Downloaded 17 times
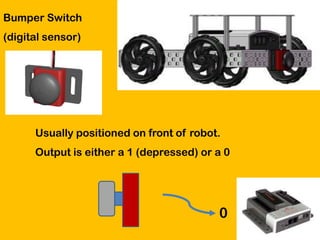
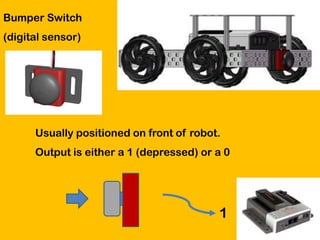
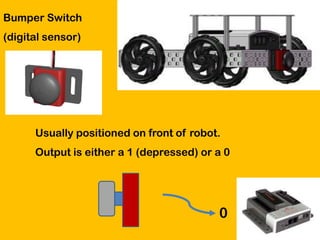
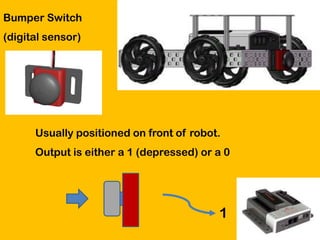
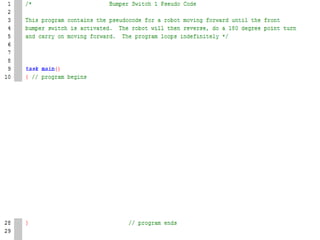
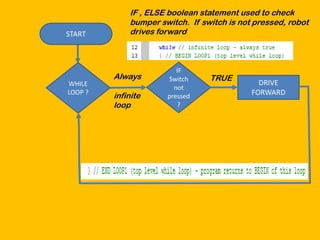
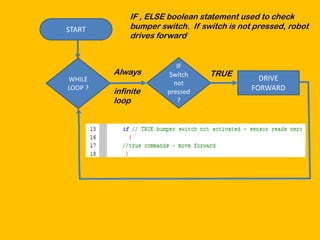
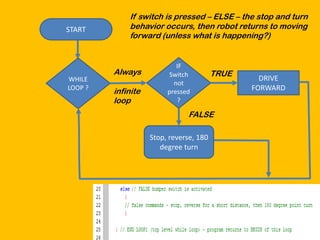

This document discusses programming a robot to drive forward indefinitely but stop and reverse if its bumper switch is pressed. [1] It introduces bumper switches, which output a 1 when pressed and a 0 when not pressed. [2] It presents a flowchart and pseudocode to describe the desired behavior. [3] The flowchart and pseudocode are then expanded on to more accurately represent the logic needed to program the behavior in ROBOTC.