbnail.jpg?width=640&height=640&fit=bounds)