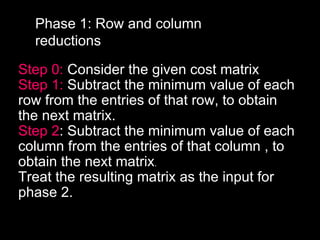
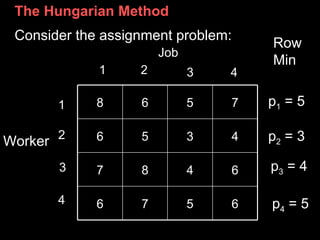
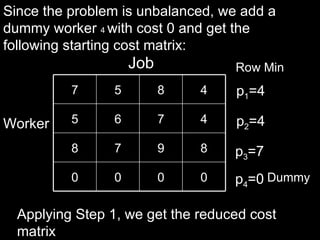
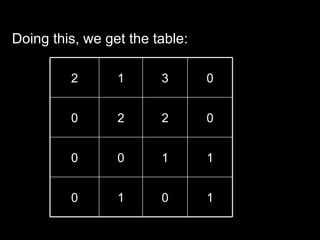
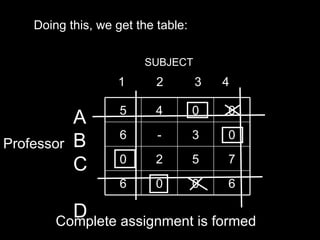
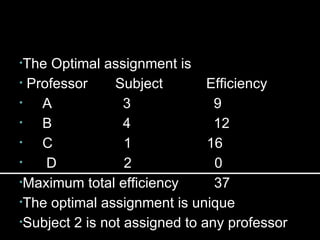
The Hungarian method is an algorithm that solves assignment problems in polynomial time. It was developed by Harold Kuhn in 1955. The method finds the optimal assignment between two equally sized sets that maximizes the total value of assignments. It works by constructing and updating a cost matrix through row and column reductions until the optimal assignment is revealed.